南山矿铁路运输行车安全预警系统建设与应用
2023-11-26杨小江何先文朱春山陈宗援
杨小江 何先文 朱春山 陈宗援
(安徽马钢矿业资源集团南山矿业有限公司)
当前,随着信息技术的发展,机车运行安全和设备监测系统正朝着集多功能安全监测模块于一体的大型平台化、系统化的方向发展,国内各类新型机车目前也广泛运用具备高效传输、统一存储、智能化人机交互界面的车载安全防护系统及其地面专家系统,这些车载安全防护系统正在国内电力机车、内燃机车、调车机等车型上进行工程化应用,为解决机车运用中最突出的安全问题提供了有效技术支撑。露天矿山由于其特殊的运行环境,老式的机车设备缺少必要的安全防护系统,使得行车安全成为企业生产的短板,需要对现有铁路运输设备进行改造升级,从而达到安全行车的目的。
1 南山矿铁路运输现状
南山矿作为国内大型露天矿山,同时也是近城矿山,其内部运输(采场—选厂、采场—排土场)主要采用铁路运输方式,其铁路运输线路全长约50 km,经过多个村庄道口,铁路线为开放式线路。运输设备为传统的ZG150—1500型直流电力机车和KF60型自翻矿石敞车,运行过程中电机车连挂9节自翻车在单行轨道上进行往返作业,其平均运行速度达25 km/h。为保证电机车安全稳定运行,单台运行车组配置3人(正副驾驶员各1 人,调车员1 人)。牵引作业时,由驾驶员观察前方道路情况并控制电机车;推进作业时,由于车组较长(约120 m),驾驶员无法观察到行进方向道路情况,主要依靠车组尾端翻斗车上的调车员给驾驶员相应的信号。
南山矿铁路运输电机车安全运行存在巨大的挑战:一是铁路线途经大量村庄和道口,且铁路线上日常维护人员较多,人员或异物入侵铁路线时有发生,行车过车中如不能及时发现并停车将产生严重后果;二是在长周期作业情况下,操作指挥人员容易产生思想麻痹或精力不集中的情况,也将严重影响行车安全;三是调度指挥人员无法及时掌控电机车运行状态及位置,影响运行指挥效率;四是现有电机车因制造年代较久,缺少机车运行安全和设备监测装置。随着行业和技术发展,以及企业减员增效和安全生产要求,传统的电机车和人工驾驶模式需要升级改造,逐步向智能化和无人化方向发展。
2 预警系统功能要求
为提高露天矿山电机车行车安全,减少事故的发生,同时为露天矿山电机车无人化奠定基础,电机车行车预警系统改造参照国内外关于车载安全防护系统设计理念,并针对南山矿铁路运输场景实施。
电机车行车安全预警系统主要从防火监控、视频监控、目标识别(行车防撞)、超速监控4 个方面对电机车行车提供安全预警,还为电机车行车信息预留数据接口,为物联网无线数据传输提供技术支撑。为此,行车安全预警系统由中央处理平台和4个子系统(防火监控子系统、视频监控子系统、行车防撞子系统、GPS 测速子系统)构成。中央处理平台对各子系统进行数据集中、数据管理,并对数据进行综合分析;各子系统遵照统一的通信协议,与中央处理平台通讯[1-4]。
2.1 防火监测子系统功能
该系统由防火监控板、前端探测设备、连接器和线缆组成,其点型感烟探测器具备漂移补偿、污染自动识别和报警功能。系统具备注册登录功能,注册登录完成后能自动识别在线设备的类型。系统实时监测机车高压室的烟雾、热量等物理量,超过限值时发出火灾报警信号;当发出火警时,由中央处理平台在音视频终端上显示火警区域并发出语音报警;同时具备人工消除当次报警功能。系统实时采集前端探测设备(视频、激光雷达、传感器等)状态信息,并能将状态信息实时分析处理,从而判断电机车设备的正常、火警、故障、短路等状态。
2.2 视频监控子系统功能
该系统能实时采集电机车司机室前方路况、电机车电弓情况、电机车两侧车身情况、电机车车组尾端翻斗车前方路况图像,系统根据电机车行车信号的变换(牵引行车、推进行车),可自动切换行车视频图像(牵引行车时主要显示电机车司机室前方路况,推进行车时主要显示尾端翻斗矿石敞车前方路况),也可手动切换视频图像,可切换多画面显示模式及单画面显示模式。系统具备视频图像存储能力,存储视频图像时间最短不少于10 d。视频存储采用滚动方式,当占用的存储空间达到上限时,自动覆盖早期的视频数据;存储的视频图像可以在音视频终端进行本地回放,并提供下载功能。当有报警事件时,系统可进行相应语音报警,包括火警提示、行人提示及超速提示等。电机车车组调整时,系统主界面可以与新挂接的尾端翻斗车的视频装置进行自由配置。系统具备查看监控数据、运行记录及历史记录功能。
2.3 行车防撞子系统功能
该系统利用计算机视觉及深度学习技术,实时检测电机车车身四周及电机车行进方向路况的视频图像。当检测到有可能影响行车安全的行人及异物时,及时发送预警信息,利用音视频终端发出语音报警提示,在视频画面上标注车身四周出现行人或异物的位置,在视频图像上用红框提示行人位置且显示行人与机车之间的距离信息。
