基于多源卫星数据的岸线提取与崩岸识别对比研究
2023-11-27陈柯兵董炳江朱玲玲杨成刚李思璇
陈柯兵,董炳江,朱玲玲,杨成刚,李思璇
(长江水利委员会水文局,湖北 武汉 430010)
0 引言
三峡水库蓄水运用后,长江中下游干流河道来沙锐减,河道发生严重冲刷,引起岸坡变陡而失稳,出现崩岸险情,对河岸及已建护岸工程的稳定造成了一定的威胁[1]。据不完全统计,三峡水库运用后,中下游干流河道共发生937处崩岸险情,累计崩岸长度约为701 km[2-4],严重影响了河岸稳定及通航安全[5,6]。
进行崩岸巡查[7],技术人员通常使用目测方式来识别河道主流线、水流顶冲点和漩涡等变动,并观察迎水侧护坡是否存在裂缝、剥蚀和隆起等现象,对已发现崩岸发生的时间、地点、范围、崩岸类型、发展趋势及整治情况、相关图表、照片及所处河段近期演变情况等进行记录并预测其发展态势及崩岸进一步发生可能性大小[8]。实地巡查一年平均开展2 至4 次,频次少、效率低,监测范围极其有限,无法做到对险工险段动态及时感知,并存在溺水、血吸虫病感染等安全隐患。
卫星遥感能够快速、准确地获取地表信息,促进了地表水监测范围、频率和管理控制能力的提高。特别是提取水体岸线和湖泊库区范围的动态变化已成为了卫星遥感技术的普遍应用[9]。赵芝玲等[10]选取“高分一号”卫星数据为遥感数据源,采用面向对象的目标提取技术自动提取了京冀地区海岸带大范围的水边线。殷守敬等[11]结合高分遥感影像,提出了长江岸线提取方法与类型划分体系。袁帅等[12]利用水文资料、遥感影像、野外调查和BSTEM 数值模拟相结合的方法,分析了七弓岭弯道60 余年平面形态变化,颈口上下游的崩岸速率及主控因素,揭示其崩岸过程与机理,证实通过定期观测分析岸线的变化,可以识别出已经发生的崩岸。
在已有研究的基础上,尝试应用卫星遥感水域岸线提取技术,基于我国自主研发的高分辨率对地观测卫星,高分一号与高分二号,国外主流Landsat 8 号、Sentinel-1 号等多源卫星影像,开展河道水域岸线提取与崩岸识别研究,以解决现有崩岸巡查与应急监测技术时效性有所不足的问题,将有力提升重点险工段监测水平。
