铰链力矩风洞试验动态载荷监视预警系统研制
2023-11-28熊文韬刘忠华练真增
熊文韬,刘忠华,赵 昱,练真增
(中国空气动力研究与发展中心低速空气动力研究所,四川 绵阳 621000)
0 引言
监视预警系统指对可能发生的未知风险,建立不间断的监控体系,并在异常情况下紧急报警的系统。该系统能有效降低所应用领域的人员、设备等安全风险,减少灾害危险发生,广泛应用于军民用领域[1-4]。
操纵面是飞行器实现姿态控制的关键部件,操纵面偏转通过作动机构进行推动,而操纵面的铰链力矩特性是作动机构设计的重要依据。如果作动器的铰链力矩设计功率不足,可能导致舵面大角度偏转的需求无法满足,且舵面偏转的角速度会减小,操纵面的响应时间会增长,飞行器的跟随性就变差。因此在飞行器设计阶段,准确获得各操纵面的铰链力矩特性具有重要意义[5]。由于操纵面通常位于安定面后缘,受飞行器其他部件干扰,尤其在偏转后流动状态更加复杂,存在流动分离等问题,理论和数值方法难以准确估算铰链力矩特性,而风洞试验是飞行器设计阶段获得操纵面铰链力矩特性最可靠的手段[6]。
在铰链力矩风洞试验中,当操纵面偏度较大时,操纵面处可能会形成稳定的流动分离,当流动分离产生的涡脱落气动激励频率fex与操纵面/天平系统的固有频率fin接近时,会发生结构共振,导致操纵面/天平系统产生大幅值的动态载荷,如图1所示。
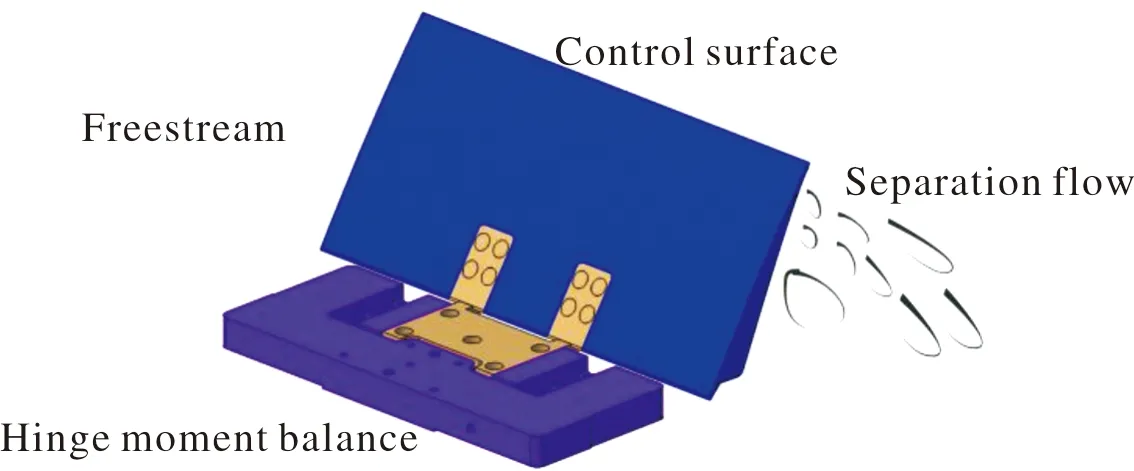
图1 操纵面/天平系统动态载荷示意图Fig.1 Diagram of dynamic load of control surface/ balance system
在开展飞行器操纵面铰链力矩风洞试验时发现,当操纵面偏度较大时,天平信号中存在单一频率的动态载荷,该动态载荷频率与操纵面/天平系统固有频率fin较为接近,幅值超过了天平设计载荷。在该动态载荷下试验,会导致天平结构疲劳破坏,严重影响天平安全。此外,动态载荷作用在天平各通道上产生的大幅振荡信号,数据采集系统无法通过调理、滤波等手段完全过滤,从而会对试验数据精准度产生影响。
目前人们在铰链力矩试验技术和铰链力矩天平设计技术研究已经较多,但尚未针对铰链力矩试验中的动态载荷问题开展过相关研究。
