以提升机组电压稳定性为目标的风电场无功电压协调控制
2023-11-29刘志强窦宇宇
刘志强,窦宇宇
(国网内蒙古东部电力有限公司电力科学研究院,呼和浩特 010010)
0 引言
为提高风电机组的多场站短路比[1],新建风电场往往配置分布式调相机[2-4],站内无功补偿设备类型增多,包括风电机组、静止无功发生器(Static Var Generator,SVG)、分布式调相机和电容器,无功调整能力增强。目前风电场一般都配有自动电压控制(Automatic Voltage Control,AVC)系统[5-7],根据调度下发的电压指令,考虑站内各类无功电源和母线的实时数据,结合各种约束条件,计算出各类无功电源的无功出力,通过闭环调节来满足调度端并网点母线电压要求。由于风电机组的功率因数在±0.95范围内动态可调,很多风电场将风电机组也纳入AVC 的可调节资源。该举措可有效利用机组的无功资源,但未充分考虑机组的电压稳定性,导致实际应用中重复出现进出高低电压过渡的现象,严重影响机组的稳定运行。另外,对于多种类型的无功电源,现有协调控制策略往往仅以稳态无功需求为目标进行控制,未能有效发挥部分无功电源在抑制暂态过电压方面的优势。目前国内针对无功电压协调控制方面的研究往往局限于两种无功补偿装置之间,如调相机与特高压直流[8-10],风电机组与特高压直流[11],风电机组与SVG[12],调相机与静态无功补偿装置[13],暂时未综合考虑风电机组、SVG、分布式调相机以及电容器之间的协调控制。
针对上述问题,本文以提升新能源机组电压稳定性为目标,通过优化新能源机组的无功电压控制策略,即以保障机组机端电压在正常范围为最高优先级,提升机组稳态时电压稳定性;通过优化各无功补偿装置之间的协调控制策略,即充分利用分布式调相机和SVG的暂态性能优势,提升机组暂态时电压稳定性。
1 风电机组电压稳定性分析
1.1 机组稳态时电压稳定性分析
