三叉杆式万向联轴器的平均传动效率分析
2023-11-30缪兴龙
缪兴龙
(南京钢铁集团冶金铸造有限公司,江苏 南京 211500)
0 引言
目前,三叉杆式万向联轴器在我国市场内的应用范围较广,但万向联轴器受作业环境中因素的干扰,出现轴间夹角变化不规律的问题。在此种条件下,装置的运行将出现相对滑动与相对摩擦,加剧装置在运行中的噪声与振动[1]。同时,装置运行中产生的滑动摩擦还会对其综合性能造成影响,进一步增加装置的运行能耗,最终导致装置的传动效果劣化等负面效果。尽管针对万向联轴器的运动补偿研究成果较多,但大部分研究均未能考虑到装置内不同构件在实际运行中的相互约束条件,导致设计的方法或研究的成果无法作为反应装置各个构件运行工况的主要条件[2]。而要实现对此方面研究成果的优化,提高万向联轴器的实用性,应结合此装置的实际使用情况,对其运行中运动性能展开研究,并以此为依据,分析并计算装置的特性。为落实此项工作,以三叉杆式万向联轴器为例,设计一种针对此装置的传动效率分析方法,以此种方式,掌握联轴器的传动运行规律。
1 万向联轴器的平均传动效率分析方法设计
1.1 建立三叉杆式万向联轴器运动方程
为实现对联轴器平均传动效率的精准分析,应在开展相关研究前,明确联轴器的构成,并以此为依据,建立针对三叉杆式万向联轴器的运动方程[3]。在此过程中,使用三维绘图软件,对联轴器中的不同实体结构进行建模,提取各个节点信息,建立三叉杆式万向联轴器的空间结构模型,模型结构图如图1 所示。
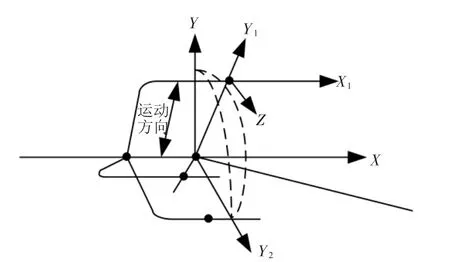
图1 三叉杆式万向联轴器的空间结构模型
图1 中,X、Y、Z 表示三叉杆式万向联轴器的三维空间结构分项,X1表示联轴器横向运动分项,Y1与Y2表示联轴器纵向运动分项。
在此基础上,引进三维建模软件中的余弦矩阵工具,根据联轴器的运动方向,采用空间坐标轴变换法,建立针对此装置的运动方程[4]。方程表达式如下。
公式中:r 为万向联轴器旋转半径;L 为万向联轴器有效转动距离;δ 为装置前端输入运动角度;φ 为装置前端输出运动角度;e 为装置偏转角度。按照式(1)—式(3),完成对三叉杆式万向联轴器三个对应方向运动方程的构建。
1.2 万向联轴器滑块滑动速度计算
完成上述设计后,考虑到三叉杆式万向联轴器在运动过程中滑块的滑动距离是不断发生变化的[5]。在此种条件下,万向联轴器滑块滑动距离、滑块偏转角度与滑块回转角度之间存在下述关系。
式中:l 为万向联轴器滑块滑动距离;γ 为滑块偏转角度;β 为滑块回转角度;λ 为滑块沿着滑道的相对速度。参照式(4),将万向联轴器滑块的滑动中心定义为N,此时,相对N 的万向联轴器滑块滑动速度可用式(5)进行计算。
式中:v 为万向联轴器滑块滑动速度;N 为滑块的滑动中心相对位移量;ω 为滑块滑动过程中的角速度。按照式(5),完成对万向联轴器滑块滑动速度的计算。
1.3 基于摩擦功率损失分析的联轴器平均传动效率
考虑到万向联轴器在传动运行过程中,滑块与三叉杆臂之间将产生相对滑动摩擦,此种摩擦会消耗装置自身的传动,并损失装置传动功率。因此,在进行万向联轴器的传动效率计算前,还需要结合其实际运行情况,进行装置摩擦损失功率的计算。计算公式如下:
式中:F 为三叉杆式万向联轴器摩擦损失功率;p 为滑块与导向结构之间的正向压力;T 为输出转矩;α 为滑块上部结构的荷载。掌握装置运行的摩擦后,按照下述计算公式,进行联轴器平均传动效率的计算。
式中:η 为联轴器平均传动效率;P1为三叉杆式万向联轴器单位时间内的输出功率;P2为联轴器在单位时间内的输入功率。按照此种方式,完成对传动效率的计算,将计算结果与统计时序进行匹配,得到针对此三叉杆式万向联轴器的平均传动效率。
2 实例应用分析
上文从三个方面完成了针对三叉杆式万向联轴器的传动效率分析方法设计,为检验本文设计方法的可行性,下述将与某大型机械生产单位作为此次实验的测试参与单位,通过实例检验的方式,进行方法的实用性检验。试验开始前,通过与参与方的交涉,选用由某大型科技有限公司提供的HTJI-150000 型号三叉杆式万向联轴器作为测试对象,获取此装置在实际应用中的相关技术参数,如表1 所示。
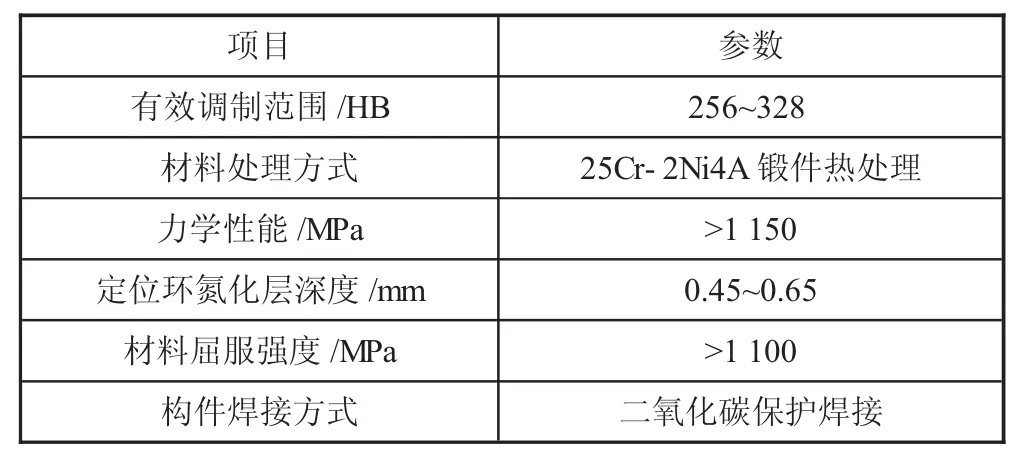
表1 HTJI-150000 型号三叉杆式万向联轴器技术参数
完成对本文研究对象基本情况的分析后,决定采用本文设计方法对此联轴器的传动效率展开分析。分析过程中,结合实际情况,建立针对此三叉杆式万向联轴器的运动方程。同时,通过对装置滑动滑块与中心结构运动的合成,计算万向联轴器滑块滑动速度。在此基础上,分析联轴器在运行过程中出现的摩擦,进行装置摩擦功率损失的分析,以此为依据,即可实现对联轴器平均传动效率的计算。
将万向联轴器平均传动效率计算结果与计算过程中的时序进行匹配。对比万向联轴器在运行中的实际传动效率,与本文方法计算得到的装置传动效率,通过此种方式,可以初步掌握本文设计的分析方法在实际应用中的可行性。连续不同时刻点下的传动效率可知,得到如图2 所示的折线图。
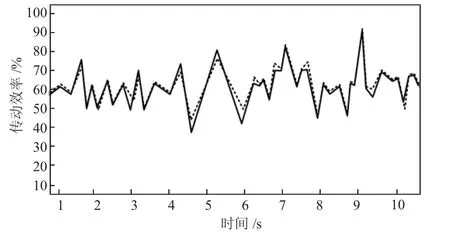
图2 联轴器传动效率分析结果
图2 中,实线表示三叉杆式万向联轴器在运行中的实际传动效率;虚线表示通过本文方法计算得到的不同时刻下装置传动效率。从图2 所示的测试结果中可以看出,使用本文设计方法进行万向联轴器平均传动效率的计算,得到的计算结果与实测结果基本重合,由此可以说明本文设计方法对装置传动效率的计算较为准确。
在此基础上,选择5 个不同型号的万向联轴器作为测试对象,按照式(7)进行联轴器平均传动效率的计算,统计计算结果与真实结果,将其作为此次实验的测试结果,如表2 所示。
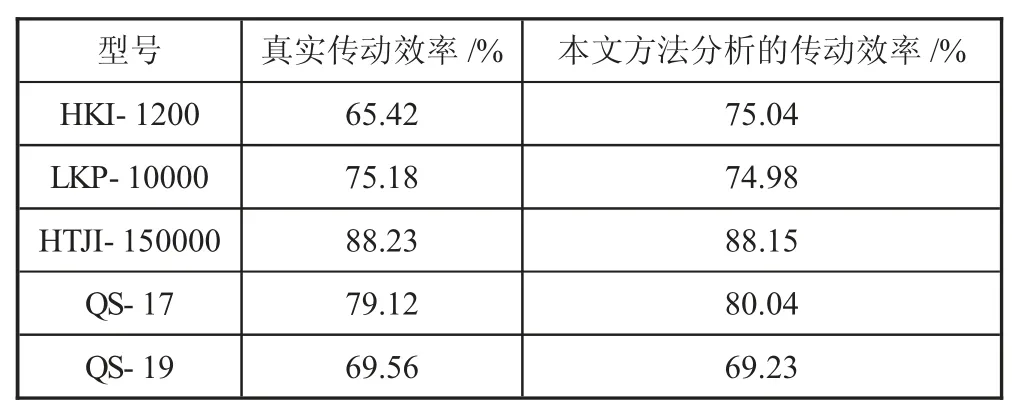
表2 三叉杆式万向联轴器平均传动效率
从上述表2 所示的实验结果可以看出,使用本文设计方法进行联轴器平均传动效率的计算与分析,可以将效率计算结果误差控制在1.0%范围内。
3 结语
联轴器是一种在双轴轴线存在夹角时仍可以保证双轴同步旋转的装置,此装置主要应用在机械工程学等相关领域,此装置在实际应用中,具有结构紧凑、荷载能力较强、操作简单等显著性优势。为进一步掌握此装置的运动特性,本文从建立三叉杆式万向联轴器运动方程、万向联轴器滑块滑动速度计算、基于摩擦功率损失分析的联轴器平均传动效率三个方面,对联轴器的平均传动效率展开计算分析,以期通过此种方式,为装置后续在市场内的推广使用提供进一步的技术指导与帮助。