在铰链力矩试验技术研究方面,张晖等[7]为解决小尺度铰链力矩风洞试验中存在中小尺度的试验雷诺数相比飞行雷诺数偏低、缝隙模拟困难以及天平安装困难问题,发展完善了一套大尺度模型低速风洞铰链力矩试验技术,并用于大尺度乃至全尺寸模型铰链力矩特性研究;黄宗波等[8]采用试验与计算相结合的方法,对操纵面与安定面之间缝隙对操纵面铰链力矩风洞试验结果影响进行了研究,结果表明缝隙宽度对操纵面铰链力矩影响规律与操纵面迎角和偏度相关,但缝隙不同对铰链力矩的影响量较小;何发东[9]通过在操纵面作动机构的传力关键件上安装应变计,发展了操纵面铰链力矩飞行试验实测技术,提高了飞行试验操纵面铰链力矩测量精准度,缩短了飞行试验周期;唐宁等[10]基于有限元方法设计了测量应变电桥,通过校准试验建立了作动器所受拉压载荷及应变响应关系的载荷方程,在飞行试验中获得到了升降舵铰链力矩;陈丽等[11]从铰链力矩试验技术、高精度铰链力矩天平研制两方面,发展了提高测量最大铰链力矩试验数据精准度的有效模拟技术。
在铰链力矩天平技术研究方面,潘华烨等[12]从杆式铰链力矩天平、片式铰链力矩天平和天平静态校准三个方面,对中国空气动力研究与发展中心高速空气动力研究所的铰链力矩天平技术进行了综述;潘华烨等[13]针对传统的高速风洞片式铰链力矩天平所采用无轴向力测量结构对法向力以及铰链力矩的测量不准确问题,研制出一种新型结构带轴向力测量的四分量片式铰链力矩天平,提高了试验数据的精准度;张逊等[14]为了解决铰链力矩天平在模型上的空间受限、天平尺寸小等问题,发展了模型天平一体化设计,成功研制出一体化铰链力矩天平;史玉杰等[15]针对传统片式天平元件存在不同受载条件下变形不一致,装配预紧力影响大的问题,发展了一种基于柱梁的片式铰链力矩天平技术,提高了测量的精准度;张丹等[16]通过静态加载和有限元分析的方法,分析了螺钉预紧力对铰链力矩天平影响,并给出了改善预紧力影响的措施;李勇等[17]通过有限元计算和正交试验设计,研究了铰链力矩天平固定端结构参数变化对天平输出量的影响规律,结果表明铰链力矩天平与固定端的接触面积、螺钉连接位置以及天平固定端厚度对天平输出量均存在显著影响。
由于操纵面流动分离与安定面流动、舵面偏度密切相关,难以通过理论分析和数值仿真准确获得分离流产生的气动激励频率,从而无法在天平设计时使得操纵面/天平系统的固有频率远离气流分离频率,只能通过在试验过程中对天平载荷进行分析,实时获得天平动态载荷信息,对危险试验工况监视预警,从而确保天平不出现动态载荷超载问题。