风电机组的运行状态与机端电压息息相关。当电网电压在标称电压的0.9(p.u.)~1.1(p.u.)时,风电机组连续正常运行;当电网电压低于标称电压的0.9(p.u.)或超过标称电压的1.1(p.u.)时,为保证不脱网,风电机组进入低电压或高电压过渡模式[14]。目前新投风电场装机容量大、风机数量多,机组往往与并网点的电气距离相对较远,机端电压易受220 kV 主变压器与箱式变压器分接头以及集电线路阻抗的影响,可能会存在并网点电压合格而机端电压越限问题,影响风电机组的稳定性。某新投风电场将风电机组纳入AVC可调节资源,实际运行中曾出现频繁进入/退出低电压过渡的问题,具体如下:在机端电压偏低情况下,仍收到AVC 系统不合理的吸收无功功率指令,导致机组进入低电压过渡模式。在过渡过程中,机组的动态无功支撑响应又使机组回到正常运行状态,然后继续执行AVC 指令,再次进入电压过渡模式,如此反复,对机组的稳定性造成很大的威胁。如图1 所示,机组稳态运行时机端电压为0.926(p.u.),收到AVC系统吸收无功功率的指令,机端电压持续下降,达到低电压过渡阈值,反复进出低电压过渡。对该过程的相电流进行快速傅里叶变换分析,发现存在次/超同步分量,谐波含量占比较大,影响机组的稳定运行。

图1 风电机组重复进出低穿模式Fig.1 Repeated entry and exit crossing mode of wind turbines
1.2 机组暂态时电压稳定性分析
由于新能源具有随机性、波动性、间歇性等特点,为实现无功电压稳定,系统需配置一定容量的动态无功补偿装置,通过动态平滑调整无功输出,实现并网点的电压稳定。作为同步旋转设备,分布式调相机既可为系统提供短路容量,也可提供强有力的动态电压支撑。当母线电压突变时,调相机无功响应:一是由调相机物理特性所引起的自发无功响应,即在电压变化的瞬间自然产生;二是由励磁系统产生的无功响应[15]。不计励磁条件,调相机在机端电压突变下的无功电流响应可用公式(1)表示。
式中:id为无功电流瞬时值;Eq[0]为空载电势;为暂态内电势;U0+为突变后机端电压;U0-为突变前机端电压;Xd为直轴稳态电抗;X′d为直轴暂态电抗;为直轴次暂态电抗;T′d为直轴暂态短路时间常数;T″d为直轴次暂态短路时间常数;Ta为定子绕组暂态时间常数;ω为同步角速度;δ0为短路前机组初相。
