基于博弈论的车联网延时攻击防护技术研究
2023-11-29于龙海于明明霍全瑞孙冬青任世轩
于龙海 于明明 霍全瑞 孙冬青 任世轩
(中汽智联技术有限公司,天津 300393)
主题词:车联网通信 延时攻击 信噪比 博弈论 防护技术
1 前言
车联网(Vehicle to everything,V2X)[1-2]能够实现人车路的有效协同,也给车辆的安全性带来了隐患。车载单元(On Board Unit,OBU)和路侧单元(Road Side Unit,RSU)在信息交互过程中容易受到信号干扰,使通信延时急剧增加,破坏信息交互连续性,进而导致人身危险及财产损失[3-4]。
文献[5]调查了针对自动驾驶汽车的各种网络攻击的可能性、严重性和可预防性,并提供了相关漏洞和防护手段。文献[6]提出了可反映道路状况的路况知识矩阵,并将该矩阵与车辆互联领域中的车辆状态进行映射,提出了车辆互联领域的安全问题与挑战。文献[7]指出了智能网联汽车领域女巫攻击的危害,车辆将多个虚假消息传输到其他节点上,通过提高恶意信息在传输窗口中的信息占比与位置随机性,模糊化攻击者的真实身份。智能网联汽车领域依旧使用密码学和公钥基础设施(Public Key Infrastructure,PKI)来保障安全性。文献[8]提出了大规模车联网条件下的密码方案,以此加强认证,将公钥密码学引入假名生成,以非对称密码学方式获取车辆真实身份。因车联网终端通信多为无线方式,无线物理层的安全研究将极大提高车联网的鲁棒性。文献[9]、文献[10]的防护方案向通信信号中加入噪声,使得带有人为噪声的信号在空间中传播,以此提高信号传输的安全性。文献[11]研究了大规模网络场景下通信节点相互影响模型和单一节点传输模型。文献[12]研究了无线信号传输过程中的通信延时攻击,通过干扰合法传输增加延时,并基于随机几何方法建立了干扰模型。文献[13]提出了无线通信场景下基于检测被攻击频率的无线信道的防御方法。文献[14]提出了一种缓和无线通信干扰的模型,通过提高信号发射功率提升了合法传输信号的信噪比,进而防御信号干扰。
现有安全研究多集中于车辆匿名化与隐私保护、车联网PKI体系设计与建设、机器学习在车联网入侵节点检测中的应用,但对于物理层信道的攻击研究较少。本文在前期研究工作的基础上,提出一种基于博弈论的V2X延时攻击防护方法,通过调节车联网节点传输策略保证通信质量,抵御攻击者对信道的干扰,针对LTEV2X PC5无线通信过程中的信道干扰进行防御,缩短通信延时,保证V2X应用场景的安全性、通信可靠性。
2 延时攻击防护方案
攻击者通过向V2X 信道发射噪声,降低合法车联网节点的信噪比,进而增加车联网节点传输延时。根据香农定理,无线通信场景下,信号的传输功率越大,信息传递的速率也越大:
