乘员约束系统仿真假人姿态自适应APP 开发应用
2023-12-09王国锋姚再起廖慧红
姜 迪, 沈 辉, 王国锋, 姚再起, 廖慧红
(吉利汽车研究院(宁波)有限公司, 浙江 宁波 315336)
0 引言
随着汽车保有量的增加, 人们对汽车的安全性提出了越来越高的要求[1]。汽车的安全系统通常从主动安全和被动安全两方面考虑, 其中汽车主动安全技术指发生事故之前,防止汽车发生事故采取的措施[2-7]。汽车被动安全技术主要为了在发生事故时最大程度的降低车内乘员受到伤害及行人在碰撞时发生的伤害[8]。鉴于汽车被动安全技术涉及范围广,通常对汽车被动安全采取实验的方法,随着计算机技术的发展, 计算机仿真的方法也开始被各大主机厂和零配件厂使用。考虑到实验方法的成本较高,试验周期长,且实验的结果存在一定的不稳定性,仿真方法在汽车被动安全方面起到了越来越重要的作用[9]。在涉及假人的碰撞仿真工况上, 按法规要求摆放假人是必不可少的步骤。 需要反复调整假人躯干、上臂、下臂、手腕、大腿、小腿、脚部角度,使其姿态满足法规要求。 该过程繁琐且耗时,反复调整假人的姿态使其符合法规要求,假人姿态调整合规是仿真精度的保证。 由于将假人手部调整到握住方向盘的操作比较麻烦, 该过程需要调整假人手部姿态,使手部握住方向盘,并进行手指回弹计算。 在实际仿真过程中, 通常为了降低假人姿态调整时操作的复杂程度,会将假人手部放置于方向盘两侧。 但在实际开车时,由于手部握住方向盘,并支撑在方向盘上,尤其对假人往前冲时有一定抵御作用。 因此,为提高计算精度,考虑手部握住方向盘是非常必要的。 在假人姿态摆放合规后,需要假人对座椅进行预压操作,该操作保证了后续仿真得以顺利进行。 由于预压计算需要先将假人移动到与座椅不干涉, 仿真工程师们一般将假人移动一个足够大的距离,再进行下一步接触,边界,控制卡片的设置。 这导致了在计算过程中产生了大量的无效计算时间。 因此,可以智能调整假人和座椅之前的距离是非常有必要的。 目前,国内外学者对乘员约束系统仿真中假人模型自动摆放的研究相对较少。
本文基于Python 对ANSA 进行二次开发, 实现了某型号假人自动移动到指定位置、姿态自适应调整,假人手指回弹,假人预压座椅的工具开发。 通过该APP 可自动导入假人模型,并将假人移动到指定位置,自动调整假人姿态,并生成手部回弹计算文件,导入计算后的结果文件可实现假人最终的姿态调整, 并输出姿态合规的假人文件。通过导入第一步生成的假人文件和提供的座椅文件,可智能地调整假人和座椅间距,自动实现假人预压座椅。通过本APP 可显著降低操作复杂程度, 规范操作步骤,缩短了建模时间及计算求解时间,提高了分析精度。
1 开发背景
为降低交通事故中车内乘员的伤害, 需要采取正确的汽车乘员约束系统[10-11]。约束系统的验证通常有实验方法和仿真方法。 对于实验的方法,在进行碰撞试验前,首先需要对假人实体模型按法规要求摆放,如图1 所示。对于仿真方法,在有限元模型搭建过程中,涉及到假人的导入,并根据法规要求将假人摆放到合适的位置,调整假人的姿态。 其中假人手部需要进行回弹分析,从而保证模型的计算精度。 假人摆放完毕后,还需要假人对座椅进行预压计算。
针对有限元分析方法,由于汽车乘员约束系统的分析都涉及到假人摆放,而摆放过程较为繁琐,转动上臂会影响下臂和手腕的前后、左右移动,转动大腿会影响小腿、脚部前后,左右的移动,因此需要反复调整假人四肢,摆放时间受工程师熟练程度影响。 同时,假人摆放的姿态和工程师习惯有很大关系,会出现假人摆放姿态不够规范的情况。 在座椅预压环节,工程师为了简化操作,会将座椅与假人之间的间隙调节的足够大,降低操作难度。 该行为不会影响计算精度,但会产生大量的无效计算时间,严重浪费计算资源。因此,开发一款自动化假人摆放工具,简化模型处理过程,减少无效计算时间是非常有必要的。

