基于ERT的可视化压力测量方法
2023-12-09党红云
党红云,刘 敏
(陕西能源职业技术学院 智能制造与信息工程学院,咸阳 712000)
力触觉传感器广泛应用于仿生机器人、康复医疗、工业生产等领域,主要用于感知与外界环境之间的接触力。易艺等[1]研究了一种电容式触觉传感器,其可通过检测微弱的电容变化实现触觉压力检测。薛丰等[2]设计了一种磁致伸缩触觉传感器,该传感器具有4个触觉传感单元,可以检测抓取物品的压力。曹鑫琳等[3]设计了一种液体PVDF(聚偏氟乙烯)压电纤维,工作时,导电纤维受到压力而发生变形,继而其电荷 量发生变化,通过这些变化可判断压力的大小和位置。VEERALINGAM 等[4]研究了一种4层高性能压阻式可穿戴压力传感器,其具有较好的灵敏度和可靠性。OTHMAN等[5]分析了触觉传感器在微创手术方面的潜在价值。杨平安等[6]介绍了电阻式柔性触觉传感器的检测原理和性能指标,讨论了其在触觉感知、人机交互、医疗健康等领域的相关应用。
目前,力触觉传感器需要将多个传感单元以阵列形式进行组合,实现多区域压力测量,压力测量的精度取决于传感单元的数量,该类压力测量方法制作工艺复杂、成本高。笔者基于电阻层析成像(ERT)技术,结合导电硅橡胶材料的压阻效应研究了一种压力测量方法并进行检测试验,试验结果表明,所提方法只需一块导电硅橡胶材料作为压力感知单元,就能够实时显示压力作用位置及大小,极大地简化了力触觉传感器的结构,并且能够实现整个测量区域的实时压力测量。
1 工作原理
文章以导电硅橡胶作为传感单元,利用导电硅橡胶材料的压阻效应来获得材料电导率的变化。然后,结合电阻层析成像技术,测量边界电压后即可反演出压力分布图像,其原理如图1所示。

图1 ERT压力测量方法工作原理示意
1.1 导电硅橡胶材料压阻效应
导电硅橡胶主要由导电颗粒(如金属、导电炭黑等)与硅橡胶混合而成,不仅具有橡胶材料良好的力学特性,还有一定的导电性能,在不同压力作用下,导电硅橡胶材料表现出不同的电学特性。当导电硅橡胶上的压力发生变化时,导电微粒之间的相对位置发生变化,导电通道的数量就发生了变化,从而改变导电硅橡胶材料的电阻大小[7]。导电硅橡胶材料的导电机理可以用有效介质理论方程来解释[8]。导电硅橡胶材料的电阻R可写为
式中:F为材料受到的外界压力大小;R0为压力为零时材料的初始电阻;ϕ0 为压力为零时硅橡胶材料中导电微粒的体积分数;ϕc 为临界渗流阀值;τ为材料的渗流系数;υ为材料的泊松比;E为材料的杨氏弹性模量。
通过式(1)可以得出,导电硅橡胶的电阻与其受到的压力大小成函数关系,故可以通过电阻的大小来反映导电硅橡胶材料受到的压力大小。
1.2 电阻层析成像原理
电阻层析成像的原理为:不同物质电导率一般不同,同一种物质在不同状态下电导率也不同,在被测物体周围添加一定大小的激励电流,其内部会产生电场,从而可以获得被测量物体的敏感场信息[9]。当被测物体内部电导率发生变化时,其敏感场也会发生变化,从而导致边界电压发生改变,因此可以通过测量边界电压重构物体内部电导率变化[10]。即,通过反演算法,可以将被测物体内部电导率分布以图像的形式进行显示,电阻层析成像原理如图2所示。

