悬挂式曲线送料平台的设计研究
2023-12-04孟兆新崔立松殷乐乐贾鑫宇
孟兆新, 崔立松, 殷乐乐, 王 猛, 贾鑫宇
(东北林业大学机电工程学院,黑龙江 哈尔滨 150040)
并联机构具有负载能力强、运动自由度高、高精度,以及重复性、失效容忍能力强等优点,使其在许多工程领域中得到广泛应用[1]。吴迎春等[2]优化了并联陶瓷三维打印机的结构,对其综合运动特性进行提升。刘娟等[3]选出2RPSRPR并联机构,用以满足多种工位需求。Niu Lianzhen[4]在肩关节外骨骼的结构体处采用并联机构,实现了很好的助力效果。房海蓉[5]使用新型并联铺带机器人机构用以满足翼型工件表面铺带需求。孙泽亮[6]应用六自由度并联机构构建跟踪系统,设计出一种全空域跟踪策略。Bao Xianqiang[7]设计一种新型的自适应并联机械臂,来调节超声探头的姿态,实现了3个自由度的位姿自动调整。
并联机构在木工机械设备领域也普遍存在。崔强强[8]搭建了五轴数控送料平台,实现工件自动进给,在林业机械加工中具有十分重要的意义。肖定福、曹甲甲[9-10]对并联式曲线送料平台进行误差分析,能有效提高工件运动精度。孟兆新等[11]利用数字孪生技术,对并联送料平台机构进行仿真分析,分析误差来源,为设备调试提供理论支撑,对生产实际有重要意义。
本研究开发的悬挂式细木工带锯机曲线送料平台是一种新型结构,是通过采用X、Y轴向平移及绕Z轴旋转三轴联动的工作台配合固定的锯条来实现木质工件的曲线锯切。该送料平台采用与锯身分离的方式,避免了因锯身振动导致加工精度不高的现象,同时将送料平台变为三轴联动,有效地减少了各个构件存在的制造误差、构件的安装误差、运动副间隙等机构误差,提高了并联式曲线送料平台在木工机床进一步应用的价值。
1 送料平台结构的实现
1.1 带锯机曲线锯切原理
当利用带锯机在板材工件上进行曲线锯切加工时,依靠X和Y两个坐标方向的位移只能够实现锯切点的曲线移动,无法实现带锯机的曲线锯切。这是因为带锯条是柔性的无端钢带,在上、下两个锯轮的张紧作用下工作,仅在宽度方向有着一定的刚度,无法承载侧向的扭转力。曲线锯切加工时,由于锯带具有一定的宽度,而锯路宽度又十分有限,只依靠X和Y两个方向的联动控制,必然会出现锯切加工面与锯条背部接触、相互挤压的现象,使锯条发生扭曲变形,无法进行后续加工,甚至还会造成锯条脱落或断裂等安全事故。因此,在数控曲线锯切送料过程中,工件在做X和Y两个方向的位移运动的同时,还要相对于锯条做一定角度的偏转,以保证锯条与加工曲线始终相切。