式中,C为无线信号传输速率;B为无线信道带宽;S为信息的传输功率;N为应用环境中噪声功率。
本文研究的攻击场景中,攻击节点进行反应式干扰攻击,即攻击节点持续检测无线信道中的能量强度,所检测的信道中能量高于一定阈值即视为存在车联网节点通信,当检测到信号传输发生时,攻击节点向信道广播噪声。车联网具有极强的动态拓扑特性,因此攻击节点可能会跟随传输信号源,也可能在固定位置对周围环境进行干扰攻击。反应式干扰攻击仅在判断出信道上存在通信时发射干扰信号,因此降低了攻击的能量消耗,以此延长攻击节点生命周期,提高破坏能力。攻击流程如图1所示。

图1 恶意节点攻击流程
目前,国内车联网通信主要借助OBU 与RSU 开展。某一时刻,选取一台合法车辆作为研究对象,车辆与RSU的通信场景如图2所示。其中,Ps为OBU的信号传输功率,Pj为攻击节点噪声发射功率,hs为OBU 到RSU的信道增益,hl为OBU到攻击节点间的信道增益,hj为攻击节点到RSU 间的信道增益。OBU 与RSU 通过PC5接口进行车联网通信,此时RSU可能与多台车辆进行通信。环境中存在某一攻击节点,对合法车辆进行反应式干扰攻击,以达到干扰PC5 信道通信、延长车联网业务通信延时的目的。攻击节点持续检测PC5 信道上的信号功率,当检测结果大于设定阈值时,判断PC5 信道上存在合法OBU与RSU通信。

图2 攻击场景
车联网具有高度动态的拓扑特性,攻击节点会因与合法车辆的距离变化,导致检测失误。故本文借助概率来描述应用场景下的通信问题。假设合法OBU与RSU发生通信的概率为PT,攻击节点检测到应用场景下PC5信道内合法通信的概率为PD,设攻击节点错误检测合法通信的概率为PF,则有:
式中,g为应用场景下环境噪声功率;X为应用场景下OBU的信噪比;E为攻击节点判断PC5信道中存在合法通信的能量功率阈值;t为攻击节点持续检测信道的检测时间;fs为攻击节点的采样频率;G(t)为二维高斯分布函数,用于建立攻击节点检测概率。
攻击场景下,合法OBU传输的信噪比X为:
OBU 传输信息的速率与信号发射功率间的关系为[15-16]:
式中,Pmax为天线的最大传输功率;Y为应用场景中其他OBU与RSU通信对所研究的OBU产生的噪声的多径效应及莱斯衰落后在环境中产生的信噪比[12];k为环境中噪声信号的数量,除OBU 自身与其他车联网单元的通信信号外,其他信号均视为对本OBU通信的噪声信号;si为环境中第i个噪声信号;E()为噪声信号si的计算功率平均值;σ2为静态高斯分布方差;ri为第i个信号的衰落因子;E(ri)为所有信号的衰落因子的平均值。
