基于SolidWorks和ANSYS的植保无人机喷头结构参数设计与仿真
2023-11-27高伟
高 伟
(大同市农业机械发展中心,山西 大同 037000)
农业作为第一产业,是人们生活生存的基础,保障了我国社会经济的稳步发展。我国国土面积大、地形地貌复杂,种植的农作物种类繁多导致作物病虫草害发生严重,但是受病虫草害的影响较大,这些因素影响着我国农产品的产量和质量的提升,甚至会影响我国粮食安全。传统的农药喷洒机械存在农药浪费严重、农产品农药存留超标、作业人员易中毒、作业效率低等问题,会导致土壤、空气、水源等受到污染,影响农产品的安全和人们的身体健康。与传统的喷药机械相比,植保无人机具有省水、省药、省工、省钱、安全等特点,无人植保机受地形限制较小,能够同时满足多种作物和地形的作业要求,是现代农业生产中必不可少的植保机械之一。
1981 年,美国首次采用飞机防治大面积牧草牧草病虫害,为农作物病虫害的飞防打开了出路。随后,俄罗斯、日本、德国等发达国家开始研究农用植保飞机领域。20世纪70年代开始,我国才逐渐使用航空喷洒技术防治森林病虫害,随着近15年农业机械的快速发展和国家政策的影响,我国无人植保机迅速发展,成为农作物病虫草害防治的重要工具。现阶段,我国许多高校、科研院所、相关企业等都开始了植保无人机的研究工作,为我国植保无人机的发展夯实了基础。本文以SolidWorks 和ANSYS 软件为基础,分析研究了四旋翼植保无人机的相关参数,为进一步优化研究提供理论依据。
1 植保无人机喷洒系统设计
1.1 飞行参数
飞行平台是影响植保无人机作业效果的重要因素,根据作业要求,本研究设计的分型参数如下:①飞行高度。受旋翼产生的反弹气流的影响,植保无人机作业高度太低时,无法正常飞行;如果植保无人机飞行高度较高时,药液损失严重,影响作业效果,无法保证作业质量。参考现有研究成果,本研究设计的植保无人机飞行高度为M=2~6 m。②查阅并参考多地《多旋翼植保无人机施药作业规范》,本研究设计的无人机飞行速度为v=3~5 m/s,无人机作业的最小幅宽为S=3 m。
1.2 喷头主要参数
分析市面现有的植保无人机发现,植保无人机喷头形式主要包含压力式和离心式2 种,压力式喷头相较于离心式喷头,有更强的抗漂移能力,结合安装工艺和无人植保机的组装成本等要求,本研究选择扇形压力式喷头,结构见图1。