1.2 送料平台结构设计
悬挂式细木工带锯机送料平台是通过三轴联动来实现带锯机的仿人工曲线锯切。如图1所示,该送料平台主要由三大部分组成:X轴平移机构,Y轴平移机构以及偏转机构。偏转机构由偏转机构底座、推动滑块A和B以及两根连杆所组成。X轴平移机构、Y轴平移机构以及偏转机构均由数控系统通过步进电机来进行精密控制,使加工工件不断地根据曲线的走向进行转动,调整角度,保证锯条沿着加工曲线的切线方向切割。
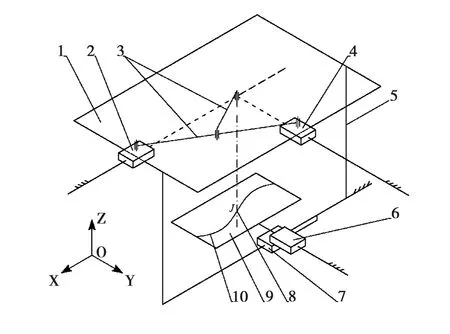
图1 送料平台机构简图1.偏转机构底座;2.推动滑块A;3.连杆;4.推动滑块B;5.悬挂架;6.Y轴平移机构;7.X轴平移机构;8.锯切点;9.动平台;10.加工曲线
悬挂式细木工带锯机送料平台各主要结构位置分布及功能:
①图1中加工曲线10是工件上锯切加工的目标曲线,在此可代表工件的位置状态,工件固定在动平台9上,可随着Y轴平移机构移动,实现工件的Y向进给;
②Y轴平移机构设置在X轴平移机构上方,在X轴丝杠的带动下,Y轴平移机构、动平台9以及加工曲线10沿X方向运动,可实现工件的X向进给;
③偏转机构位于上方X轴平移机构以及Y轴平移机构的上方,将两平移机构用悬挂架与偏转机构底座相连接,置于空中。在偏转机构底座上方设置两个推动滑块A与B,推动滑块A在丝杠的带动下,沿轨道移动,带动连杆另一端的推动滑块B移动,同时带动偏转机构底座做相应的偏转,继而实现Y轴平移机构、X轴平移机构以及动平台整体绕着锯切点J进行偏转。
2 送料平台模型的建立及分析
2.1 曲线送料平台的机构分析
悬挂式送料平台机构主要由两部分组成:上部的偏移机构和底部的XY正交平移机构。
①偏移机构
这是一个单自由度的平面机构,其结构简图如图2。
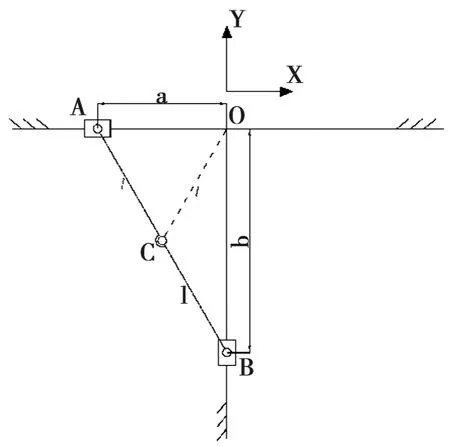
图2 偏转机构结构简图