OBU传输目标函数中包含了攻击节点的噪声功率、环境中多节点传输多径效应及莱斯衰落影响等因素的关系。目标函数通过提高信号传输过程中的信噪比来提高信息传输速率,进而缩短通信传输延时。应用环境中,同一个RSU某一时刻可能与多个OBU进行通信。这样,当研究某辆车时,其他OBU将会对研究目标的通信造成信号干扰,该干扰量即为Y。合法传输信噪比是正向激励,信号在传输过程中的能量损耗及环境噪声为负向激励。在Y模型建立过程中,由于通信场景中其他单元的通信对于所研究的OBU 通信而言均为外界干扰,其他通信OBU的信号直流分量对研究对象存在严重干扰,因此选用噪声莱斯衰落后的信噪比作为负向激励。
分析攻击节点在所设计的应用场景下的信号传输。和构建车辆数据传输能力与传输功率关系的过程类似,攻击节点的目标函数为:
在工作过程中,环境中OBU与RSU通信产生的Y对于攻击节点加强了攻击效果,为正向增益。式(6)中并未加入因攻击节点检测误报、漏报以及OBU通信概率的修正。当OBU正常通信,但攻击节点错误检测时,攻击节点并未发动攻击,OBU与攻击节点的目标函数为:
当OBU未通信,攻击节点错误检测时,OBU与攻击节点的目标函数为:
当应用环境中不存在PC5 通信,攻击节点未攻击时,OBU与攻击节点的目标函数为:
此时,Y不会对OBU及攻击节点的目标函数产生影响。
式(7)~式(9)分别建立了OBU 与攻击节点在OBU正常通信且攻击节点错误检测时的目标函数、OBU 未通信且攻击节点错误检测时的目标函数,以及OBU 未通信且攻击节点正常检测时的目标函数。为了使目标函数包含所有情况,将式(2)传输检测概率、式(3)检测误报概率与车辆的信号传输概率PT代入研究对象OBU目标函数式(5)、攻击节点目标函数式(6)中,分别得到正常通信车联网节点综合目标函数和攻击节点综合目标函数:
式(10)、式(11)表达了OBU传输效果、攻击节点攻击效果与OBU 传输功率Ps、攻击节点传输功率Pj之间的关系。对于噪声Y的处理,采用三阶拟合系数,得到Y的近似解,并归一化计算偏差。莱斯衰落因子为:
式中,xi、yi为不同信道内的2束静态高斯分布信号;β为该信道噪声的直视分量。
当取ri=10 dB 时,Y的近似值为10 dB。根据文献[15]的研究结论,ri<25 dB时,Y均近似与ri相同。即在该攻击场景下,虽然莱斯因子和车辆传输功率与环境噪声功率相关,但环境中的莱斯衰减系数在某一范围内波动,后续仿真中,可利用该结论简化仿真公式。
为了抵抗攻击,车联网节点通信时,应该考虑到攻击节点可能的攻击情况,进而调整传输策略。针对传输目标,通信的车辆信噪比取有限范围内的最大值:
式中,XOBU为攻击场景下OBU 的信噪比最大值;Xattack为攻击场景下攻击节点的信噪比最大值。