由式(1)可知,调相机在机端电压突变后瞬时无功响应主要与机端电压变化量和次暂态电抗有关,机端电压变化量越大,次暂态电抗越小,瞬时无功响应越大。以调相机典型参数为例,机端电压突变后无功功率响应如图2 所示。从图2 可以看出,不计励磁条件,机端电压跌落至0.6(p.u.)后,调相机自发产生超过1.5(p.u.)的无功功率,并逐渐衰减,这种无延时的无功响应是实现对电网电压有效支撑的最直接手段;计及励磁条件,在励磁控制器的作用下,调相机进入强励状态,无功功率逐渐增加,最大可达2.5(p.u.),因此调相机的短时过载能力更强,对系统无功支撑具有很大优势。
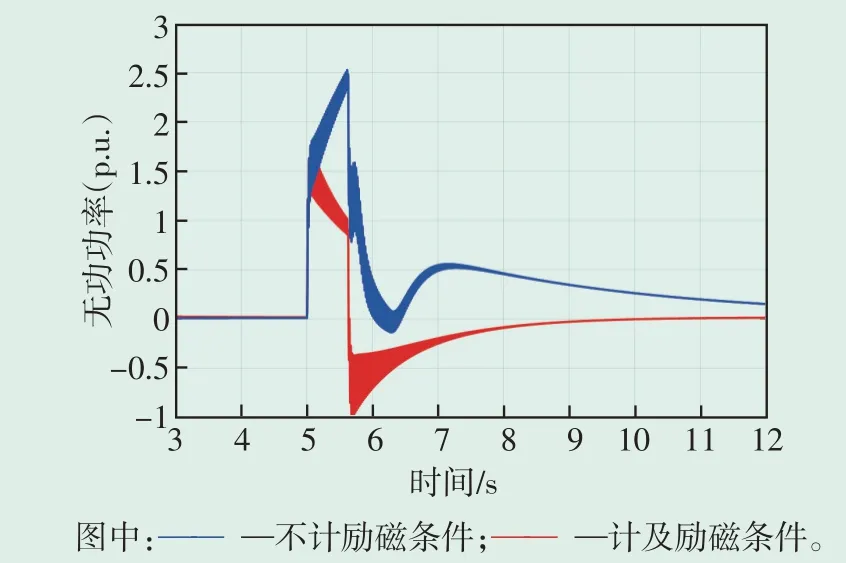
图2 分布式调相机无励磁控制系统的电压扰动响应Fig.2 The voltage disturbance response of the non excitation control system for distributed condensers
风电机组、SVG 等电力电子设备大扰动下无功响应能力受器件耐受能力制约,按照GB/T 19 963.1—2021《风电场接入电力系统技术规定第1部分:陆上风电》要求,无功电流大小需满足公式(2)[16],其中Iq不应低于1.05(p.u.),最大为1.3(p.u.),提供的无功功率最大为1.1(p.u.),如图3 所示。与调相机强过载能力相比,风电机组、SVG等电力电子设备的无功支撑能力相对较弱。
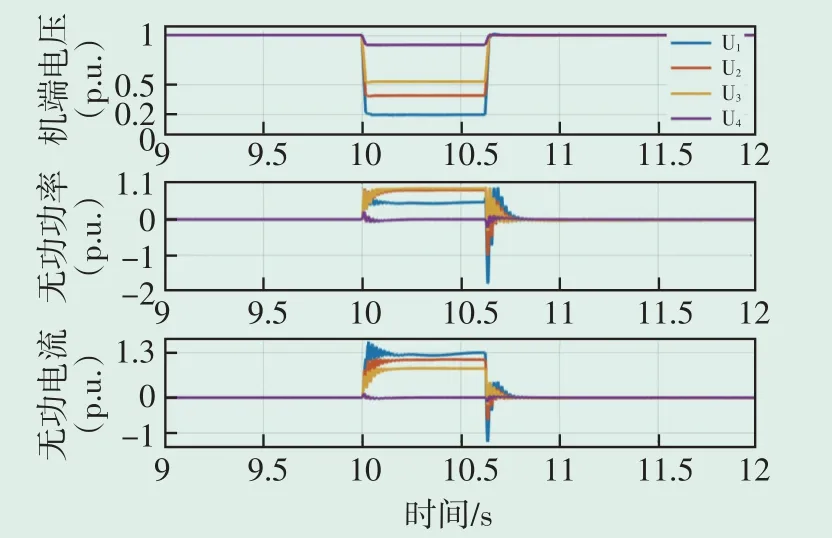
图3 风电机组在不同电压跌落工况下的无功响应Fig.3 Reactive response of wind turbines under different voltage drop conditions
式中:Iq为无功电流;Iq0为稳态运行时无功电流;K1、K3分别为低电压和高电压下的动态无功电流比例系数,K1取值应不小于1.5、宜不大于3,K3取值应大于1.5;Ut为电压标幺值;IN为额定电流。
2 提升机组电压稳定性的无功电压协调控制策略
2.1 机组稳态时电压控制策略