文中给出了铰链力矩风洞试验动态载荷监视预警系统的软硬件组成和设计方案,动态载荷数据处理方法,以及系统预警的临界限值设定方法。通过铰链力矩风洞试验应用,验证了动态载荷监视预警系统预警试验中动态载荷的有效性。针对系统预警存在大幅值动态载荷的试验工况,通过调整操纵面/天平系统的固有频率,避开试验中的分离流气动激励频率,避免了相同试验工况下动态载荷的产生,确保了试验安全和试验数据可靠。
1 动态载荷监视预警系统设计
铰链力矩试验动态载荷监视系统,由铰链力矩天平、数据采集系统、监视预警软件、测控网等组成,如图2所示。
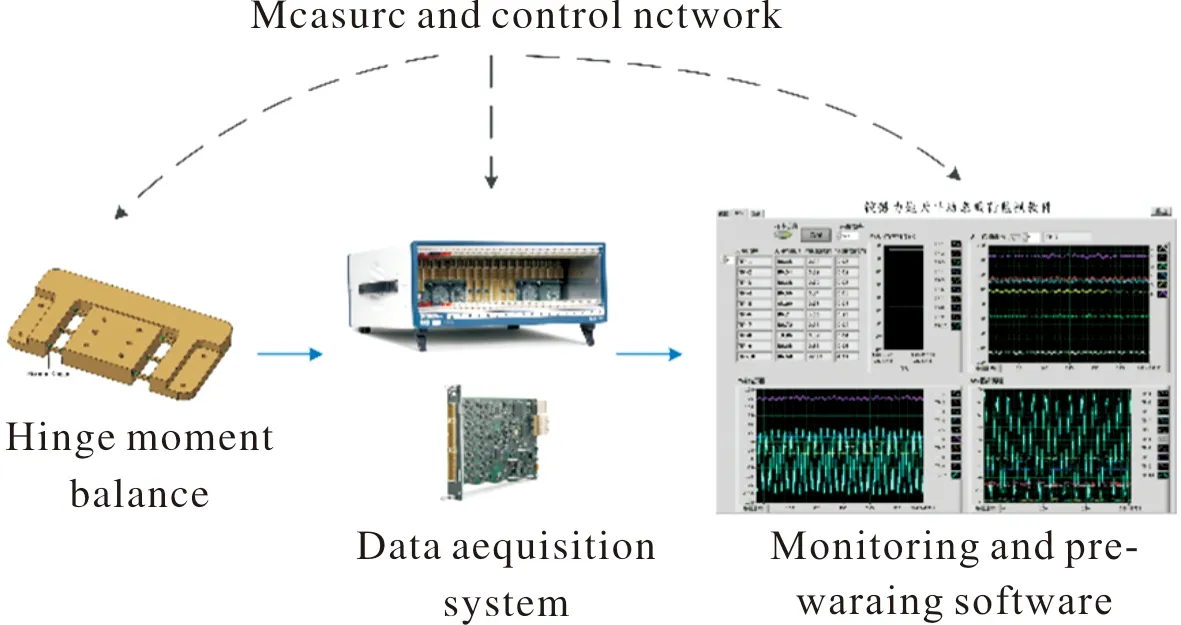
图2 铰链力矩风洞试验动态载荷监视预警系统Fig.2 Monitoring and prewarning system of the dynamic load in hinge moment wind tunnel test
铰链力矩天平为载荷感受单元,将气动载荷转变为天平通道电压信号;数据采集系统对天平通道电压信号进行采集测量,并将模拟信号转换为数字信号;监视预警软件接收通过网络传输的天平通道电压信号,计算获得铰链力矩天平的时域载荷,通过傅里叶分析获得天平动态载荷特征;分析动态载荷的频率、幅值与锤击法获得的系统固有频率、天平设计量程的关系,进行超限预警。监视预警系统原理图如图3所示。
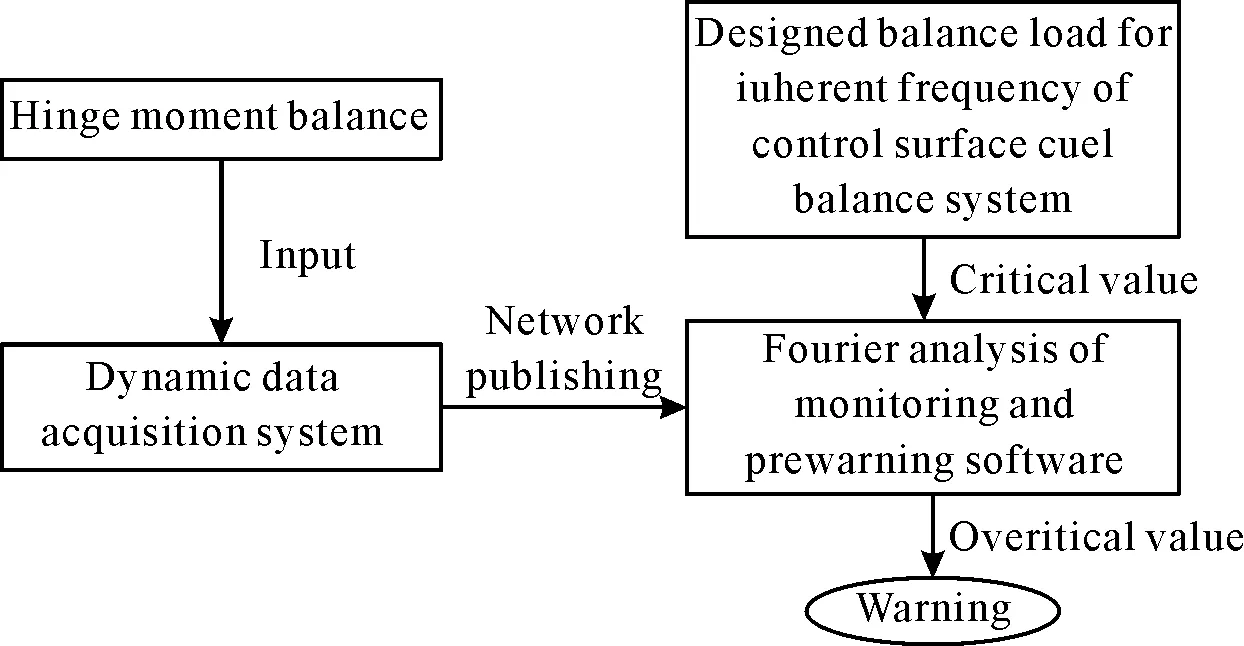
图3 动态载荷监视预警系统原理图Fig.3 Schematic diagram of the monitoring and prewarning system for dynamic load
1.1 铰链力矩天平
铰链力矩天平为应变天平,如图4所示,能将操纵面承受载荷转变为电信号,可高保真的获取天平载荷的时域特征,因此,文中的动态载荷监视预计系统将其作为测量单元,用于测量操纵面/天平系统的动态载荷。
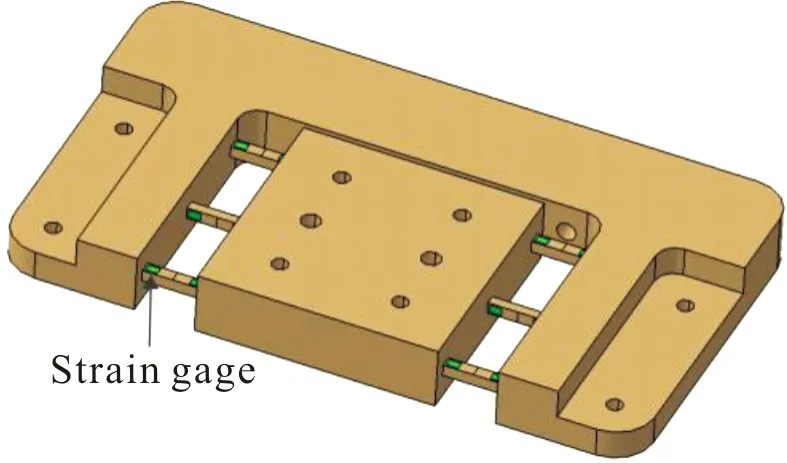
图4 铰链力矩天平示意图Fig.4 Diagram of hinge moment balance
