自动装车机在聚烯烃立体仓库出库的应用与优化
2023-11-27杨旭李秀军
文 / 杨旭 李秀军
一、引言
目前,国内各大石化企业聚烯烃产品仓储主要采用平面库或立体库形式,产品出库绝大多数仍以人工驾驶叉车整垛装车或人工拆垛装车为主,需要较多叉车工及搬运工作业,人工核对出库物料信息,装车速度慢,劳动强度大,现场作业风险高,长时间作业易疲劳,尤其是在极热或极寒的天气,企业面临招工难的问题,使公司的人力成本及管理成本大幅增加[1]。因此,聚烯烃产品出库装车自动化,已成为各石化企业攻关的热点。
近几年研发的聚烯烃产品出库自动装车方式有多种,如A公司研发的AGV叉车在中科炼化立体库应用,可叉取托盘整垛装车,但其光电激光定位、距离检测、外形检测等流程较多[2],不同场景下装车效率为人工的30%~80%,装车慢且效率低。B公司研发的集装箱整车自动装车机虽效率较高,其占地空间却为普通自动装车机的2倍,一般企业较难有足够的场地,且前期征地成本较高[3]。C公司研发的散袋自动装车机在浙江石化有限公司得到应用,装车速度约22.5吨/小时,同样存在装车效率低、出库速度慢的问题。综合来看,装车速度快、效率高、占地面积小、能叉取托盘整垛装车的自动装车机,更能有效解决企业痛点。
我们现场的聚烯烃立体仓库产品出库装车,已成功应用三种自动叉取托盘整垛装车的自动装车机,其装车速度和效率都高于人工装车,而且占地面积为整车自动装车机的50%。出库装车的自动化,可有效减少出库端人工作业,降低现场作业安全风险,解决出库装车“最后一公里”问题。本文主要介绍了三种自动装车机的系统组成、作业流程、应用过程中改进的问题、应用效果,以及后续改进方向。
二、自动装车机系统布局及组成
自动装车系统主要由软件管理系统及硬件设备组成,各部分分别与立体仓库连接,两者进行信息传递、信号传输及实物料交接。
自动装车软件管理系统主要包括订单列表、作业信息、设备监控等内容,接收仓库管理系统WMS下发的订单信息及每条出库任务信息,记录每车物料的重量信息、托盘信息、任务执行时间及装车完成情况,并将任务执行记录反馈至WMS系统,监控现场设备的运行状态,现场某一设备发生报警则指示灯由绿色变为红色,及时准确反馈报警原因,并提示操作人员处理。
硬件设备包括自动装车机、电控柜、工控机、链条输送机、辊筒输送机、顶升移载机、外形检测设备、RFID信息读取复核设备、视觉检测系统、夹抱整形机、轨道、登车桥安全护栏、道闸及其他辅助设施,由链条输送机与立体库接驳。
图1为三种自动装车机的现场布置图。其中,集装箱自动装车机主体设备为智能小车,立体库来料为1.1米短边方向,经过转向输送机,转位1.3米长边方向叉取,前端取货位满 2托物料时,小车完成一次取货流程,共设置12个缓存位。
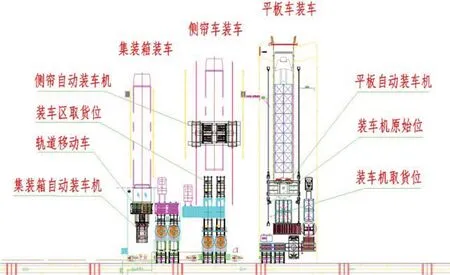
图1 自动装车现场布局图
侧帘自动装车机主体设备为连体双侧双叉自动装车机,立体库来料为1.1米短边方向,经过转向输送机,转位1.3米长边方向叉取,前端取货位满4托物料时,小车完成一次取货流程,共设置14个缓存位。
平板自动装车机主体设备为龙门式装车机器人立体库来料为1.1米短边方向,经过转向输送机,转位1.3米长边方向叉取,前端取货位满2托物料时,小车完成一次取货流程,共设置14个缓存位。
图2、图3和图4,分别为三种自动装车机的现场实物图。

图2 平板自动装车机

图3 侧帘自动装车机

图4 集装箱自动装车机
三、自动装车机作业流程
自动装车的总体流程分为:车辆进厂,司机自助排队打单,WMS系统接收订单信息并分配月台,自动装车系统接单,司机前往现场自动装车月台进行车辆身份认证,认证正确合格,立体库开始执行出库任务,自动装车系统前端输送机接货,自动装车机开始装车,装车完成后将装车信息反馈至WMS系统,出库结束车辆驶离。
自动装车流程总图,见图5。