2.4 GPS测速子系统功能
该系统通过GPS 模组,结合电机车运行的电子地图,实时获取车辆行驶速度及坐标。系统通过设置电机车各区段的最高行驶速度,在电机车超速时,及时发出超速的语音提示。
3 行车预警改造方案
3.1 系统方案
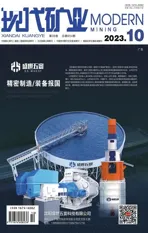
南山矿现有的ZG150-1500 型直流电力机车为两端拼接结构,具有双驾驶室,驾驶室空间位置狭小。牵引作业时驾驶员在前端驾驶进行操作,推进作业时驾驶员则在连接自翻车一端的驾驶室进行操作。同时,考虑到电机车行驶轮轮缘磨损,电机车将定期掉头。因此行车预警改造时需要在电机车Ⅰ端及Ⅱ端都安装相应的视频监控及检测显示装置。考虑电机车推进作业时要实时掌握车组尾端的路况,需要对尾端自翻车进行改造,安装相应的视频检测设备。电机车行车预警设备改造安装方案如图1 所示。
3.2 主机安装
主机是行车预警系统的数据处理及控制单元,由于ZG150-1500 型直流电力机车为双车拼接结构,需要在电机车两端司机室各安装1 台主机。考虑空间限制及使用特点,2 台主机的功能不完全相同。一端主机安装在司机室衣帽柜内,一端主机从二端主机输出插取DC24 V电源,并分别给一端显示屏、一端摄像机提供DC12 V电源,主机内装有图像处理板、机车信号接收板、交换机、硬盘等部件。二端主机安装在二端司机室衣帽柜内,二端主机从机车48 V 蓄电池闸刀后端进行取电,并分别给二端主机提供DC24 V 电源,为二端显示屏及二端摄像机提供DC12 V 电源,主机内装有中央处理平台处理板、防火监控板卡、交换机、硬盘等部件。
3.3 音视频终端安装
音视频终端是行车预警系统的人机交互终端,安装在司机室操作台平面调车系统的上方,便于司机查看及操作。两端司机室各安装1台音视频终端,并在其中1台音视频终端内部装有GPS模组。
3.4 网络摄像机安装
为实现电机车运行行车过程中的实际检测,电机车行车预警系统改造中安装了多只摄像头,实现各自功能。
(1)电机车路况摄像机。每台电机车在两端车头中间的位置分别安装1 只长焦路况摄像机及1 只广角路况摄像机,用于观测行车前方路况,视频检测距离达到200 m。
(2)电机车车身摄像机。每台电机车在两端车身底部两侧分别安装1只广角路况摄像机,实现了对车身四周的视频监控。
(3)电机车电弓摄像机。每台机车在两端车顶朝向电弓的位置安装1 只摄像机,用于观察电弓状态。为避免电弧对设备的影响,摄像机加装防护罩。
(4)尾端自翻车摄像机。在电机车车组尾端自翻车车顶棚下方的位置分别安装1 只长焦路况摄像机及1 只广角路况摄像机,通过无线网桥传输方式,将视频信息实时传输到驾驶室音视频终端。
3.5 高压室防火监测装置安装方案
电机车高压室存在大量电器设备,使用过程中容易发生火灾,为提前预计,每台机车在高压室接触器上方安装点型感烟探测器,高压主线位置缠绕感温线缆,在高压室背墙安装中间接线盒及终端盒,实时掌握高压设备状态。当高压室发生火灾或高压主线温度过高时,通过音视频装置进行报警提醒。
3.6 无线网桥安装方案
为实现行车预警系统电机车主机与车组尾端守车摄像机之间有效的通信连接,由于有线方式无法实现,选用无线网桥方式进行无线网络连接。在电机车车顶位置和并车组尾端自翻车的车墙壁上分别安装1只无线网桥。
4 行车预警系统应用效果
目前,南山矿12 台ZG150-1500 型直流电力机车及12 台尾端守车已全部安装行车预警系统,运行效果良好,电机车驾驶员通过行车预警系统能够方便快捷地掌控机车运行状况,有效降低电机车行车风险。
(1)通过无线网桥电机车主机能够方便地与新挂接的尾端翻斗车的视频装置进行自由配置,实时显示车组尾端画面。
(2)驾驶员通过摄像机能够实时观察电机车周边的环境,并可以根据需要在人机界面上选择需要重点关注的画面。视频画面显示效果如图2所示。

(3)行车预警系统利用计算机视觉及深度学习技术,实现了对可能影响行车安全的行人及异物进行判断和预警提醒。
(4)实现了电机车运行速度、温度及烟雾的报警提醒功能。
(5)利用行车预警GPS 模组,并通过物联网技术,将电机车运行状态(速度、位置、防火检测)等信息有效地传输到调度集控室,提高了集中调度效率。
5 结语
(1)传统ZG150-1500 型直流电力机车行车安全预警系统能够有效提高行车中的安全性,满足了露天矿山行车要求,具有很好的推广价值。
(2)车组尾端自翻车视频信号利用网桥传输方式,视频延时较大,不能满足未来电机车自动驾驶或无人驾驶的需要,需要利用5G技术降低延时。
(3)利用信息化、自动化技术提高矿山运输设备智能化水平,保障设备运行安全,是矿山企业实现高质量发展的必由之路。