图1 扇形压力式喷头喷嘴结构Fig.1 Fan pressure nozzle nozzle structure
已有相关研究表明,相对切深Hf和切槽角α 是影响植保无人机喷雾角的重要指标,具体表现为:切槽角与喷雾角为反比关系;首先相对切深较小时,喷雾角随着相对切深的增加不规律增加,当相对切深达到一定数值时,喷雾角随着相对切深的增加不断减小。相对切深Hf计算如公式(1):
本研究假设植保无人机作业路径为直线,喷头的作业参数见图2。如果2 个喷头同时作业,此时单个喷头需达到的喷幅为S/2。喷雾角β计算如公式(2):
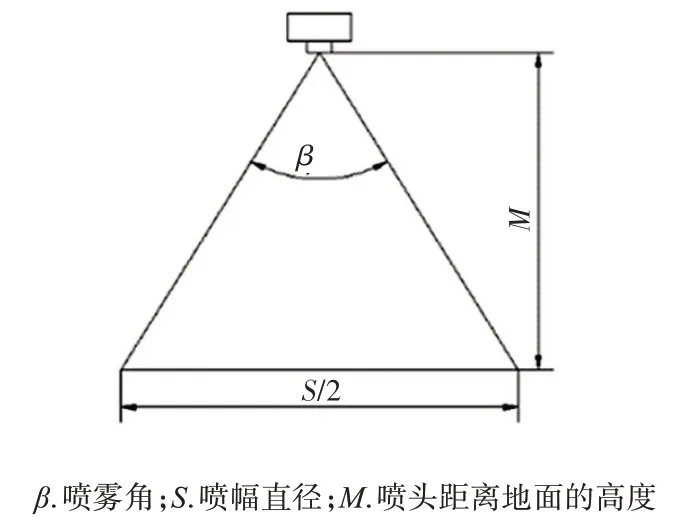
图2 喷嘴喷雾角示意图Fig.2 Nozzle spray angle diagram
将前文设计的飞行参数带入公式(2)计算得出喷雾角为42°。
2 喷头流场仿真
2.1 内部流场仿真
将植保无人机喷头主体封盖,生产计算域。利用Solid-Works 的Flow Simulation 建立算例,自动分析本研究过程中药液流过的区域边界。
将喷头主体连接软管的断面设为喷头的入口,主体地面为出口,见图3。本研究采用泵的最大流速为3 L/min,2 个喷嘴同时喷药,故将入口流速设定为0.000 02 m3/s,出口为静压。通过软件仿真得出喷头主体内部的压力云图,见图3。由图3可以看出,药液在喷头主体底部出口的速度约0.5 m/s,将其设定为对喷嘴外流场分析的初始条件。由图3可以看出喷头内部的厚度和压力大小,可以为喷头结构设计提供参考。
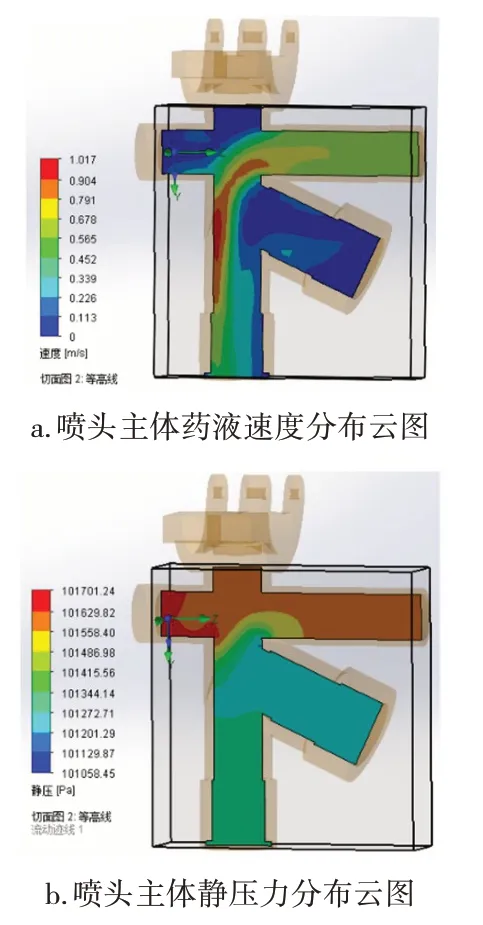
图3 喷头主体内部流场仿真结果Fig.3 Simulation results of flow field inside nozzle body
2.2 外部流场仿真
本研究利用ANSYS 的Fluent 模块对喷嘴外流场进行仿真分析。首先建立喷嘴的三维模型并划分网格,以上文设定的参数为条件,时间步长见图4,通过仿真计算得出喷嘴外部流场雾滴质量分数分布云图见图5。在图5(b)云图取0.25%的质量分数为边界,喷头下空腔直径2 m,测出喷幅约1.37 m,使用2个喷头同时工作能够满足此次设计3 m 喷幅的要求,因此采用该仿真结果对应的喷嘴结构参数H=2.53 mm、D=3 mm、e=0.65 mm、α=42°作为喷嘴设计参数。

图4 喷嘴外部流场迭代计算过程Fig.4 Iterative calculation process of nozzle external flow field
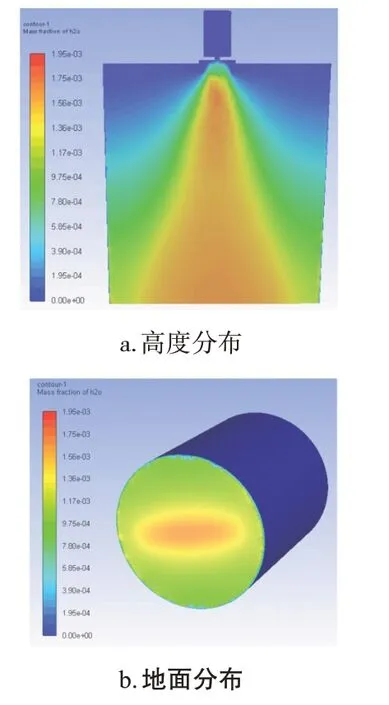
图5 喷嘴外流场质量分数分布云图Fig.5 Cloud image of mass fraction distribution of nozzle outflow field
本研究采用查阅现有研究成果和植保无人机相关资料的方法,设定了仿真初始值,利用ANSYS软件迭代优化得出,当切槽角α为38°时,喷雾质量分布云图见图6。通过分析不同参数仿真得到的质量分数分布云图发现,喷幅不合理、喷雾角较大会导致药液分散、药液漂移等损失增大。

图6 喷雾角过大的喷嘴外流场质量分数分布云图Fig.6 Cloud image of mass fraction distribution in nozzle outflow field with large spray angle
3 结语
本研究采用SolidWorks 和ANSYS 软件,对四旋翼植保无人机喷头结构参数设计与仿真,通过分析仿真结果发现,设定的飞行高度3~6 m、喷幅3 m 的喷嘴参数为:切槽深度为2.53 mm、喷孔直径为3 mm、过心距为0.65 mm 和切槽角度为42°,能够满足植保无人机作业要求,为植保无人机喷洒系统的设计优化提供参考。
陈鹏超研究表明,无人机的作业高度为2.0 m 的有效喷幅宽度是3.46 m,以及作业高度为2.5 m 有效喷幅宽度是4.39 m。说明本研究选取的飞行高度和喷幅宽度合理可行,间接说明该仿真结果具有一定的参考作用。