1.2 数据采集系统
数据采集系统由控制器、采集卡和采集机箱等组成,可将获得的电压信号转换为数字信号,用于采集铰链力矩天平的通道电压。数据采集系统接入风洞试验管理调度网,实时采集所有天平通道电压数据,并通过用户数据报协议(user datagram protocol,UDP)实时将天平电压信号发送到网络,监视预警软件在指定端口接收天平电压信号并实时处理分析。
按照采样定理[18],以采样频率fs,对连续信号xa进行采样,得到采样序列xs,若连续信号xa为带限实信号,其频谱最高频率为fc,当采样频率fs≥2fc时,则采样信号xs,包含了连续信号xa的全部信息。通常天平操纵面系统的固有频率不超过200 Hz,不考虑2阶气动激励频率与天平固有频率重合情况时,将天平载荷的信号分析的截止频率取为200 Hz。按照采样定理,数据采集系统最低采集频率应大于400 Hz,且采集卡不能进行低通硬件滤波,信号调理系统也不能过滤高频信号,数据采集系统获得的采样数据应尽可能包含连续信号的全部信息,以用于天平动态载荷分析。
文中选择NI公司的PXIe-1095机箱、PXIe-8880控制器和PXIe-4309动态采集卡组成的数据采集系统,用于天平动态载荷采集分析。通过动态采集卡的6个输入通道采集铰链力矩天平的6个通道电压信号,每个输入通道的采集频率设置为500 Hz。
1.3 监视预警软件设计原理
监视预警软件的作用是分析处理铰链力矩天平动态载荷信号并进行超限预警。数据处理主要包括参数配置、数据接收与处理、结果显示与预警3个部分,基于LabVIEW开发,运行流程如图5所示。
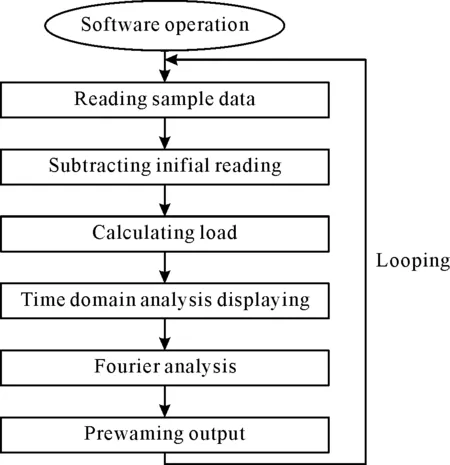
图5 监视预警软件运行流程图Fig.5 Flow chart for monitoring and prewarning software
监视预警软件从网络接收天平电压数据后,通过天平公式计算得到天平时域载荷;对天平时域载荷进行傅里叶分析,获得天平载荷在频域内的幅值和频率;分析天平频域载荷的幅值和频率与操纵面/天平系统固有频率、载荷临界阈值的关系,判断动态载荷是否超限报警。
