基于滑模变结构的虚拟总轴控制策略研究
2023-12-05肖园园张墩利李晔
肖园园 张墩利 李晔

摘要:印刷过程中高精度的套印取决于预套准阶段对调节辊的精准定位。针对摩擦对套印精度的影响,以及扰动对同步精度的影响,提出了基于滑模变结构的虚拟总轴控制策略,并利用李亚普诺夫函数证明了该控制算法的稳定性。实验结果表明所提出的控制策略不但能够有效的扰动及预套准阶段摩擦对系统跟随性能的影响,而且能提高无轴传动印刷机的同步控制精度。
关键词:预套准 套印精度 摩擦 虚拟总轴 滑模变结构
中图分类号:TP273 文献标识码:A
Research on the Strategy for Virtual-Shaft Control Based on Sliding Mode Variable Structure
XIAO Yuanyuan ZHANG Dunli LI Ye
(Hunan Open University, Changsha, Hunan Province, 410004 China)
Abstract: High-precision overprinting during printing depends on the precise positioning of the adjustment roller during the preregistration phase. Aiming atthe influence of friction on registering precision and the influence of disturbance on synchronous precision, this paper puts forward the strategy for virtual-shaft control based on sliding mode variable structure, and proves the stability of the control algorithm by using the Lyapunov function. The experimental results demonstrate that the control strategy proposed by this paper can not only effectively disturb the influence of fiction on the following performance of the system in the preregistration stage, but also improve the synchronous control accuracy of the shaftless driving printing machine.
Key Words: Preregistration; Registering precision; Friction; Virtual line shaft; Sliding mode variable structure
无轴传动技术广泛应用于新能源汽車、数控机床、印刷、造纸、纺织、冶金等各个领域,其制成品又延伸到航空航天、轨道交通、海工装备等高端装备制造领域,对于保卫国防安全和百姓安居乐业具有重要意义[1]。无轴传动技术被应用在工业生产中的关键在于,如何设计合理的同步控制策略,来克服生产过程中非线性和干扰对同步精度的影响。
为了弥补主令控制存在的不足,Lorenz 和Meyer在1999年提出了电子虚拟总轴控制方法,Valenzuela 和Lorenz对其做了进一步的发展[2]。为了模拟机械总轴的物理特性,在主令控制的基础上,虚拟总轴控制引入了主令控制缺少的扭转力矩反馈环节,从而具有与机械总轴相似的固有同步特性,因而被广泛应用于实际工程中[3]。
无轴传动印刷机主要通过独立驱动的伺服电机带动各印辊进行同步协调运行,在出现色差时进行套准控制[4],这就使得系统对多轴同步控制提出更高的要求。滑模变结构控制是一种不连续非线性控制,在滑模面上运动时系统具有比鲁棒性更加优越的不变性[5,6]。加之算法简单、实时性强、易于工程实现,其在高精度跟随控制中的应用引起了极大的关注[7]。