2 假人姿态自适应程序开发
2.1 假人姿态自适应程序开发思路
本文开发了一套乘员保护假人姿态自适应摆放工具。该工具分为两部分,第一部分为假人姿态自适应APP,实现假人姿态的自动摆放,考虑手指回弹,生成符合法规的假人模型文件。第二部分为假人座椅预压APP,实现假人自动移动到距座椅很近的位置,减少无效计算时间,生成预压后的座椅文件。
其中假人姿态自适应程序开发流程如图2 所示。 通过输入H 点坐标或者点选指定位置确定假人的位置,将自动导入假人模型到指定位置。 通过依次选择方向盘的单元,歇脚板的单元,油门踏板的单元,地板的单元,计算出假人的胳膊,手,腿,脚转动角度,并进行旋转。 若经过自动摆放,假人姿态仍不满足要求,用户可通过指定按钮对假人的手,脚进行微调使其满足要求。如果方向盘与手接触区域含有多个PID, 通过选方向盘上属性不同的单元获得方向盘区域。 设置完毕后会自动设置接触,边界,并导出手指回弹的计算文件, 经过求解得到计算后手指的坐标文件。 导入该文件即可输出手指经过回弹的假人模型文件。
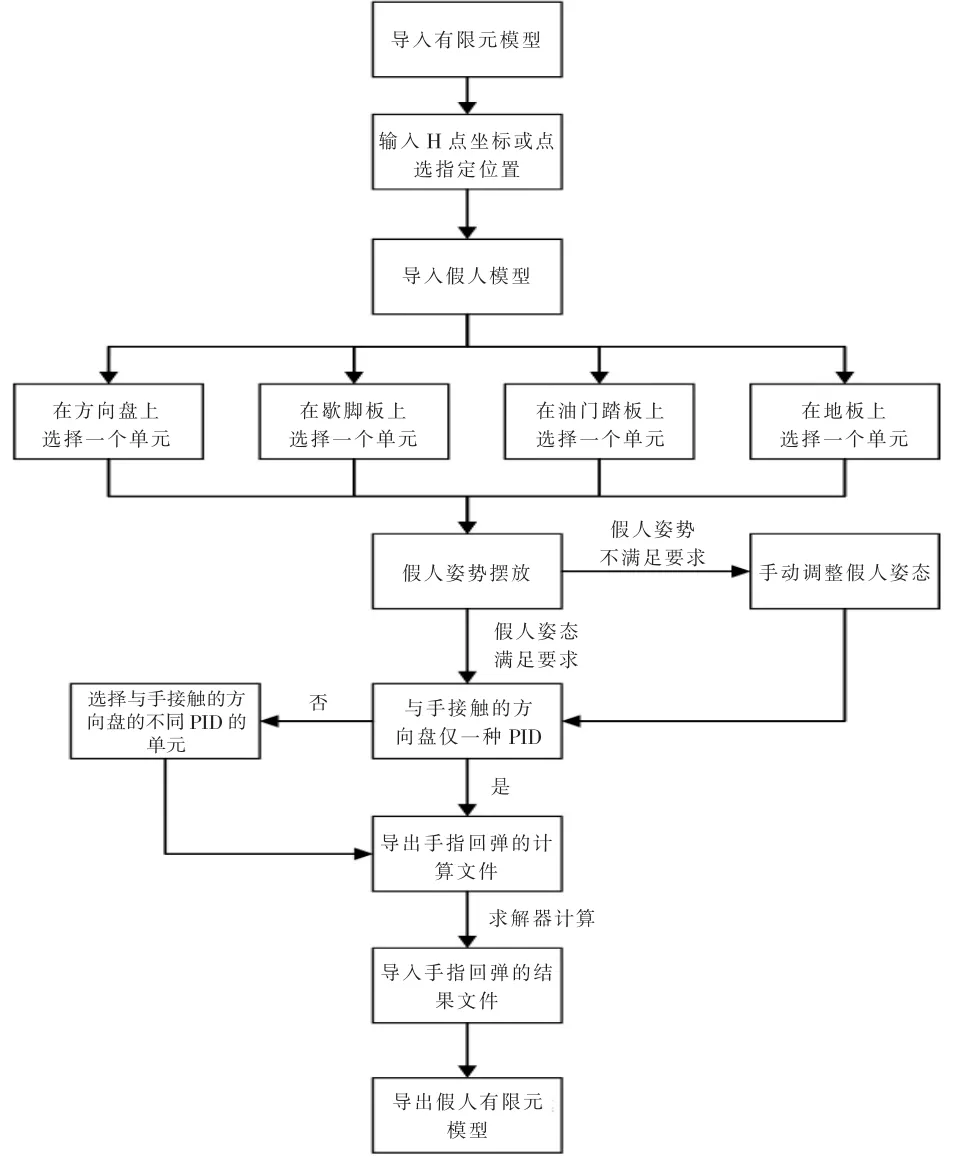
图2 假人姿态自适应程序开发流程Fig.2 Dummy posture adaptive program development process
2.2 假人预压座椅程序开发思路
对于假人臀部预压座椅程序开发流程如图3 所示。分别导入摆放好姿态的假人有限元模型以及座椅的有限元模型,选择输出路径,可自动删减假人模型,提取假人可能与座椅接触的部分,生成一个刚性体,自动生成边界条件,载荷及接触,并在指定路径下生成假人预压座椅计算文件,通过求解计算,得到座椅预压后的坐标文件,导入座椅预压后的坐标文件, 即可输出预压后的座椅有限元模型。