机端电压水平密切影响着机组的控制性能及稳定性,本文优先利用机组自身的无功调整能力,使机端电压运行在正常范围。即机端电压闭环控制优先级最高,当机端电压处于正常范围,机组执行AVC 系统下发的无功功率或定功率因数闭环控制;当机端电压越限,如低于0.92(p.u.)或超过1.08(p.u.),停止执行无功功率或功率因数闭环控制,而进行机端电压闭环控制,通过调整机组的无功出力,使机端电压恢复至正常范围,具体控制框图如图4 所示。若机组自身无功资源用尽,机端电压仍无法恢复至正常范围,则请求35 kV 侧无功资源协助调整。
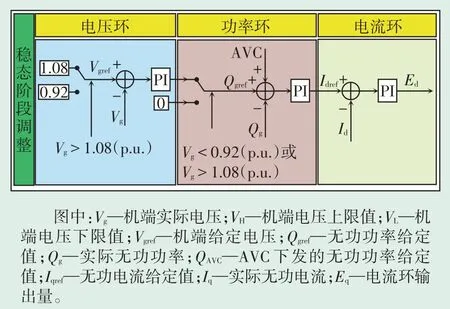
图4 机组无功电压优化控制策略Fig.4 Optimization control strategy for reactive power and voltage of units
2.2 机组暂态时电压控制策略
无功补偿装置分为动态型和静态型两种,其中静态型(电容器)只能固定容量投切,无法实现平滑输出,因此在无功电压控制中应优先采用动态型无功补偿装置。对于SVG和分布式调相机而言,由于分布式调相机的暂态/次暂态无功响应优势明显,定转子过载能力强,同时兼具改善电网频率响应特性的作用,电网适应性更强,因此建议优先使用分布式调相机。
无功补偿装置协调控制策略如表1所示。正常情况下,风电场220 kV 并网点为考核点,优先级最高,AVC系统根据调度下发的并网点电压曲线及实际电压,分析计算给出对应的控制策略,具体如下。
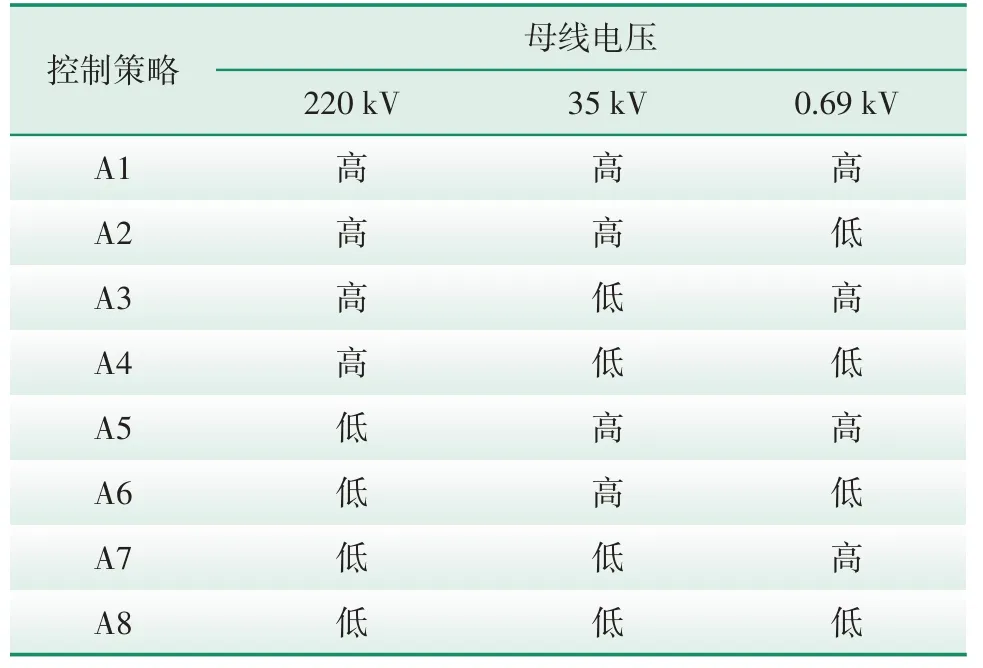
表1 协调控制策略Tab.1 Coordination control strategy
步骤1:若220 kV/35 kV、35 kV/0.69 kV 电压不协调,即本级电压高(低)而上级电压低(高),则优先调整主变压器分接头,如A2—A7。其中A3—A6调整升压变压器分接头,A2—A3、A6—A7调整箱式变压器分接头。