1 研究数据、区域与方法
1.1 卫星数据
高分一号系列卫星由四颗卫星组成,编号为GF-1 01 至04。其中,01 星于2013年发射,随后在2018年发射了02 至04卫星。卫星上装载了2 台分辨率为2 m 的全色(黑白)/8 m 分辨率的多光谱(彩色)相机,以及4 台分辨率为16 m 的多光谱宽幅(覆盖200 km 范围)相机。高分二号卫星(编号GF-2)于2014年成功发射,是我国自主研制的首颗亚米级空间分辨率的民用光学遥感卫星,装载有2 台分辨率1 m 全色(黑白)、4 m 多光谱(彩色)相机。研究采用高分一号2 m、8 m 以及高分二号1 m、4 m 空间分辨率数据,对拍摄时间为12月18日的高分一号影像(中心坐标E114.2 N30.2、传感器PMS2、数据级别L1A)、12月30日的高分二号影像(中心坐标E114.0 N30.1、传感器PMS1、数据级别L1A)开展了具体分析,并对肖潘崩岸发生前后一个月内与2021年3月的多景影像进行了水域岸线提取结果的对比。
美国航天局于2013年发射了Landsat-8 号卫星,其装载的光学传感器包含11 个波段,其中波段1至7、9 至11 的空间分辨率为30 m,波段8 则为空间分辨率为15 m 的全色波段,装载的热红外传感器TIRS包含两个单独的热红外波段,空间分辨率为100 m。研究采用了2021年12月肖潘崩岸发生后的30 m 空间分辨率数据。
欧洲航天局的Sentinel-1A/B 卫星由两颗处于同一轨道平面的极轨卫星组成,分别于2014、2016年发射。两颗卫星搭载了C 波段合成孔径雷达,具有4 种成像模式,可以全天时、全天候为陆地和海洋提供雷达图像。研究采用了2021年12月肖潘崩岸发生后的4 种成像模式中的干涉宽条幅模式(Interferometric Wide Swath,IW)数据,数据空间分辨率为5 m×20 m。
1.2 研究区域