参数配置部分主要包括天平通道配置、天平计算公式配置以及临界阈值配置,设计原理如图6所示。铰链力矩试验天平数量具有不确定性,且需要多天平同步监视预警,因此将天平通道、天平计算、天平索引设计为动态载入模式,根据试验需求在软件中进行配置。不同天平的设计载荷和操纵面/天平系统的固有频率不同,因此监视预警软件具有天平的临界阀值配置功能。

图6 参数配置功能设计原理图Fig.6 Functional design schematic diagram for parameter configuration
数据接收与处理部分主要包括数据接收和数据处理,通过多线程并行处理技术,实现数据读取和数据处理高效运行,设计原理如图7所示。数据接收线程,能够实时接收来自测控网UDP的天平通道电压数据,并对样本数据进行预处理,当数据量满足预设采样时间则触发载荷计算模块工作。数据处理线程,主要实现对多天平通道信号进行通道索引、匹配、通道公式转换、天平时域载荷计算、天平载荷频谱分析、预警阀值判别和预警提示等功能。
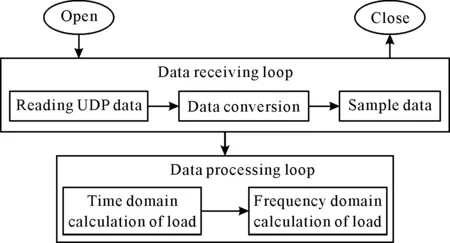
图7 数据接收与数据处理功能设计原理图Fig.7 Design diagram for data receiving and processing functions
结果显示与预警部分主要包括时域曲线显示、频域分析结果显示和超临界预警。天平时域载荷以波形图方式实时显示,天平载荷在频域内的幅值和频率以数组形式显示。天平各分量的动态载荷幅值超过临界阀值时,软件将会触发报警,报警信号以软件前面板颜色高亮闪烁进行提示,天平载荷值降到安全阀值内,报警信号自动解除。监视预警软件显示和预警界面如图8所示。
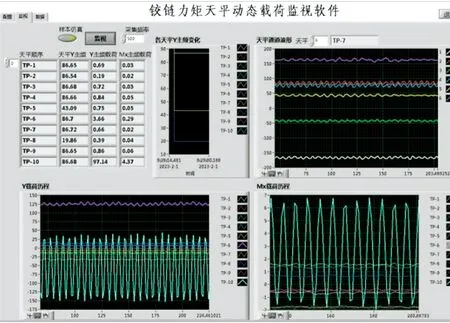
图8 监视预警软件界面图Fig.8 Interface for the monitoring and prewarning system
2 动态载荷监视预警系统数据处理
2.1 动态载荷数据处理
数据采集系统获得的天平电压是离散的时域信号,要获得频域信号,必须进行信号处理。离散傅里叶变换(DFT)是数字信号处理中应用最广泛的变换方式,能够实现卷积、滤波、相关等算法,获得信号的频域特征。
对于有限长序列x(n)的N点的离散傅里叶变换公式为:
式中FD为离散傅里叶变换。