图5 自动装车流程总图
1.车辆分配流程
物流司机预约进厂后,在自助打单机上自助刷身份证,进行装车排队。自助排队后,WMS系统接收到预约订单信息,根据月台的空闲情况,自动分配订单到装车月台。WMS系统将订单分配到自动装车月台后,将要执行的订单及任务推送给自动装车系统,自动装车系统根据接收的订单信息及任务信息,执行后续的动作。在物流叫号系统的LED屏幕上显示详细的分配信息供司机查看,司机根据LED 显示信息,将货车开到自动装车月台。
2.车辆确认流程
装车前,司机需要在自动装车月台再次刷身份证认证司机及车辆是否对应。认证成功后,道闸自动打开,货车方可倒车进自动装车月台准备装车。若认证失败,则提示司机订单信息错误,禁止装车,需现场巡检人员进行确认处理。
3.出库任务执行流程
WMS系统分配订单后,分解任务信息至仓库执行系统WCS,WCS系统根据任务信息调度立体库设备执行出库任务。立体库与自动装车系统的现场设备通过输送机进行衔接,并通过现场光电及PLC系统传递设备完成信号。物料行走至自动装车系统输送机工位,先进行外形检测及物料信息RFID校验复核,检测合格,进入备货工位,若检测不合格,进入异常处理工位,通过声光报警提示人工确认处理。
当备货工位的物料满足自动装车机的一次行程后,自动装车机开始执行装车动作,完成一次卸货。自动装车上位系统会接收到现场反馈的卸货完成信息,并将此信息传送至WMS系统,WMS根据接收到的完成信息,执行剩余的物料出库任务,循环反复,直至该订单信息的所有任务均执行完成。自动装车系统会反馈装车完成信息至WMS系统,WMS命令该车辆自动驶离,并分配下一个车辆到自动装车月台。
4.各自动装车机动作流程
各自动装车机动作流程,见图6。

图6 各自动装车机动作流程
平板自动装车机采用龙门式装车机器人后装车方式。备货输送机上物料满足2托时,输送机提升至货叉取货高度,货叉同时叉取2托物料,并旋转180°;旋转到位后,龙门式装车机器人行走至车头处,通过激光定位系统及检测光电,判断货物的卸货位置。卸货时货叉先下降再向前推进,确保货物之间排列紧密。卸货完成后,龙门式装车机器人空车后退,后退过程中旋转180°,准备下一循环装车,直至装完订单所需数量实托盘。
侧帘自动装车机采用双叉双侧装车方式,同时适用于平板车及侧帘车两种车型。输送机上的缓存实托盘数量满足后,货叉同时叉取4托物料后收回货叉,抬升货叉并行走至货车车头位置,通过激光定位系统及检测光电,判断货物的卸货位置。卸货时,两货叉对中夹紧,直至托盘中间无间隙。卸货完成后,自动装车机空车后退,准备下一循环装车,直至装完订单所需数量实托盘。
集装箱自动装车机采用智能小车装车方式。输送机上缓存的实托盘先输送至轨道移动车上,轨道移动车运行到指定位置停车。智能小车提升货叉,将轨道移动车上实托盘取下,提升实托盘到一定高度后,轨道移动车后退至输送机位置等待接收下一实托盘。智能小车叉取实托盘进入集装箱内,通过激光测距及视觉检测系统判断其车在集装箱内的位置及周围环境。智能小车到卸货位置后,先侧移货叉使托盘紧靠集装箱边缘,侧移到位后平稳放下实托盘,完成卸货。智能小车空车后退,准备下一循环装车,直至装完订单所需数量实托盘。
四、自动装车机应用成效
自动装车机的应用,相较人工装车方式,主要有以下优势:
1.出库装车采用自动装车方式,出库装车现场只需要安排 1 人定时对出库月台轮流进行巡检,另安排 1 人配合处理设备报警。如果采用人工驾驶叉车整垛装车或人工拆垛装车的方式,每个月台需配置 3 至 6 人,相较之下自动装车方式可大幅降低出库装车现场的人员配置及人力成本。以13个出库装车月台核算,自动装车系统的人员配置比人工叉车装车少 35人,费用节省 461 万元/年,比人工拆垛装车人员配置少 74 人,费用节省 885 万元/年,详见表 1。

表1 各装车方式人员配置及人力成本
2.自动装车速度最快可达18分钟/车,人工驾驶叉车装车速度约30分钟/车,人工拆垛装车速度约40分钟/车,自动装车比人工驾驶叉车装车速度快约12分钟,效率提高约40%,比人工拆垛装车速度快约22分钟,效率提高约55%,详见表 2。