图3 假人预压座椅程序开发流程Fig.3 Dummy preloaded seat program development process
3 关键技术
3.1 假人手部移动到指定位置
假人上臂的长度,下臂和手作为一个整体的长度,手到肩膀的距离,这三个线段组成了一个三角形。如图4 所示,假设假人坐在指定位置时,它的上臂长度为OA 边,下臂和手总长度为AB 边,手到肩膀距离为BO 边。 当假人摆放合适时,它的上臂长度为OA"边,下臂和手总长度为A"B"边,手到肩膀的距离为B"O 边。由于OA"、A"B"和B"O 已知,可以得到∠OA"B"、∠A"B"O 和∠A"OB",自动调整∠OAB、∠ABO 和∠AOB,使∠OA"B"=∠OAB,∠A"B"O=∠ABO,∠A"OB"=∠AOB,既而得到ΔOA′B′。 ΔOA"B"≌ΔOA′B′。 再将ΔOA′B′绕O 点旋转到ΔOA"B",得到初步手臂和手的位置。 再通过自动计算手部指定节点到方向盘指定 位 置X 向,Y向,Z 向的距离使手部位置进一步调整, 从而使假人手部姿态满足要求。

图4 假人手臂简化图Fig.4 Simplified dummy arm
考虑到方向盘的造型存在差异以及手动选择方向盘上的单元位置存在偏差,本APP 提供了手动微调假人手部位置的按钮。 通过在APP 界面中选择需要移动的方向,填入移动距离即可实现在该方向上的移动。
3.2 假人脚部移动到指定位置
通过选择歇脚板的单元确定假人的大腿向外转动的角度,以左脚为例,具体操作如图5 所示,DE 为假人坐在指定位置时大腿初始状态在XY 平面上的投影,E′为歇脚板单元在XY 平面上投影的位置, 连接E′、E、D 三点,组成一个三角形, 从而可以计算出大腿向外转动的角度∠E′DE。 调整脚长的方向与整车坐标系下X 方向平行,通过限定鞋尖和鞋跟与地板间的距离自动调整小腿与脚的旋转角度。