2021年12月18日,湖北省咸宁市嘉鱼县境内长江右岸簰洲湾河段肖潘段谷洲民垸外滩发生窝崩险情。崩岸长约180 m、崩深约70 m、崩坎高约12 m,窝崩外形呈“Ω”型,估算崩岸体超15 万m³,为1998年以来咸宁江段发生的最大窝崩。崩岸现场图见图1,研究以该处为例探讨多源卫星数据在河道崩岸识别中的应用。

图1 肖潘崩岸险情现场与所在区域示意图Fig.1 Scene of the river bank collapse at Xiaopan and schematic diagram of the area
1.3 研究使用方法
结合不同卫星影像的特点,研究分别选取了3 种方法对水域岸线进行提取。计算平台分别为PIE-Engine 遥感云服务平台、AI Earth 地球科学云平台。两平台基于云服务、弹性计算技术,通过云端按需实时计算,大幅降低计算时间与资源成本,提升遥感数据的处理效率。见表1所示,3 种方法逐一介绍如下。
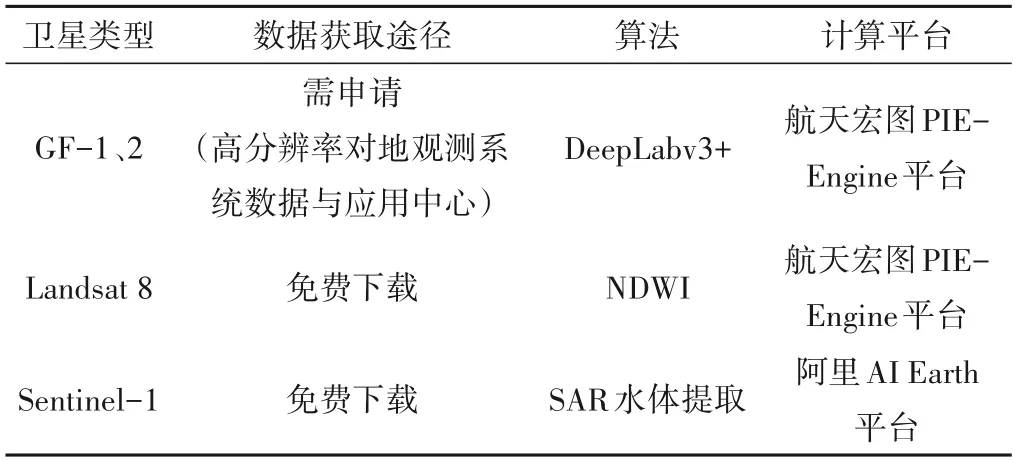
表1 研究使用数据及算法Tab.1 Research data and algorithms used
(1)DeepLabv3+。PIE-Engine 遥感云服务平台目前包含的遥感数据有不断更新的国产、MODIS、Landsat系列卫星数据,以及国家青藏高原科学数据中心、北京师范大学、清华大学服务产品数据等等。
计算机视觉中的语义分割是指在像素级别上对图像进行分类和识别。通过语义分割,我们可以对图像中的每个像素进行分类,图2以判断水体为例进行了展示,水体的像素标记为白色,其他地物则标记为黑色[13]。DeepLabv3+是一种深度学习模型,用于语义图像分割任务,其利用卷积神经网络对图像进行逐像素的分类,将图像中的每个像素分配给特定的类别,例如道路、树木、人物等。相比传统的图像分割方法,DeepLabv3+能够更准确地捕捉到物体的边缘和细节信息,提供更精细的分割结果[14]。

图2 水体语义分割实例[11]Fig.2 Example of semantic segmentation of water