表2 各装车方式装车速度
3.自动装车机作业时处于一个完全封闭无人化的状态,四周有安全护栏、安全联锁门、急停按钮等防护设备,人员进入自动装车区时设备会自动停止,正常运行时无需人工参与。只有当设备故障时,通过声光报警的方式,提示人工去确认处理,处理前需停止设备,有效规避人机交叉作业的安全风险。出库端减少人工及叉车的高频重复作业,同时降低人工现场作业的叉车伤人安全风险。
4.自动装车月台占地面积小,对于土地资源紧缺的城市,自动装车可减小现场实施场地。在立体库出库端,人工叉车装车位需占地面积约 480 平方米,而自动装车的装车位占地约 240 平方米,占地可节省约50%。
5.出库装车采用自动装车机的方式,出库时通过 RFID 自动校验出库物料信息与订单信息是否一致,自动根据订单数量进行装车,可以减少人工复核的人员用工和产品出库错误的问题。
五、应用过程中已优化的问题
自动装车是由人工装车转为机械化的过程,其装车效率高、人力成本低,但其装车灵活性低于人工装车。因此,对外来物流车辆的要求较高。但外来的物流车辆标准不统一,车辆的外形尺寸多样,车辆的高度和宽度均存在差异,车况形式复杂。针对以上问题,现场已解决以下两大问题,并取得较好使用成效,装车适应性得到较大提高。
问题1:高低板车车身高度分为两部分,与自动装车货叉升降高度无法匹配。
解决方式:现场运行过程中,为解决高低板平板车装车问题,优化平板及侧帘自动装车机的货叉升降适应高度,使其升降的高低极限行程大于高低板平板车。在自动装车机上增加高低板车辆检测光电,通过检测光电计算出高低差,判断高低板位置。同时优化控制程序,在HMI(人机界面)上设置平板车及高低板车两种装车模式,系统根据选择的不同车辆模式,自动调整自动装车机的停车位置,使其能适应不同高度车底板高度的物流车辆。优化后,现场可使用自动装车机进行装车的货车数量,提高约10%。
问题2:不同车辆的车况不同,部分车辆栏板能全部打开,也有部分车辆将后栏板焊死无法打开,装车过程中很容易使产品包装破损,导致部分车辆无法适应自动装车系统,立体仓库的车辆调度系统无法自动分配车辆到自动装车月台。
解决方式:为使自动装车月台能够自动分配车辆,避免部分平板车栏板无法打开导致装车过程破包,在WMS系统中建立一个自动装车月台的内部数据库。首先现场人工确认获取货车的车辆信息,对于能适应自动装车的车辆,将其车牌信息维护至车辆信息数据库,当WMS系统接收到此车辆牌号的订单时,会自动优先分配其到自动装车月台,有效避免无法使用自动装车机的货车被分配到自动装车月台的情况。
六、应用过程中待改进的方向
为进一步降低企业运营成本,仍需缩减操作人员数量及物流费用,并进行持续优化,解决以下两方面问题:
重点1:现场确认车辆尺寸信息,使人工操作工作量增加。
改进思路:为降低现场车辆人工确认的工作量,在进出厂物流预约系统设置物流车辆数据,并与WMS系统及TMS系统通过接口字段进行关联。当WMS系统获取的车辆数据符合自动装车机时,通过TMS系统将此车辆分配给自动装车月台;当车辆信息不符合自动装车要求时,将其分配至人工月台,从而有效降低现场车辆确认的工作量。
重点2:目前聚烯烃立体库出库应用的自动装车机装车能力为27吨/车,每排9托共18托,相比30 吨/车的人工装车能力 ,每车亏 3 吨,使企业物流成本增加。
改进思路:为解决自动装车的“亏吨”问题,可对自动装车机进行改进,提高装车能力至30吨/车。首先,根据不同类型自动装车机特点及托盘物料尺寸,优化平板车上物料的摆放方式,平板车两侧侧方装车的自动装车机,可采用单侧1.3米9托及1.1米11托的放置方式;平板车后方装车的自动装车机,可采用1.1米、1.3米组合的“回”字形放置方式,两种方式均能满足通用平板货车装30吨的需求。其次,优化自动装车系统前端输送流程,增加托盘转向设备、物料整形设备、托盘并垛设备,优化设备控制程序,使其能够按照订单需求控制托盘的叉取方向及数量。优化自动装车机货叉,使其具备推出功能,在卸货时可推出物料,缩小物料间距离,确保装车垛型整齐。
七、结束语
聚烯烃产品出库装车,打破传统人工驾驶叉车整垛装车或人工拆垛装车方式,采用无人化自动装车机进行装车,最快用时可达到18分钟/车,平均每托产品用时1分钟,实现自动出库装车的高效与安全,有效解决聚烯烃立体仓库出库“最后一公里”的难题,实现真正的自动化、无人化,提升企业的自动化和智能化水平。
不过,目前应用自动装车机,每车只能装载27吨共享托盘,装车能力不足导致的“亏吨”问题使企业物流成本增加。因此,自动装车机仍需继续改进与技术攻关,实现自动装车30吨的目标,从而帮助企业进一步降低物流成本。