该机构的构件总数N=4,活动构件数n=3,2个移动副、2个转动副,没有高副。由此可得此机构的自由度数为:F=3n-2PL-PH=3×3-2×4-0=1,其中PL为低副个数,即转动副和移动副的总个数;PH为高副个数。
驱动滑块A,通过连杆使滑块B实现相应的运动,即可实现偏转机构底座做相应的偏转,继而实现Y轴平移机构、X轴平移机构以及动平台整体绕着O点的旋转运动。
②XY正交平移机构
XY正交平移机构是一种非常简单且常用的机械机构,由两个互相垂直的平移机构所组成,可实现板材工件在平面上的二维平移。
2.2 曲线送料平台的逆解建模
设目标曲线方程为:y=f(x),锯切点在曲线上,其坐标为(x0,y0),因此在锯切点该处切线的斜率为k=f′(x),又斜率等于动平台转θ的正切值,即f′(x)=tanθ。所以偏转机构动平台转角θ的计算公式如式(1):
θ=arctanf′(x)
(1)
对于偏转机构,利用串联机构空间位姿结算算法对连杆末端位姿进行计算。在轨道建立基准坐标系M0(O0-X0Y0Z0),在推动滑块A处建立坐标系M1(O1-X1Y1Z1),在锯切点在偏转平面的投影中心建立动坐标系lX,lY,lD,lE,lF,如图3、图4、图5所示。

图3 偏转机构坐标系三视图
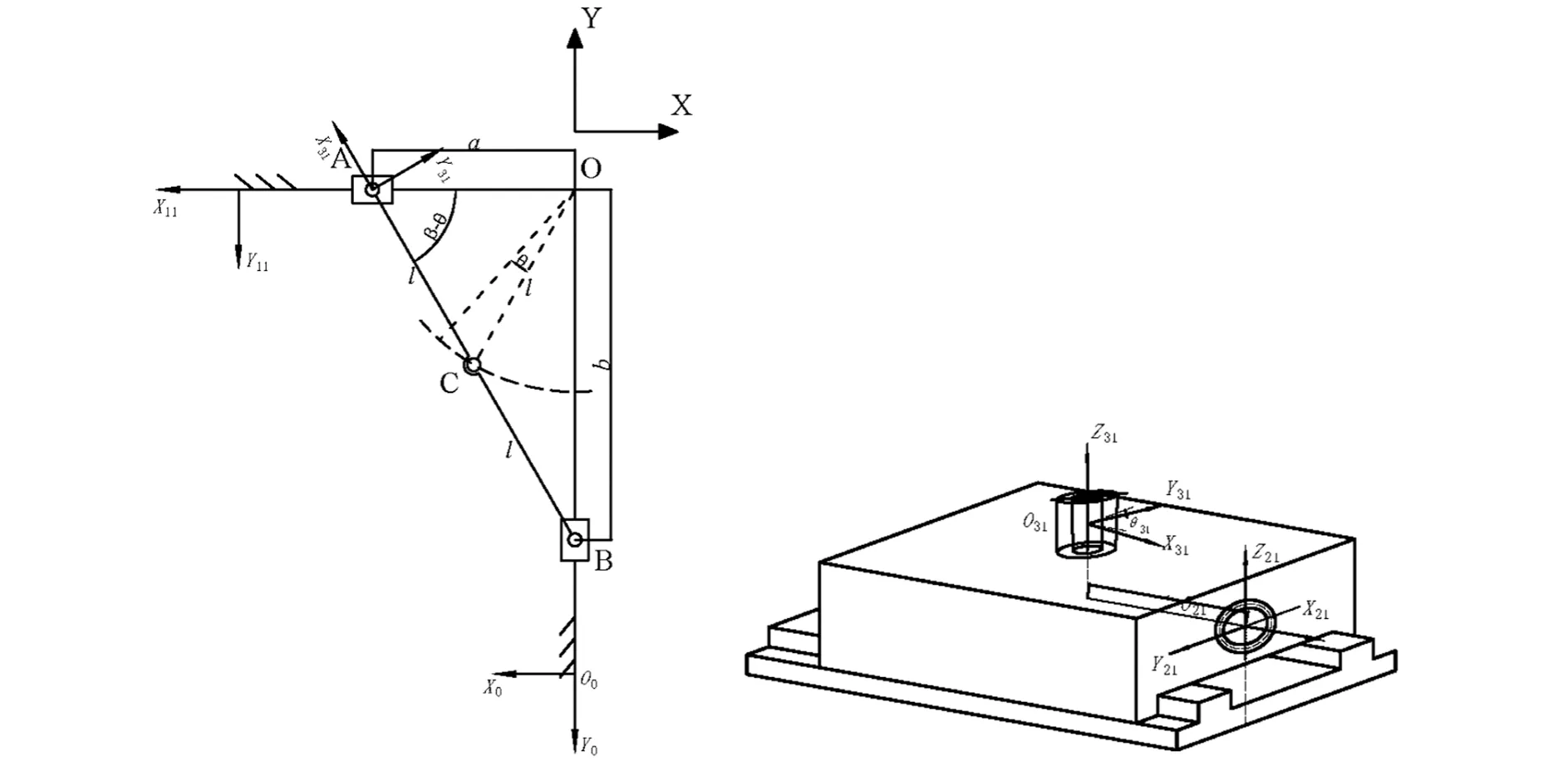
图4 偏转机构坐标系图 图5 偏转机构推动滑块坐标系图
根据机构空间位姿结算算法的原理,运动平台动坐标系M0′相对于基准坐标系M0的姿态角旋转变换矩阵为:
(2)
式中α、β、γ分别为动坐标系M0′相对于基准坐标系M0绕X轴、Y轴、Z轴旋转的角度。

(3)
由该偏转机构结构可知,运动坐标系相对于静坐标系旋转运动只有绕Z轴的旋转运动,设M1及M0′相对于基准坐标系M0绕Z轴的旋转角度分别为θ1、θ,可得各运动关节动坐标系M1及M0′相对于基准坐标系M0的旋转矩阵如下:
以静坐标系M0为基准,动坐标系M1的旋转矩阵为:
(4)
以静坐标系M0为基准,动坐标系M0′的旋转矩阵为:
(5)
O为锯切点,连杆AB长度为2l,其中AC=CB=l;AO=a,BO=b。所以推动滑块A位姿数学模型:
(6)
当某时刻CO绕O点旋转的夹角为θ时,则