针对水体提取,其取得了良好的结果,详细的应用过程可参考论文[15]。在本研究中,使用DeepLabv3+方法基于PIE-Engine AI中的模型自主训练平台的0.8m_RGBN_水体数据集进行了训练[16]。
(2)NDWI。NDWI(Normalized Difference Water Index,归一化水指数)方法通过计算短波红外波段和绿色波段的反射率差异来区分水体和非水体的指数,通常水体区域的NDWI值较高。论文选择Landsat 8 卫星绿波段B3、红外波段B5,应用PIEEngine Studio 遥感实时计算平台,采用交互式编程方式计算该指数,并利用BQA质量检测波段进行结果的质量控制[17]。
(3)SAR 水体提取。AI Earth 地球科学云平台,集成了Landsat 5/7/8/9、Sentinel-1/2/5P、MODIS、ALOS DSM 等80 多类公开数据集,提供地物分类、变化检测、地物识别、SAR 水体提取等数10 种AI 解译工具,以及指数计算、波段合成、镶嵌裁剪等各类基础处理工具,实现零门槛数据处理分析。可实现利用AI技术智能分析河流湖泊等水域分布及周边建筑等目标信息。
常见的SAR 影像水体提取方法为阈值法、面向对象法和深度学习法[18,19]。AI Earth 平台使用欧洲哨兵Sentinel-1 号、国产高分三号SAR卫星数据为输入,利用AI智能深度学习算法进行解译,对影像中水体进行提取[20]。
2 结果与分析
2.1 多源卫星原始影像图
研究区域不同空间分辨率的高分卫星全色、真彩色影像见图3所示,分辨率为8 m 时,显示结果较为杂乱,地物边界粗糙、难以准确区分;分辨率为4~2 m时,地物分布显示的精细程度明显得到提高;分辨率进一步提高到1 m 后,地物细节更加丰富,边缘清晰光滑,没有明显的锯齿状。影像空间分辨率越高,对地物细节的展现越好。
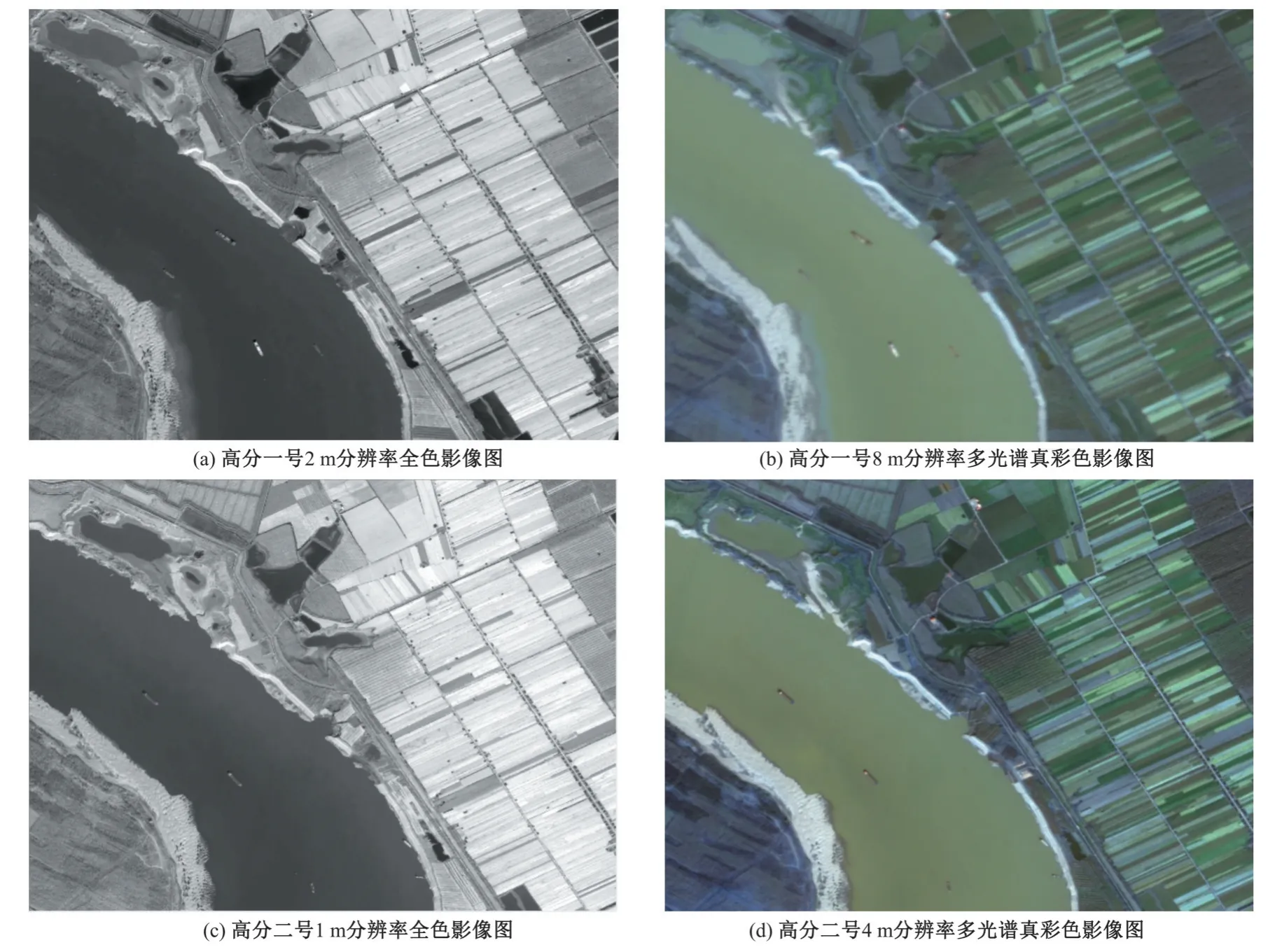