步骤2:35 kV无功电源根据AVC下发的无功指令,按照优先级顺序(调相机>SVG>电容器)以及式(3)的约束条件调整无功输出,使并网点电压在运行范围内。其中分布式调相机第一轮最大无功出力为40%额定值,第二轮为额定值;SVG第一轮最大无功出力为80%额定值,第二轮为额定值。分布式调相机第一轮无功出力限值低于SVG,留有足够的无功储备,从而在暂态过程中具备较好的动态性能。当分布式调相机和SVG 的无功出力之和超过电容器单组额定容量的80%时,则投入或退出1 组电容器。此外,为实现电容器投切与动态无功补偿装置出力的配合,避免电容器投退带来较大的系统电压波动,在SVG和分布式调相机无功电压控制环节中叠加无功功率闭环控制,即在接收到电容器投切指令后,以Qtx+QSVG-0.8Qx为调节目标,实现无功快速平衡。
步骤3:持续监测机端电压,若机端电压越限,则进行电压闭环控制,从而保证机端电压在正常范围内。若机组自身无功用尽仍无法将机端电压调整到正常范围,则请求35 kV 侧无功资源在不影响并网点电压的前提下协助调整。
式中:Qtx为分布式调相机的无功出力;QSVG为SVG的无功出力;Qc为电容器的无功;Qmax、Qmin为无功最大、最小出力限值。
3 仿真分析
在ADPSS平台建立含双馈机组、SVG和分布式调相机的大型风电场区域电网全电磁模型,如图5所示,其中线路、变电压、火电机组、负荷等采用由机电模型转换而来的电磁模型,风电场的双馈机组和SVG采用数字封装模型,分布式调相机则依据实测参数建立对应的电磁模型。
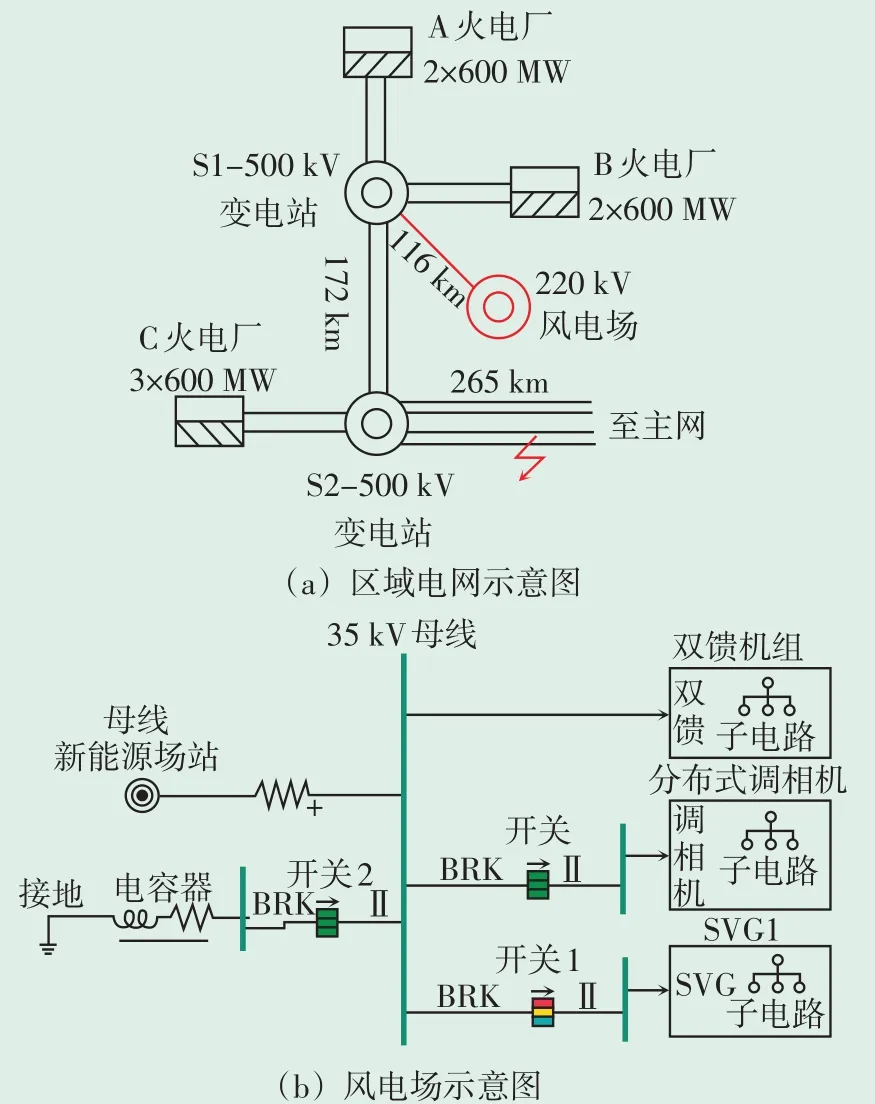
图5 含风电场的区域电网示意图Fig.5 Schematic diagram of regional power grid including wind farms
对风电机组的无功电压控制策略进行优化,优化前后仿真结果对比见图6。机组稳态运行时机端电压为0.926(p.u.),收到AVC 吸收无功功率指令,机端电压下降,当机端电压低于门槛值0.92(p.u.)时,机组不再响应AVC 的无功指令,将机端电压控制在0.92(p.u.),从而保障了机组电压稳定性。
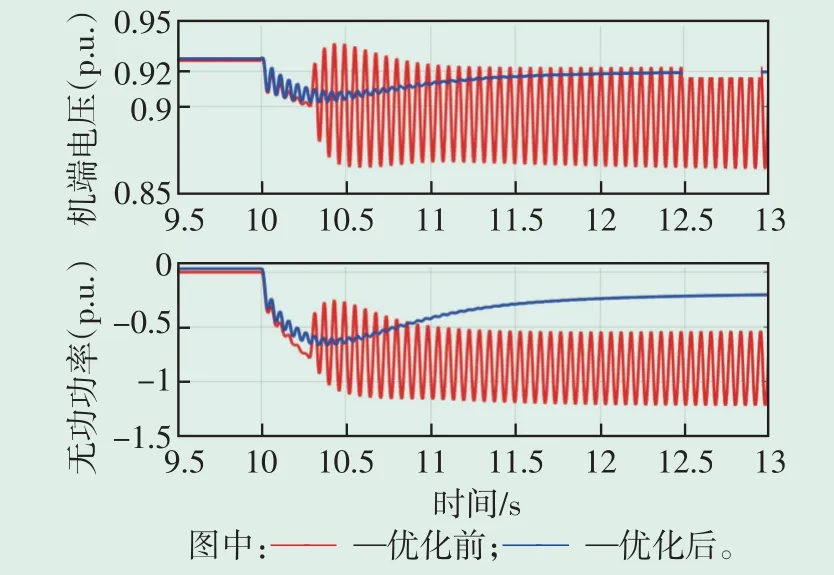