摩擦是影响无轴传动印刷系统低速性能的重要因素,它不但生成稳态误差,影响套准精度还会使系统出现振荡。本文针对摩擦对套印精度的影响,以及扰动对同步精度的影响,提出了基于滑模变结构的虚拟总轴控制策略,并利用Lyapunov定理证明了该算法的稳定性。在Matlab实验平台上对包括虚拟主轴在内的四轴凹版印刷系统进行了仿真验证,实验结果证明了基于滑模变结构的虚拟总轴同步策略的有效性。
1 系统的数学模型
2 多轴同步系统的设计
在无轴传动印刷机的同步控制系统中,除了要设计有效的同步控制算法保证单轴伺服系统的跟踪精度和鲁棒性能外;还必须考虑各个轴之间精确同步的要求,即保证各个轴之间的速度同步和位置同步(即协同控制)。
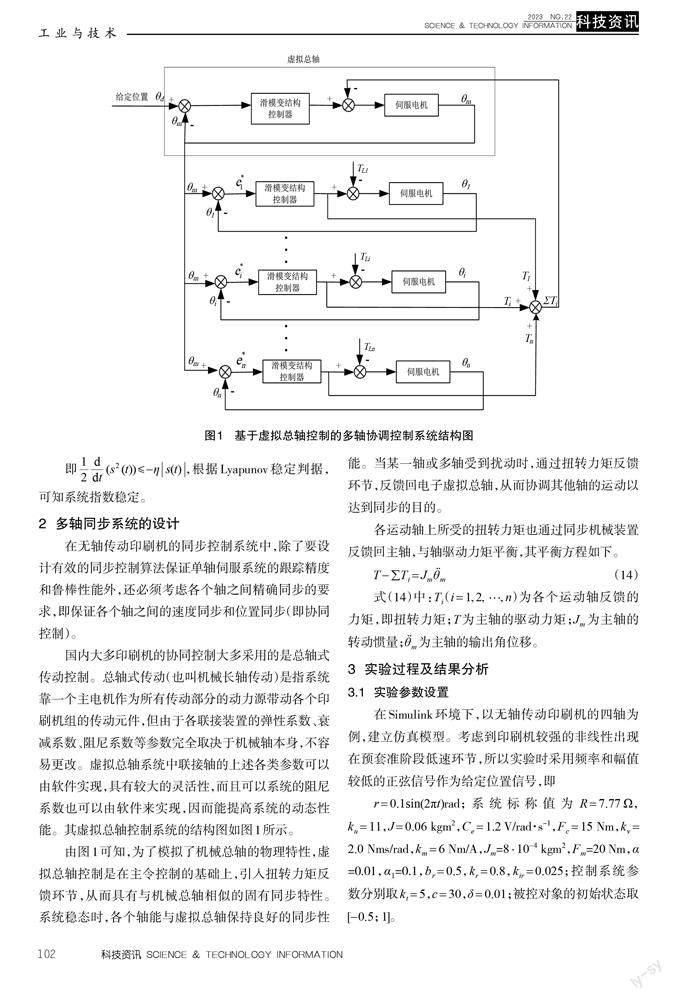
国内大多印刷机的协同控制大多采用的是总轴式传动控制。总轴式传动(也叫机械长轴传动)是指系统靠一个主电机作为所有传动部分的动力源带动各个印刷机组的传动元件,但由于各联接装置的弹性系数、衰减系数、阻尼系数等参数完全取决于机械轴本身,不容易更改。虚拟总轴系统中联接轴的上述各类参数可以由软件实现,具有较大的灵活性,而且可以系统的阻尼系数可以软件,因而能提高系统的动态性能。其虚拟总轴控制系统的结构图如图1所示。
3 实验过程及结果分析
3.1 实验参数设置
3.2 实验结果分析
2s时在从轴1增加一个大小为5N·m的负载转矩,各轴的跟踪误差和同步误差如图2所示。滑模变结构控制器对从轴发生外部扰动仍然具有快速的跟踪性能,且同步误差收敛速度快。仍然能够满足无轴传动印刷机高性能的要求。
上述仿真结果表明:虚拟总轴控制系统虽然以丧失系统跟随性能为代价,但系统获得了良好的同步性能,对于印刷设备,各个轴之间的同步更加重要。此外,滑模变结构控制器使系统在有扰动的情况下,仍能保持稳定的运行状态,提高了系统的鲁棒性能和同步性能。
5 结语
(1)针对无轴传动印刷机预套准低速运行阶段摩擦对套准精度的影响,提出了基于滑模变结构的虚拟总轴控制策略,提高了系统的套印精度,减小了系统的套印误差。
(2)针对干扰和非线性对印刷过程同步精度的影响,为每个轴设计了滑模变结构控制器,使得同步误差和跟踪误差在有限的时间内收敛于零。
(3)实验验结果证明了基于滑模变结构的虚拟总轴控制策略策略,能够有效改善低速预套准阶段摩擦对套准精度的影响,同时该控制策略有效改善了系统参数摄动及外界扰动对系统同步性能的影响。
参考文献
[1] 宋振飞.多电机无轴传动系统同步控制技术研究[D].济南:济南大学,2021.
[2] Perez-Pinal F J,Calderon G, Araujo-Vargas I.Relative Coupling Strategy[C].IEEE International Electric Machines and Drives Conference.Madison,2003:1162-1166.
[3] CHEN Y, DONG Z P, LIU C H. Combined Cross-Coupled and Electronic Virtual Line Shafting Control for Dual-Motor System[C]. IECON 2022 – 48th Annual Conference of the IEEE Industrial Electronics Society,2022: 1246-1250.
[4] 湯雨雷.多电机同步控制系统研究与设计[D].西安:西安工业大学,2019.
[5] SABANOVIC A. Variable structure systems with sliding modes in motion control a survey[J]. IEEE Trans. Industrial Informatics,2011,7(2): 212-223.
[6] 何奕恒.基于滑模观测器的不匹配系统故障降阶重构方法研究[D].株洲:湖南工业大学,2022.
[7] 袁敞,毕嘉亮,陈虎,等.多虚拟同步机系统的自适应滑模变结构控制方法[J].电力系统保护与控制,2023,51(8):26-36.