图3 4种不同空间分辨率的高分卫星影像图Fig.3 Gaofen Satellite imagery with four different spatial resolutions
崩岸发生后的Landsat 8 号和Sentinel-1 号卫星影像图见图4所示,从图3、4 成像效果对比可以看出,一般光学影像,如高分一号、高分二号、Landsat 8 号真彩色影像图,通过红绿蓝等波段叠加组合真实直观呈现了拍摄区地物地貌的纹理、颜色等特征。由于Landsat 8号卫星影像的分辨率仅为30 m,其在成像效果、清晰度等方面要远低于国产高分卫星,难以准确区分地物的细节信息,可在结合人工经验的基础上对河道、水塘、农田进行大致的判断。
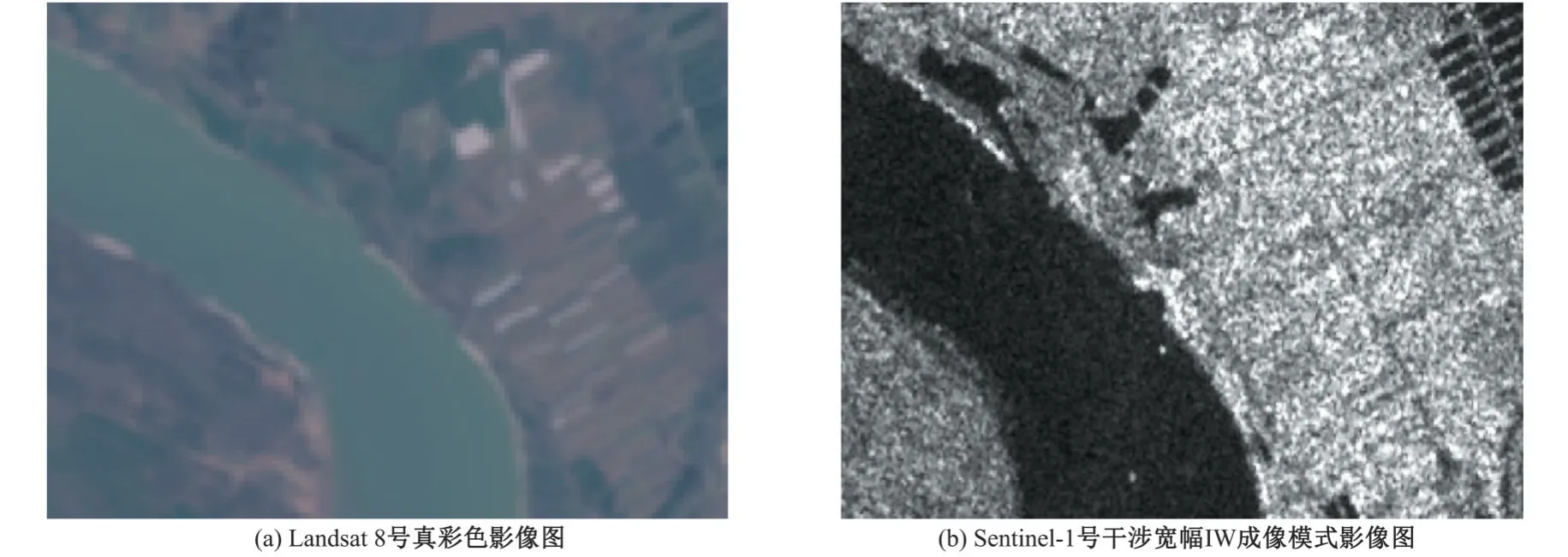
图4 Landsat 8号和Sentinel-1号卫星影像图Fig.4 Images of Landsat 8 and Sentinel-1 Satellites
与光学影像不同,Sentinel-1 号影像属于微波成像,图像显示地物对雷达波束的反映,主要为后向散射形成的信息。一般采用灰度值反映图像信息,地表反射强度越大,灰度值越高,如水面通常呈黑色,森林、田地呈现灰色。SAR 影像的优势在于可以穿透云雨,做到全天时、全天候观测,弥补光学影像易受多云多雨天气影响的不足,其影像图可用于水域识别、耕地动态监测、灾害评估、林业生物量估算等方面。
从图3 的高分卫星影像与图4 的Sentinel-1 号影像中均可以明显直接观察到崩岸的发生,可见各图中位于中央附近的“Ω”型缺口,而Landsat 8 号卫星由于其影像分辨率较低,仅可发现河岸存在缺口,但难以判断崩岸的具体形状。
2.2 水域岸线提取结果对比
3 种方法提取的水域岸线,见图5所示。通过局部及细节处的提取结果可以看出,DeepLabv3+具有良好的水体提取能力,无论是大水体还是小水体,都能提取出平滑的水体边缘,从而在一定程度上显示出水体边缘信息。高分一号和高分二号影像的分辨率均满足岸线变化识别的要求,后者能更准确地反映岸线形态。