图6 机组无功电压控制策略优化前后比较Fig.6 Comparison of unit reactive voltage control strategy before and after optimization
SVG和分布式调相机的无功电压控制策略优化结果对比如图7所示。当SVG和分布式调相机的无功出力之和超过单组电容器额定容量的80%时,投切1组电容器,优化前,投切电容器引起较大的机端电压突变;优化后,投切电容器引起的无功盈余快速被平衡,机端电压突变得到有效抑制。
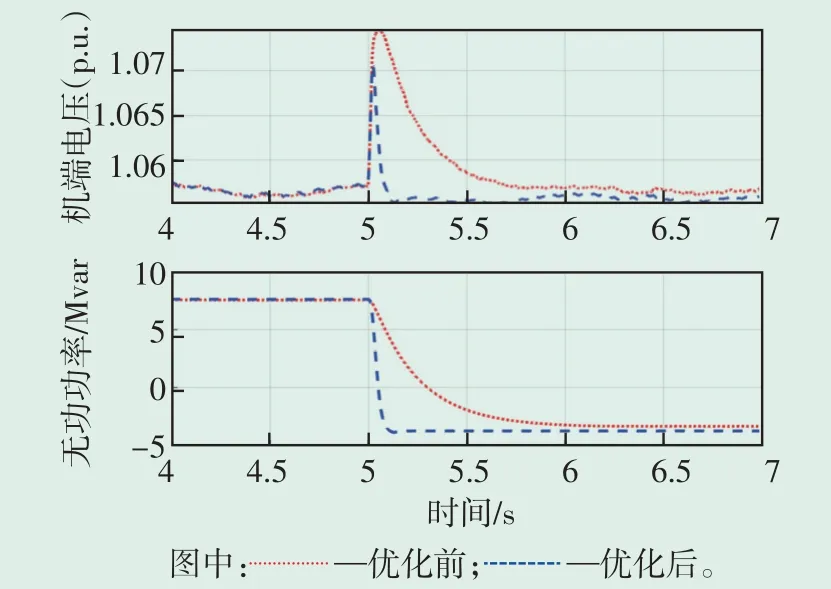
图7 SVG和分布式调相机无功电压控制策略优化前后比较Fig.7 Comparison of SVG and distributed condenser before and after optimization for reactive power and voltage control strategy
风电场采用无功协调控制策略前后结果对比如图8 所示。从图8 可以看出,电容器在故障期间无功出力降低,电压支撑效果很弱;由于SVG 容量小,故障期间电压支撑作用也不大;而分布式调相机在故障期间自发产生的无功出力很大,很好地支撑了电压恢复,同时在恢复阶段能时刻跟随机端电压的变化做出有效响应。对机端电压的“逆向”调整,有助于抑制暂态过电压,并提高电压最低点水平,验证了协调控制策略的正确性和有效性。

图8 风电场采用无功电压协调控制策略前后比较Fig.8 Comparison before and after adopting reactive power and voltage coordinated control strategy in wind farms
4 结语
本文提出了一种风电场多目标无功电压控制方法,在满足风电场并网点电压和机组机端电压要求的前提下,优化了风电机组、SVG和分布式调相机自身无功电压控制策略以及各无功补偿装置之间协调控制策略。仿真结果表明,该控制策略可有效维持机组机端电压在正常范围,提升机组稳态时电压稳定性,同时能进一步抑制暂态过电压,提高低电压水平。