图5 假人腿部投影简化图Fig.5 Simplified projection of dummy leg
考虑到选择单元位置的差异性, 本APP 提供了手动微调假人脚位置的按钮。 通过在APP 界面中选择需要移动的方向, 填入移动距离即可实现在该方向上的移动。
3.3 假人预压座椅
考虑到缩减仿真计算时间,在假人与座椅预压的过程中, 需要将摆放好的假人移动到与座椅接近且不接触的状态, 常规操作是将假人移动一定距离, 该距离保证假人与座椅不干涉且适用于各种车型,因此移动距离需足够的大,后进行预压计算,从而保证假人对座椅的顺利预压, 该过程增加了大量的无效计算时间,浪费计算资源。
本APP 将自动检查假人与座椅之间是否发生干涉,若发生干涉, 将假人沿Z 向及X 向移动一个较小的距离d。循环这个过程,直至假人与座椅不存在干涉,然后沿着Z 向及X 向反向移动距离d/2,此时假人与座椅若存在干涉会继续沿Z 向及X 向正向移动d/4,若不再干涉则继续反向移动d/4,以此类推,直至再次移动的距离小于设定值且假人与座椅无干涉, 则停止假人移动并计算总移动距离,保存在后台数据库中,生成相应的数据曲线,从而省去了不必要的计算时间。
4 程序界面效果
4.1 假人姿态自适应程序界面
假人姿态自适应APP 界面如图6 所示。 用户需要将H 点的坐标输入到指定框中, 或者通过点选的方式自动在框中得到坐标。通过选择方向盘上一个单元(这里选择假人左手握住方向盘时虎口与方向盘最近的壳单元),再依次选择歇脚板上一个单元,油门踏板上一个单元,车内地板上一个单元,即可得到调整好姿态的假人。如果用户对假人局部姿态不满意,可以通过指定按钮微调手和脚,使手或者脚可以前后左右移动,直至假人模型满足要求,如图7 所示。 若假人手部与方向盘接触位置有不止一种PID,可以通过点选不同PID 的单元得到所有方向盘上与手接触的单元。 选择输出路径,后台自动生成边界条件,接触, 即可得到假人手指回弹的计算文件。 通过求解计算,得到手指回弹后的坐标,再次导入手指回弹后的坐标文件,得到符合要求的假人有限元模型文件。

图6 假人姿态自适应程序界面Fig.6 Dummy pose adaptive program interface

图7 摆放后的假人Fig.7 The dummy after placement
4.2 假 人 预 压 座 椅程序界面
假人预压座椅APP 界 面 如 图8 所示。 用户需要输入假人有限元模型,输入座椅部分的有限元模型, 选择输出路径,程序后台自动生成边界,载荷,接触,最终输出假人预压座椅的计算文件。通过求解,得到座椅结果文件。通过输入计算后的座椅节点坐标,可得到预压后座椅的有限元模型。假人预压座椅APP 的开发可以在极短时间内生成座椅预压文件, 预压座椅程序界面如图8 所示。

图8 假人预压座椅程序界面Fig.8 Dummy preloaded seat program interface
5 结论
本文基于ANSA 开发了一套乘员约束系统仿真假人姿态自适应的自动化工具。 本APP 包含两部分,即假人姿态自适应和假人预压座椅。 使用本APP 可在5 分钟内(除去手指回弹计算的求解时间)完成假人摆放,在4 分钟内(除去座椅预计算的求解时间)完成假人座椅预压。该APP 明显降低操作复杂程度, 并且使分析规范化,提升假人摆放及座椅预压的建模效率达70%, 减少不必要的计算资源浪费,缩短建模和求解时间。