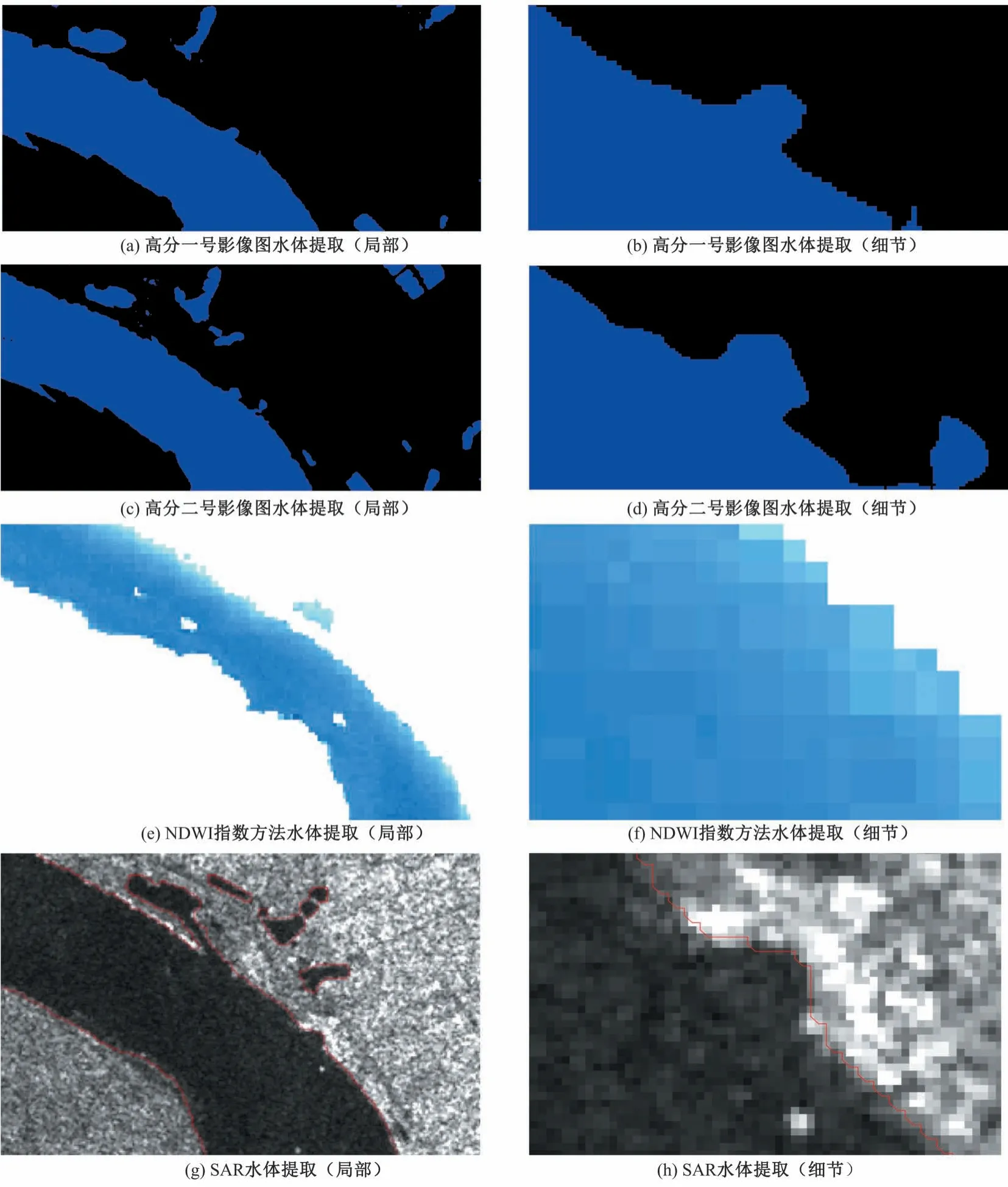
图5 基于3种岸线提取方法的结果对比Fig.5 Comparison of results based on three shoreline extraction methods
NDWI 指数法对大面积水体的分辨能力较强,但对于小水体提取精度较低,并且提取的水体边缘呈锯齿状,无法准确反映边缘的真实信息。SAR 方法对大小水体均有较好的提取能力,对水体边缘的刻画较好。
2.3 崩岸识别能力的讨论
经2.1、2.2 节分析表明,在3 种不同分辨率的卫星产品中,30 m 分辨率的Landsat 卫星采用目视判别与NDWI 指数方法均难以准确对崩岸开展识别。而国产高分卫星、Sentinel-1 号卫星,采用目视判别与对应的岸线提取算法均可较好识别崩岸。特别是DeepLabv3+方法更能反映崩岸后水体的变化。高分卫星8 m、4 m分辨率可以满足崩岸细节识别的要求。高分二号提取的水体边缘更平滑,对崩岸形状的表征更准确。
针对肖潘崩岸局部,4 种不同空间分辨率的高分卫星影像图见图6所示,其中高分一号卫星影像为12月18日拍摄、高分二号卫星影像为12月30日拍摄。经对比,30日的崩岸范围较18日增加,形态为典型的“口袋型”窝崩。崩长和崩宽较大,但口门较小。通过两张图的对比可以发现,18日窝崩开始时,崩塌的地方正对着楔入深槽的堤身土体。随后,原坍塌处附近的堤身土体相继坍塌。随着崩塌范围的扩大,窝崩平面范围也增大,窝崩周边的边坡经过崩塌调整,逐渐趋于稳定,窝崩逐渐减缓直至停止。
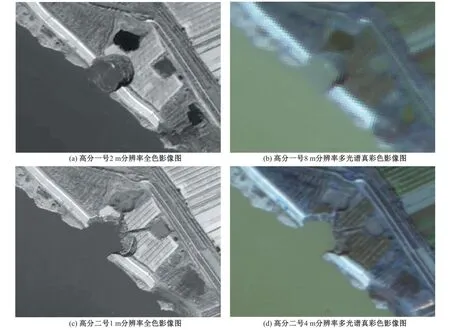
图6 4种不同空间分辨率的高分卫星影像图(崩岸局部)Fig.6 Gaofen Satellite imagery with four different spatial resolutions(local areas of bank collapse)