图2 电阻层析成像原理示意
2 压力测量传感器设计
2.1 测量系统组成
测量系统由测量模块、数据处理模块、图像反演模块3部分组成(见图3)。
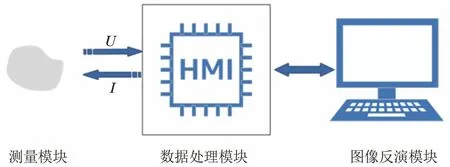
图3 电阻层析成像系统组成
测量模块主要用于压力感知,将16个测量电极均匀分布在导电硅橡胶周围,在相邻测量电极施加一定大小的激励电流,从而在导电硅橡胶内部获得敏感场分布;数据处理模块的主要作用是采集并处理测量到的边界电压。电压测量方式为:在相邻两个电极添加激励电流后,测量剩余相邻电极之间的电压。图像重建模块根据一定的反演算法,将测量得到的电压数据进行分析计算,最终以图像的形式显示被测物体内部电导率的分布情况。
2.2 压力测量可视化
实现压力测量可视化需要完成电阻层析成像的正、逆问题求解,其正问题为已知导电硅橡胶材料的电导率、激励电流大小,求得导电硅橡胶材料的边界电压、敏感场分布[11];逆问题为通过测量得到的导电硅橡胶的边界电压,利用反演程序求得硅橡胶的电导率分布,进而以图像形式显示材料所受压力的大小及位置[12]。
2.2.1 正问题
以被测对象中心点作为零电势参考点,电阻层析成像正问题可以写为
式中:∇为梯度算子;σ为电导率分布;M为被测场域;J为注入电流密度;φ为敏感场内电势,被测对象中心点电势φ(x0,y0)为0。
被测场域边界电压为
式中:F(σ)以电导率分布σ为变量的函数;V为被测物体的边界电压[13]。
正问题求解方法包括解析法和有限元法两种,解析法对于电导率分布复杂的场域求解难度大,很难得到正确解析。因此,有限元法求解电阻层析成像的正问题应用越来越广泛。
有限元法求解电阻层析成像正问题将被测对象离散化,将其划分成若干个离散单元,划分的单元越小,求解的精度就越高,但计算量会随着单元的增加而增加。单元通常取三角形,且将每个单元内的电导率设为常数,则正问题可以表示为
式中:F e(φ)表示被测对象被划分成若干个单元后,每个单元以敏感场内电势φ为变量的函数;e为划分的每一个单元;m为划分的单元数[14]。
将场域离散为m个单元之后,通过线性插值得到每一个单元的电势,即
式中:a,b,c的值由单元节点坐标和电势决定,根据单元的离散关系得到单元矩阵[15]。
当电导率σ已知时,可以求出每一个单元的电势,即
当被测物体的电导率由σ变为σ+Δσ时,测量电极上的电压变成V+ΔV,对V+ΔV进行泰勒展开得到
式中:o表示高阶无穷小。
高阶项(Δσ)2被忽略,式(7)经过线性化、离散化后为
式中:S为灵敏度矩阵。
假设将被测对象划分成m个单元,获得边界电压n个,单元内电导率不变,则每个单元与图像中的一个像素对应,将式(8)先进行离散化后,再进行归一处理,正问题的求解可以变为
式中:U为测量电压矢量;g为电导率分布矢量,即像素灰度[16]。
笔者在MATLAB软件中求解电阻层析成像正问题,首先对被测对象场域进行离散化,将其划分为多个三角形单元。分别在(1,2);(4,5);(7,8);(10,11);(13,14);(16,1)成对电极间添加激励电流时,不同激励下的敏感场电势分布如图4所示。