OBU 与攻击节点两者的信噪比在应用场景中是相互影响的。在攻击模型中,OBU 与攻击节点在时间维度上存在联系。OBU 与RSU 开始通信,随后攻击节点检测PC5 信道上的能量,检测到V2X 通信后发动攻击。OBU 根据传输信噪比调整传输策略。本文基于博弈论方法分析目标函数,首先分析攻击节点,在攻击节点传输策略固定的条件下分析OBU 的通信情况,通过一次博弈,得到OBU 的传输策略。计算攻击节点目标函数f(Pj)取得极大值时的攻击功率Pj及f(Pj)关于Pj一阶导数为0 的点,将该点带入攻击节点综合目标函数式(11)中,得到Ps与Pj的关系:
从攻击节点分析传输策略,在车辆传输策略固定,即Ps固定的条件下计算Pj,然后导出Pj关于Ps的函数关系,得出此时能够检测到的Ps的值与检测率PD(Ps)间的关系。攻击节点可检测功率fT(Ps)与Ps的函数为:
分析fT(Ps)的变化规律,先计算fT(Ps)关于Ps的一阶偏导数:
其中,PD(Ps)的导数(Ps)可由式(2)计算,结果为:
(Ps)为单调递增函数,式(16)也为单调递增函数,表明攻击节点在OBU 传输功率Ps足够大的前提下能够检测合法的PC5通信。
检测到PC5通信后,攻击节点开始向PC5信道发起干扰攻击。从检测率PD(Ps)的微分方程中计算出检测阈值Eps:
至此,得到了在OBU 发射功率为Ps的情况下攻击节点的攻击策略及攻击节点能够检测到环境中PC5 通信的阈值。利用博弈论的观点研究车辆的传输策略,在固定攻击节点传输策略Pj的条件下,OBU的综合目标函数f(Ps)的计算结果为:
一次博弈过程如图3 所示。首先固定车辆发射功率,研究攻击节点,即设Ps一定,计算Pj与Ps的关系。通过f(Pj)取得最大值,得到攻击节点的最优攻击策略Pj。而后将攻击节点的最优传输策略Pj带入f(Ps),得到仅关于Ps的目标函数。
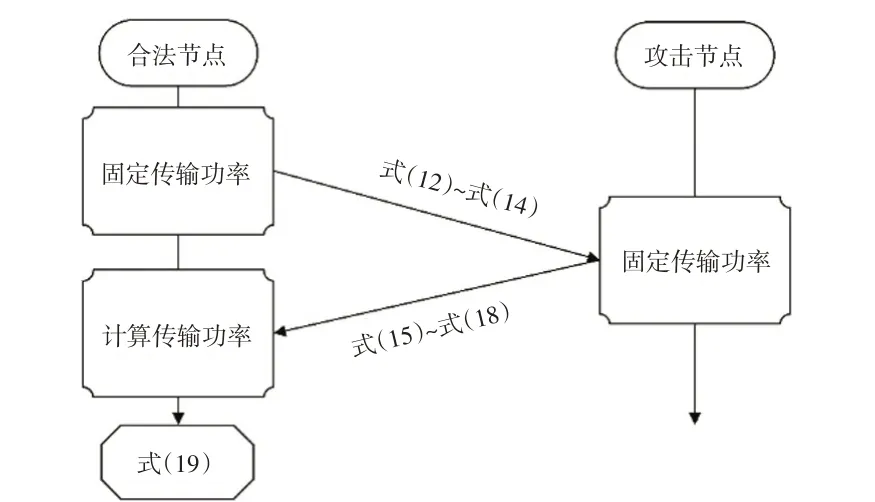
图3 一次博弈过程
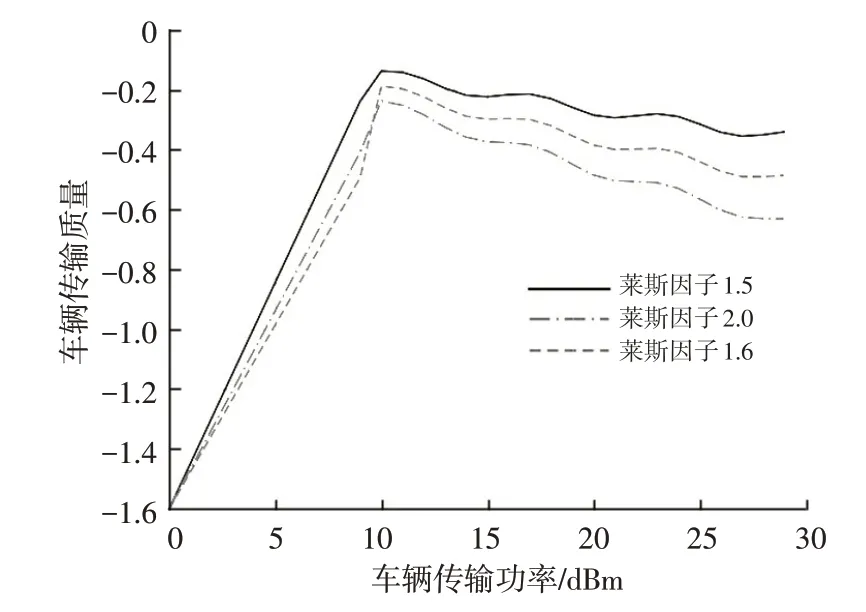
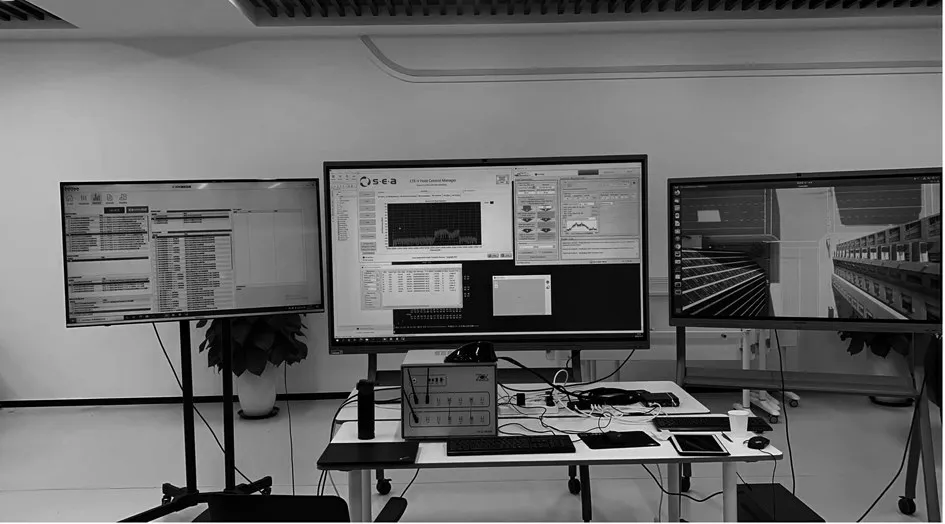
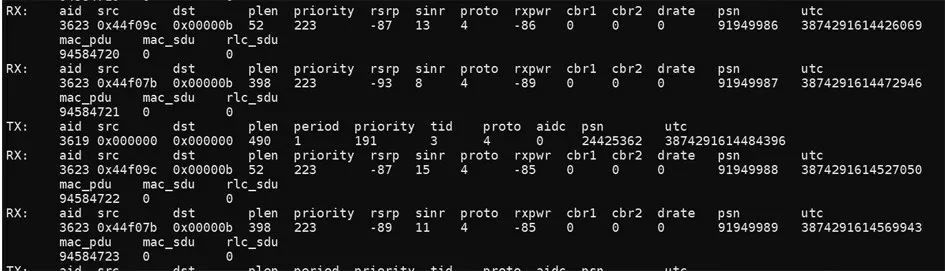
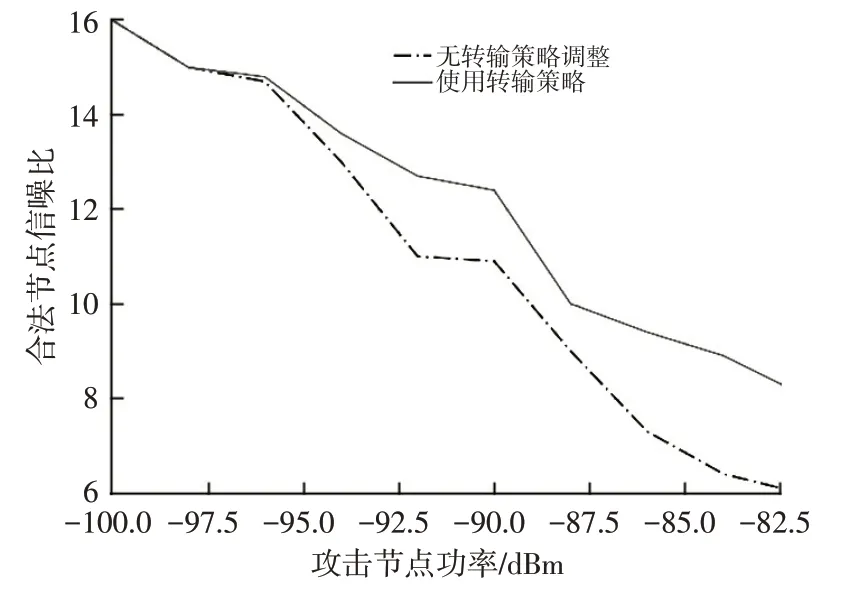
根据实际g与Pmax的关系,当0 同样,通过研究f(Ps)的微分,分析得到攻击场景下合法车联网节点的传输策略。首先根据f(Ps)得到f(Eps),以该点作为车联网节点传输功率的函数分界点,然后计算f(0)、f′(0)、f′(Eps)、f(∞)、f′(∞),并通过多点微分得到函数的单调性关系: 在0 通过带入环境参数分析f(Ps)的函数特征,即分析延时攻击场景下车辆的传输策略。设环境中固有噪声功率为30 dBm,天线的最大传输功率Pmax=30 dBm,车辆发射信号通信的概率PT=0.8,攻击阶段漏检概率PF=0.1,时间与采样频率的乘积tfs=2,天线(信道)增益hs、hl、hj均为6 dBi,并假设函数f(Eps)分段点,取Eps=10 dBm。