xA=-2lcos(β-θ)
(7)


图6 正交平移机构(XY轴)模型图
由偏转机构位姿建模方法计算同样可以得到正交平移机构的两条支链的位姿数学模型。
X轴支链位姿数学模型:
(8)
Y轴支链位姿数学模型:
(9)
式中c1为X轴推动滑块端面螺纹中心与滑块连接中心的水平距离;c2为Y轴推动滑块端面螺纹中心与滑块连接中心的水平距离。
根据坐标系旋转变换关系可得:

(10)
在工件上建立直角坐标系,以初始时刻被加工工件与O点的重合点为原点,分别以XY正交平移正方向为x轴、y轴。已知目标曲线的方程为:y=f(x),锯切点在曲线上,其坐标为(x0,y0)。因为偏转机构带动XY正交平移机构绕O点旋转θ,所以锯切加工时X、Y方向上进给量分别为aX、aY,则:
(11)
综上,可得到整个机构在工作过程中各个轴向的进给量:
(12)
方程组(12)即为该模型的位置方程组,将偏转角θ与加工曲线y=f(x)的关系式代入方程组,便可利用加工曲线y=f(x)求解各轴的输入位移。分别将输入位移方程组中的方程对时间求导,进而可以得到各轴滑块的进给速度和加速度。将各运动参数输入工控计算机,便可实现对工件的曲线锯切。
3 基于数字孪生的仿真验证
对物理实体精确映射的数字孪生模型进行建立后,为了验证数字孪生模型的有效性和正确性,实现对仿人工曲线送料平台的虚拟调试,则需利用数字孪生模型进行仿真模拟。悬挂式细木工带锯机送料平台切削系统数字孪生模型如图7所示。
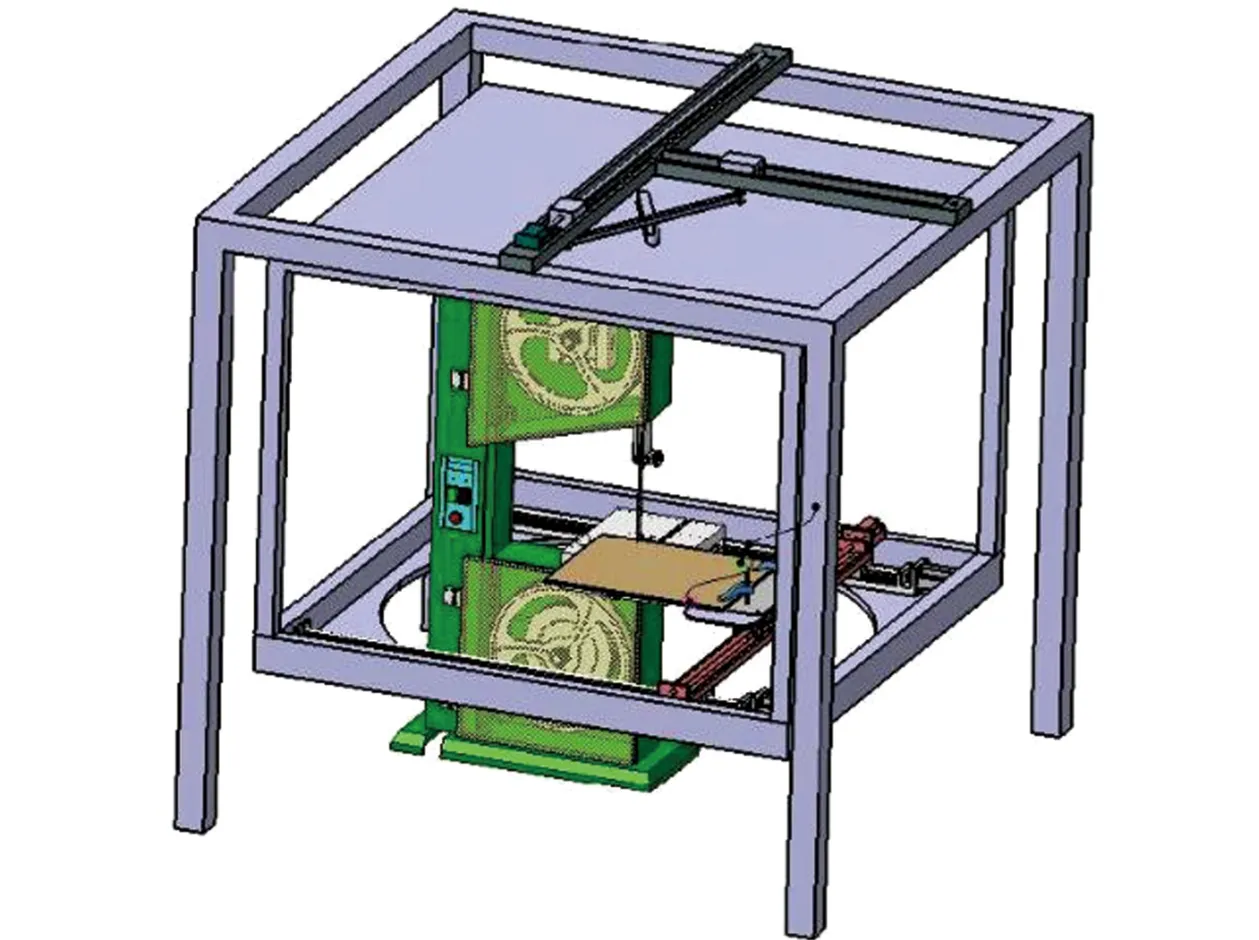
图7 悬挂式细木工带锯机送料平台切削系统数字孪生模型图
3.1 理想条件的姿态仿真
利用机械多体运动学与动力学模型在理想条件下进行姿态仿真,验证模型机构合理性,得到各运动轴滑块的理想位移曲线和动平台理想位移曲线和理想偏转角度曲线。
姿态仿真前,首要步骤是确定加工曲线,将加工曲线设为f(x)=20sin(0.005πx)。设正交平移机构X方向进给速度为vX,则加工曲线可拆分为关于时间t的参数方程,如式(13)所示。
(13)
并且,偏转机构的转角θ也可建立与时间t和正交平移机构X方向进给速度vX的关系式。