图4 不同激励下的敏感场电势分布
2.2.2 图像可视化
图像可视化即逆问题求解,电阻层析成像逆问题是图像重建的关键,逆问题的求解方法包括非迭代算法和迭代算法,非迭代算法精度较低,因此应用较少,在逆问题计算中,经常采用迭代算法进行求解。根据电阻层析成像的正问题可以将其逆问题归纳为
即求解逆问题为求解正问题中雅可比矩阵的逆矩阵[17],即
Land weber迭代算法为最常见的迭代算法[18],Land weber算法求解逆问题可以归纳为
逆问题反演得到的图像中每一个单元对应一个像素,单元中像素用不同的颜色来表示,可以通过观察图像颜色反映的被测场域电导率分布,进而得到被测物体受到的压力大小,实现压力可视化测量。
3 试验验证
3.1 试验方法
笔者采用具有压阻效应的导电硅橡胶材料作为压力测量的传感单元,其直径为10 m,厚度为1 m,工作温度为-45~60℃,体积电导率为500Ω·m,表面电导率为31 000Ω·m。
测量电极为紫铜圆形电极,直径为5 mm,厚度0.3 mm。导电硅橡胶与测量电极之间采用导电胶固定,其体积电导率为0.04Ω·m,测量单元实物如图5所示。

图5 测量单元实物
在导电硅橡胶边界沿圆周方向均匀布置16个测量电极,采取相邻激励、相邻测量的方式,在一次测量过程中,分别给相邻电极添加激励电流,测量其余相邻电极的边界电压,16个电极共可获得208组测量数据。电流激励和电压测量顺序如表1所示。

表1 电流激励和电压测量顺序
将采集到的208组电压数据在MATLAB软件中利用Landweber迭代算法进行图像重建,最终得到导电硅橡胶材料在受到不同压力时的电导率分布情况,即其所受压力的分布情况。
3.2 试验结果
利用可视化压力测量系统分别测量硅橡胶材料在不同压力作用下、不同区域受力时的图像重建情况。
图6(a)~(c)分别为导电硅橡胶材料中间区域受到2,5,10 N 压力作用时的示意图、反演图像、网格图像、测量电压。由图6可以看出,硅橡胶材料中间区域受到不同压力时,压力测量系统能够准确还原受力区域,且能够反映受力大小。
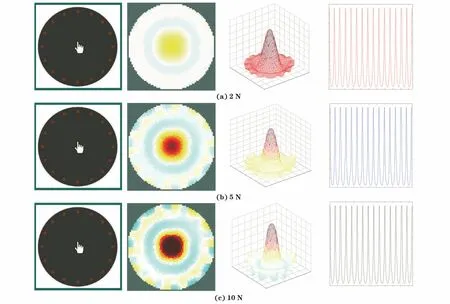
图6 硅橡胶材料中间区域受力时压力重建图像
硅橡胶材料边缘区域分别受到不同压力作用时重建后的相关图像如图7所示。图7(a)~(c)分别为导电硅橡胶材料边缘区域受到2,5,10 N 压力作用时的示意图、反演图像、网格图像、测量电压。由图7可以看出在硅橡胶材料边缘区域受到不同压力时,压力测量系统能够准确还原受力区域,且能够反映受力大小。

图7 硅橡胶材料边缘区域受力时压力重建图像
硅橡胶材料在两侧同时受到相同压力时,改变两侧压力大小时,重建后的相关图像如图8所示。图8(a)~(c)分别为导电硅橡胶材料两侧同时受到2,5,10 N压力作用时的示意图、反演图像、网格图像、测量电压。由图8可以看出,在硅橡胶材料两侧同时受到相同压力时,并且改变压力大小后,压力测量系统能够准确还原受力区域,且能够反映受力大小。

图8 硅橡胶材料边缘区域受力时压力重建图像
4 结语
提出一种基于电阻层析成像技术的整体式、可视化压力测量传感器。结合导电硅橡胶材料的压阻效应,通过求解正、逆问题,达到了实时显示压力大小、受力区域的目的。
以导电硅橡胶材料作为测量单元,基于电阻层析成像技术对其进行压力测量,在物体受到0~10 N压力时,能够正确显示受力区域和压力大小,且压力较小时图像重建质量更高。
该传感器采用整体硅橡胶材料作为测量单元,无需做成多个复杂的传感器阵列,结构简单,性能可靠,对于新型力触觉传感器的研究具有一定指导作用。