故在实际的工作实践中,推荐采用高分卫星与DeepLabv3+方法的组合,进行自动化的水域岸线提取;并在多云、雨天气时,采用SAR方法进行补充;必要时,可结合高分卫星、Sentinel-1号卫星影像图,人工开展目视判别。
2.4 自动化的水域岸线提取实例
上述讨论推荐了采用高分卫星与DeepLabv3+方法的组合,进行自动化水域岸线提取的工作流程。通过对多景影像图中提取的岸线对比,见图7(a)中显示的肖潘崩岸发生前后一个月内的水域岸线提取结果,可明显观察到崩岸的扩大。进一步对比肖潘崩岸处河床断面图与3-12月间的岸线变化情况,见图7(b)、(c)所示,体现了崩岸的发生与实测断面变化的一致性。此结果证明了通过自动化定期观测分析岸线的变化,识别出已经发生的崩岸与发现崩岸进一步扩大的技术路线是可行的。
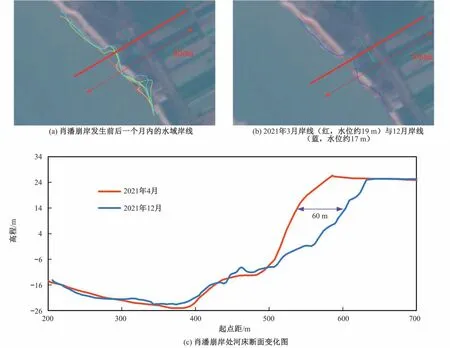
图7 多景影像提取的肖潘崩岸处水域岸线对比及断面变化图Fig.7 Comparison of the shoreline of the Xiaopan collapse area extracted from multi scene images
3 结论
研究使用GF-1、2 号、Landsat 8 号和Sentinel-1 号多源卫星影像作为数据源,结合3 种水域岸线提取方法,DeepLabV3+图像语义分割方法、NDWI 指数方法、SAR 提取方法,对湖北省嘉鱼县肖潘段崩岸进行了识别,研究结果表明:
(1)DeepLabv3+方法具备可靠地提取水体边缘的能力,通过不同时期影像图的对比,由水体边缘的变化反映河岸的崩岸情况。
(2)GF-1、2 号卫星的分辨率已经满足了高精度水域提取的需求,由不同时期影像的对比发现肖潘段窝崩的范围有所增加,该案例说明通过卫星影像对已发生崩岸进行监测,发现其进一步发生与扩大的方案具有实际意义。
(3)在实际的工作实践中,推荐采用高分卫星与Deep-Labv3+方法的组合,进行自动化的水域岸线提取;并在多云、雨天气时,采用SAR方法进行补充;必要时,可结合高分卫星、Sentinel-1号卫星影像图,人工开展目视判别。