θ=arctan[0.1πcos(0.005π×vXt)]
(14)
正交平移机构X方向初始进给速度取值为10 mm/s,工件的长度为380 mm,宽度为300 mm。仿真过程中,被加工工件将沿着加工曲线的轨迹移动。在完成运动仿真之后,对各运动轴滑块的相关参数进行测量,得到各轴滑块的进给位移曲线和进给速度曲线,如图8~11所示。

图8 推移滑块A的进给位移和进给速度变化曲线图

图9 动平台偏转角度随时间变化曲线

图10 X轴滑块进给位移和进给速度变化曲线
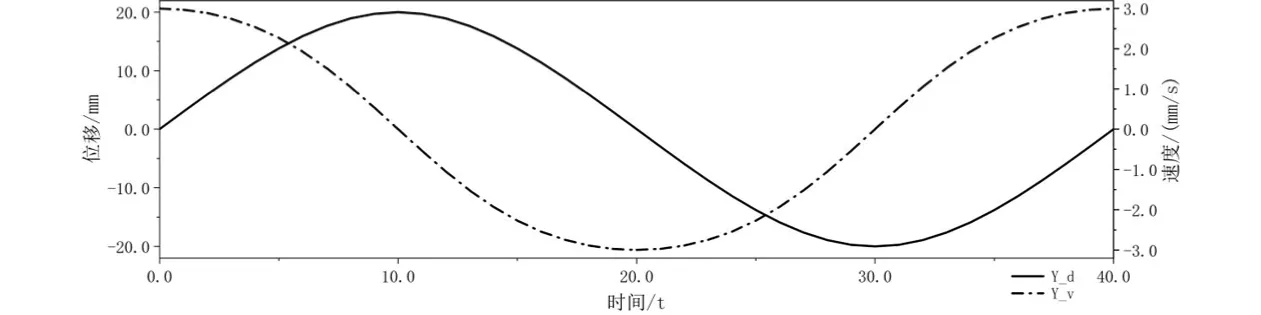
图11 Y轴滑块进给位移和进给速度变化曲线
通过理想条件下的姿态仿真,得到各轴运动轴滑块的位移与速度曲线,以及动平台的转角曲线。从上述曲线图中可以看出,运动曲线平滑过渡,没有重叠曲线,没有因过大的突变而出现的锯齿状曲线,验证了模型机构的合理性。
3.2 送料平台加工实验验证
在得到各个滑块进给量曲线之后,通过spline工具将曲线直接离散成各个点,提取到各点的数值,并构造相应的spline函数,将各个滑块的驱动函数输入到电气控制柜中,建立PC机与智能加工系统的数据连接,进行加工实验。实验所用细木工带锯机的型号为MJ345E,板材几何参数为380 mm×300 mm×12 mm,在偏转机构中推动滑块A直线滑台模组的有效行程为1000 mm,组成正交平移机构的两套直线滑台模组的有效行程为600 mm,驱动直线滑台模组的电机均为伺服电机。理想加工曲线与测量实际锯切轨迹曲线如图12所示,实际加工曲线与理想加工曲线对比误差不超过5 mm。

图12 加工曲线图
4 结论
本文设计了悬挂式细木工带锯机送料平台新型机构,对其进行机构设计以及模型建立分析;建立其数字孪生模型并进行姿态仿真,以验证模型机构的合理性;对其进行加工实验验证,其加工曲线与理想曲线的误差范围在5 mm以内。该三轴送料平台能够通过数字控制实现自主送料,完成木材工件仿人工曲线的锯切,可以大大降低人力资源的使用,减少企业人力成本支出,避免出现工伤事故。同时,该三轴送料平台相对于其他现有结构来说,具有结构简单,成本低,具有更高的刚性和稳定性,易于编程和操作等优点,在木材加工制造业具有广阔的前景。