仿真结果如图4所示。 图4 不同莱斯因子下车辆的传输策略 随着环境中莱斯因子的变化,f(Ps)在微分中的表现略微差异。环境中莱斯因子越大,目标函数f(Ps)越小,但f(Ps)的微分趋势相同。莱斯因子影响了应用环境中车联网RSU 与其他OBU 的通信,即影响了噪声莱斯衰落后的信噪比。 对比应用环境中使用f(Ps)传输策略和以恒定功率通信的信噪比。环境中莱斯因子始终取2。构建应用环境中的模型: 式中,XPj为在攻击节点的攻击功率为Pj条件下合法车联网节点的信噪比;补偿系数∂=0.9 用于补偿由攻击节点到合法车联网节点之间距离带来的噪声损失。 此时的检测阈值Eps约为0.4。设定车联网节点V2X传输通信的功率为15 dBm,结果如图5所示。 图5 信噪比随攻击节点功率的变化趋势 仿真结果表明,本文设计的基于信噪比的延时攻击防御方案通过动态调整发射功率,使得合法节点在攻击节点的传输功率线性增大时保持了较高的水平,在一定程度上缓解了延时攻击。 借助V2X 实体设备开展试验,设备布置如图6 所示。 图6 试验设备布置 所使用的V2X 设备OBU、RSU 如图7、图8 所示,天线增益为6~8 dB,驻波比不超过2。 图8 RSU设备 借助场景仿真软件,构建可视化仿真环境如图9所示,试验中可量化参数如表1所示。 表1 试验参数 图9 可视化仿真环境 首先在未开启攻击时查看OBU传输信号与干扰加噪声比(Signal to Interference plus Noise Ratio,SINR),结果如图10所示。 图10 OBU通信电气信息 待信噪比平稳后,其数值约为16。通过逐渐增大攻击节点功率分析信噪比变化,结果如图11所示。 图11 信噪比随攻击节点功率变化趋势 由以上试验结果可知,在攻击节点功率一定的情况下,OBU按照f(Ps)动态调整信号发射功率较未使用动态策略的OBU具有更大的信噪比。调整策略基于车联网车辆与车辆(Vehicle to Vehicle,V2V)通信场景下的发射功率要求,并非简单提升发射功率,保证了使用此防护方案的OBU或RSU对其他车联网单元的额外干扰保持在较低水平。 本文研究了车联网场景下PC5 信道的延时攻击防护技术,使用信噪比为指标,利用博弈论分析了V2X车联网节点传输功率与攻击者干扰攻击功率之间的关系。考虑攻击节点干扰模型,通过一次博弈,根据干扰攻击的变化改变OBU及RSU的传输功率。最后通过仿真与V2X 设备试验证明了为抵御干扰攻击,综合考虑发射功率、信噪比、检测概率并得到合法节点的传输策略能够保障V2X通信的安全性。该防护方案可以缓解因环境中噪声干扰增多而导致通信信噪比快速下降的问题,进而保证了业务通信的延时要求。3 试验验证




4 结束语