离散傅里叶变换计算量大,应用成本高,因此通常采用快速傅里叶变换(FFT)来实现离散信号的傅里叶变换。FFT的基本思想是将大点数的DFT分解为若干小点数的DFT,从而减小DFT计算中乘法的运算次数,从而显著降低计算量。FFT常用的算法包括时域抽取发(DIT)、频域抽取法(DIF)等。
采样频率为fs,采样点数为N,频率分辨率Δf为采样频率与采样点数的比值,即Δf=fs/N。如果信号频率是频率分辨率的整数倍,则为同步采样;若为非整数倍,则为非同步采样。在同步采样的情况下,FFT可以准确分析出信号的频率特性,而在非同步采样的情况下,会发生频谱泄露和栅栏效应,从而导致信号的频率特性存在一定误差。在实际的信号分析中,同步采样很难实现,通常均为非同步采样,FFT得到的谐波信号的频率、幅值和相位会存在一定误差,可通过加窗函数减小其影响[19]。由于铰链力矩试验中天平动态载荷监视,对信号分析幅值、频率的精度要求不高,为了减小计算量,提高监视的实时性,文中采用不加窗函数的FFT对天平时域信号进行处理。
2.2 操纵面/天平系统固有频率测量
当气动激励频率fex与操纵面/天平系统固有频率fin接近时,会导致天平承受大幅值动态载荷,因此必须保证试验中气动激励频率远离操纵面系统固有频率。气动激励频率可在试验过程中通过天平信号实时分析得到,而操纵面/天平系统的固有频率,则需要在试验准备阶段通过锤击法进行测量[20]。锤击法是经典的固有频率测量方法,其原理是系统受到冲击激励时,会在固有频率下产生峰值响应,通过对冲击激励的动态响应信号进行分析,则可获得系统的固有频率。文中采用铰链力矩天平作为锤击法的激励测量元件,通过动态数采系统采集天平受锤击激励时的电压信号,对获取的天平电压信号进行傅里叶变换,则可得到操纵面/天平系统固有频率。
2.3 动态载荷临界值设定
在铰链力矩风洞试验中,当动态载荷的频率处于设定频率临界限值范围内,或者动态载荷幅值超过设定幅值临界限值时,监视预警软件会触发报警并进行警示闪烁,提示试验中存在大幅值动态载荷,需要立即停止试验。
动态载荷临界限值包括气动激励频率限值和幅值限值两个部分。在应用中,通常认为激励频率在固有频率fin上下20%范围内有较大可能发生共振,因此将气动激励频率临界限值设定为0.8fin~1.2fin。动态载荷的幅值,为了确保试验安全,文中选择了较为保守的临界值,将幅值临界限值设定为铰链力矩天平各分量设计量程的0.5倍。
3 动态载荷监视预警系统验证
通过飞行器操纵面铰链力矩风洞试验,验证研制的动态载荷监视预警系统。针对系统预警存在动态载荷的工况,通过调整系统固有频率,消除动态载荷。
3.1 动态载荷监视预警系统验证
在试验准备阶段,通过锤击法获得了飞行器各操纵面/天平系统的固有频率,并将其设定为铰链力矩天平动态载荷监视软件的频率限值,将各天平的法向力和铰链力矩设计量程的0.5倍设定为动态载荷幅值限值。
以升降舵为例,锤击法得到的升降舵天平1通道电压时域图如图9所示,对时域信号进行FFT运算,得到的频域结果如图10所示,可以得到升降舵/天平系统的固有频率fin为76 Hz,将其作为临界限值设定于监视软件内。
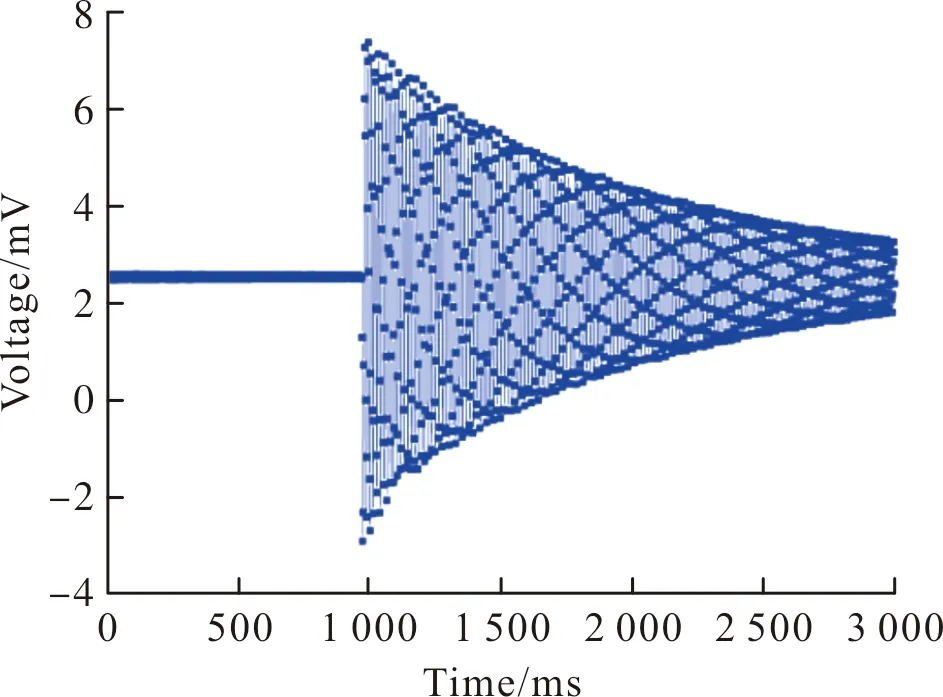
图9 升降舵天平1通道电压时域曲线Fig.9 Time domain curve for voltage of channel 1 of elevator balance
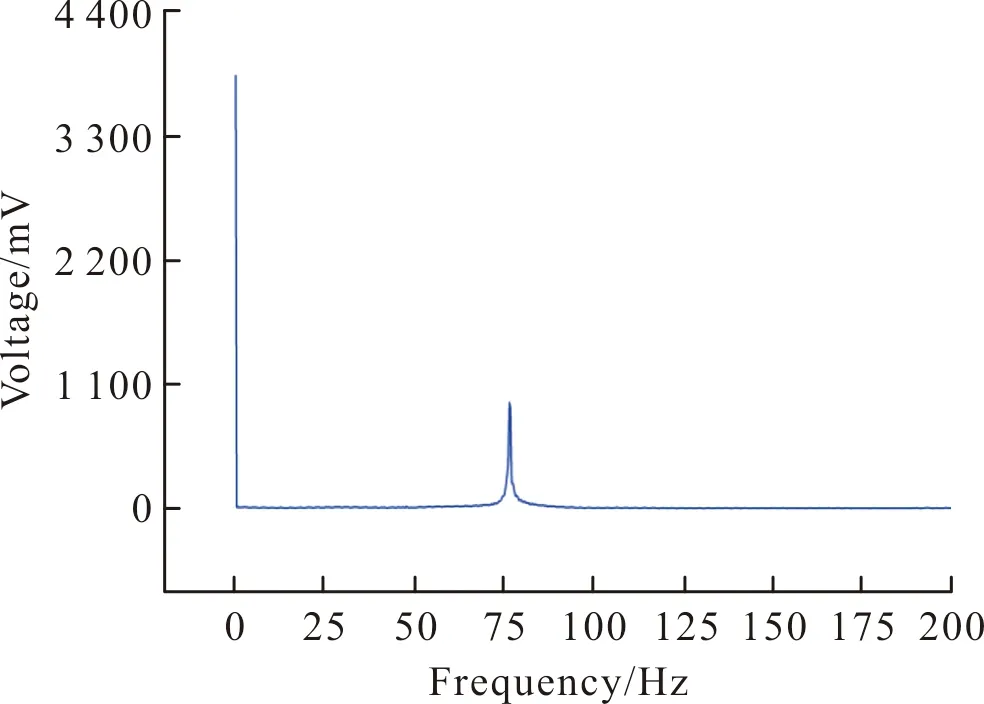
图10 升降舵天平1通道电压频响曲线Fig.10 Frequency domain curve for voltage of channel 1 of elevator balance
在风洞试验阶段,大部分操纵面均未出现动态载荷超限报警,仅升降舵在少数偏角下存在动载荷超限。当升降舵偏度为-30°时,当试验风速逐步上升至70 m/s时,动态载荷监视软件发出了预警信息,提示动态载荷超过设定限值。
对吹风过程中升降舵天平通道电压信号进行分析,天平1通道电压时域曲线如图11所示,经过FFT运算后的频响曲线如图12所示。可以看出,吹风过程中天平存在单一频率的动态载荷,其频率为87 Hz,与升降舵面/天平系统固有频率值76 Hz较为接近,导致天平响应产生较高的动态载荷,动态载荷幅值约为静态载荷幅值的2倍。
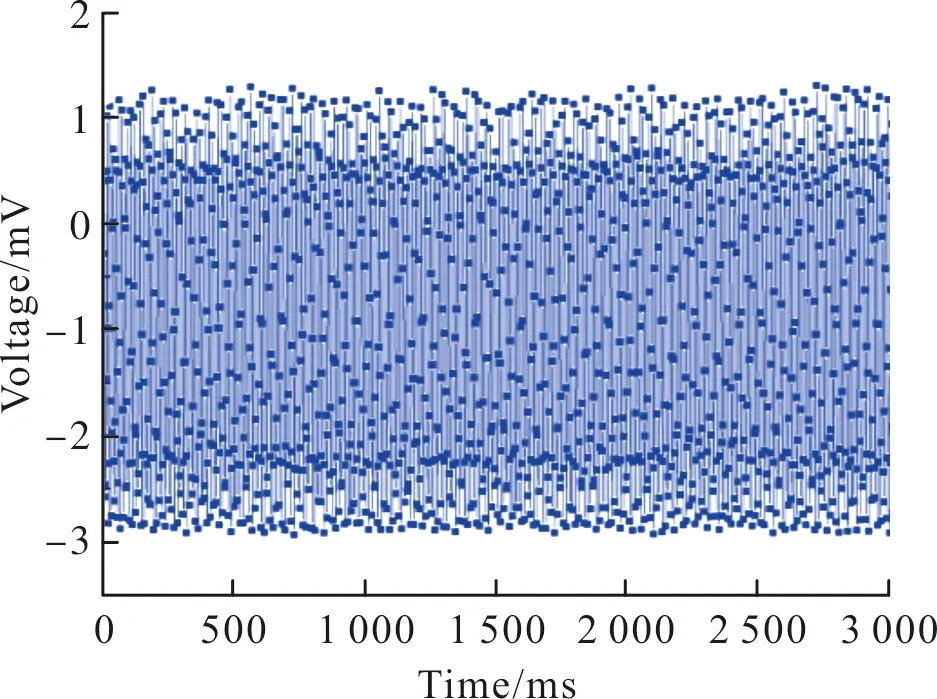
图11 升降舵-30°时天平1通道时域曲线Fig.11 Time domain curve for voltage of channel 1 of elevator balance at -30 degree
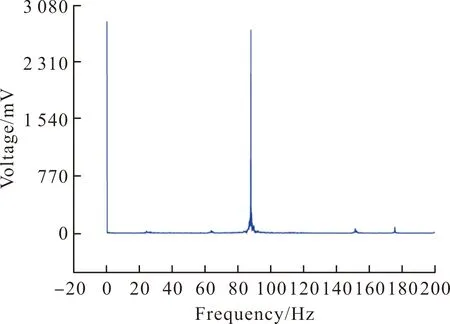
图12 升降舵-30°时天平1通道频响曲线Fig.12 Frequency domain curve for voltage of channel 1 of elevator balance at -30 degree
3.2 动态载荷消除
针对系统预警存在动态载荷的工况,操纵面偏角不变化,则绕流状态不变,流动分离产生的涡脱频率不变,即气动激励频率fex不变,要解决升降舵偏度为-30°时气动激励频率fex与系统固有频率fin接近导致的动态载荷超限问题,只能调整升降舵/天平系统固有频率fin,以避开气动激励频率范围。
对于升降舵/天平系统可近似看做悬臂梁结构,其固有频率与操纵面质量和结构刚性相关,操纵面质量越小,天平刚性越大,则系统固有频率越高。因此,采用碳纤维材料研制了轻质的升降舵模型,代替原较重的铝制升降舵模型,升降舵舵面重量由1.0 kg减小至0.6 kg;增加铰链力矩天平的应变梁尺寸,将天平安全系数由原来的4.3增加至6,提高升降舵/天平系统刚性。
通过锤击法对新研制的升降舵/天平系统固有频率进行测量,系统固有频率fin为155 Hz,远高于初始系统固有频率76 Hz,避开了87 Hz的气动激励频率。
采用新研制的升降舵/天平系统重新开展风洞试验,升降舵-30°时的铰链力矩天平1通道电压的时域曲线如图13所示,天平通道电压信号呈现在平均值附近无规律波动,表明试验中已不存在动态载荷。
4 结论
文中给出了铰链力矩试验动态载荷监视预警系统的软硬件组成和设计思路、数据处理方法和临界限值设定方法,并进行了系统的应用验证。研究结果表明:
1)铰链力矩风洞试验动态载荷监视预警系统能够预警试验中的大幅值动态载荷,从而防止动态载荷导致天平结构损坏以及数据精准度降低,有效提升了铰链力矩风洞试验的安全性,确保了试验数据的可靠性。
2)对于系统预警存在大幅值动态载荷的试验工况,通过研制轻质操纵面和高刚性天平来提高操纵面/天平系统的固有频率,将操纵面/天平系统固有频率由76 Hz提高至155 Hz,避开流动分离形成的87 Hz的气动激励频率,避免了相同操纵面偏度工况下大幅值动态载荷产生。
