基于二维机械式扫描声呐的桥梁水下桩墩表观缺陷检测试验研究
2023-11-25林晓威
林晓威
(福州市公路事业发展中心,福州 350002)
0 引 言
桩墩承载桥梁上部结构的荷载并将荷载传递至地基,是桥梁的重要组成部分。水下桩墩长期受水流等因素侵蚀,容易发生孔洞、露筋等问题[1],导致承载力下降,影响结构安全和耐久性[2],需要对其进行检测并对水下病害结构进行加固[3-5]。我国现行规范规程[6-7]规定每3~5年应对桥梁水下桩墩进行一次检测,对于水流湍急、基础埋深浅等不利环境下的桥梁还应提高检测频率。目前,桥梁水下桩墩病害检测主要通过潜水员目测进行,其主要缺点是人工水下作业时长受限以及桩墩周边存在的漩涡会威胁潜水员安全,此外该方法准确度还受到潜水员自身专业素养因素的影响。针对上述问题,国内外学者提出可采用水下潜航器搭载水下光学成像设备代替潜水员目测。谢文高等[8]使用水下机器人搭载双目相机对清水中混凝土结构进行表面裂缝扫描,结合图像处理技术对裂缝宽度参数进行计算;Hirai等[9]使用ROV(Remote Operated Vehicle)系统配合地面基站通过水下相机拍摄大坝表面缺陷,可以确定缺陷尺寸和位置。虽然上述研究通过改进,避免了人工潜水的安全问题,但其仍然基于光学成像,成像效果依赖于光照和水质条件。
声波在水中传播衰减程度远低于光波,且具有良好的穿透性,故其成像基本不受弱光与浑浊水况的影响。近年来采用声呐对桥梁水下桩墩的孔洞和剥落[10-13]、冲刷[14-16]、裂缝[17-18]等表观缺陷进行检测时有报道。然而,由于声波波长较大,其对物体表面细微变化的敏感度不如光波,因此声呐在桥梁水下桩墩表观缺陷检测方面的研究大都仅为定性判别,定量识别相对较少,而对于缺陷成像是否准确(即成像准确度)的研究更是未见报道。成像准确度指的是声呐图像中物体的识别尺寸与物体真实尺寸的差距程度。现有针对声呐成像准确度的研究大多集中在鱼体长度的测量方面。Burwen等[19]采用DIDSON声呐对18条体长为60~120 cm的鱼进行扫描,对获得的声呐图像中鱼体成像长度进行测量,发现声呐图像的鱼体长度与实际长度的平均误差大约为5 cm,其中当鱼体轴线与声呐波束中心线垂直时测量结果最精确,偏离角度过大时误差甚至会超过15 cm;Daroux等[20]采用DIDSON声呐获得的鱼体长度存在约3.09 cm的误差,并且鱼体相对于声呐波束的角度对误差的影响十分显著。另外,从声呐成像原理来看,扫描距离(声呐和待测物体的直线距离)越大,图像中单个像素点对应的尺度也就越大,成像误差也就随之增大。从以上分析可知,声呐成像的准确度和两个因素密切相关:扫描距离和俯仰角度(声呐位置的水平线与声呐和试件连线的夹角)。
二维机械式扫描声呐是由声呐头换能器旋转成像,通过向目标发射声波,接收器接收物体反射的声波,将声信号转化为电信号,根据信号时延和强度转化为图像。每旋转一个步进可以在图像上获得一条直线,通过换能器不断旋转由线成面形成二维图像(图1)。由于二维机械式扫描声呐是通过接收波束范围内物体反射回波信号成像的,所以不能判断相同距离波束范围内的不同物体,因而只能形成二维图像,不能像三维图像数据那样直观展现目标的缺陷状态。
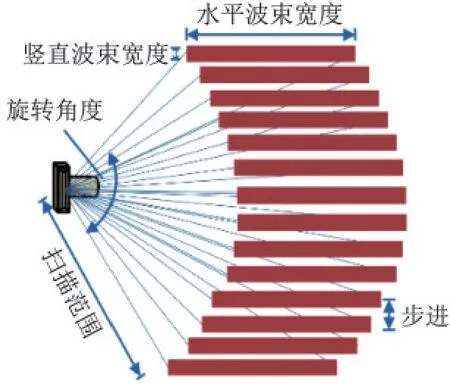
图1 二维机械式扫描声呐成像Fig.1 Two-dimensional mechanical scanning sonar imaging
基于以上考量,本文通过实验室试验研究,力图达到两个目的:①在一定成像准确度要求下,探明二维机械式扫描声呐对桩墩表观缺陷进行成像时的较佳扫描距离范围和俯仰角度范围;②对目标进行测点布设获取完成声呐图像信息,通过三维重构建立水下桥墩的三维模型。
1 试验概况
1.1 试验构件设计
为使试验合理并且结果直观,将准确度试验构件的病害类型设计为剥落病害,同时根据《建筑桩基技术规范》(JGJ 94—2008)[21]规定的水下灌注桩的主筋混凝土保护层不得小于50 mm,将剥落深度分别设置为10 mm、20 mm、30 mm、40 mm、50 mm。试件为半径0.2 m、高0.6 m的半圆柱体混凝土柱,为模拟桩墩病害扫描,剥落缺陷设置在半圆柱形构件的圆弧面,如图2所示。
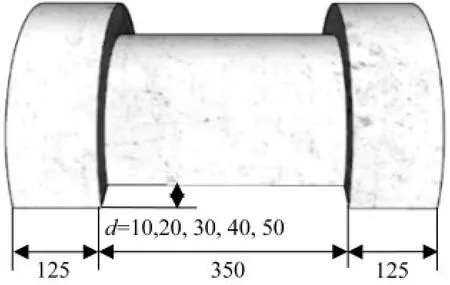
图2 剥落试件模型尺寸(单位:mm)Fig.2 Model size of spalling specimen (Unit:mm)
三维重构桩墩构件采用直径490 mm、高150 mm的桥墩模型构件,根据实际桥墩的常见缺陷类型,在构件表观设置露筋孔洞缺陷及剥落缺陷,孔洞最大深度为113 mm,剥落深度为40 mm,详细尺寸如图3所示。
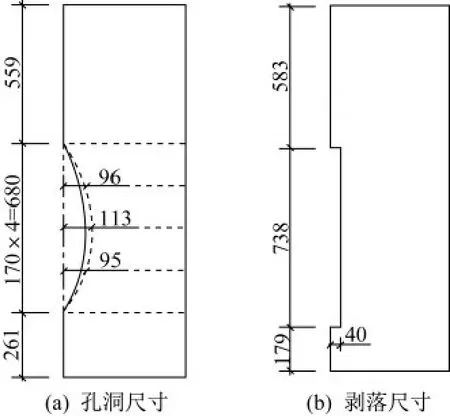
图3 桩墩模型缺陷尺寸(单位:mm)Fig.3 Defect size of reconstructed component (Unit: mm)
1.2 试验构件声呐扫描
试验在长7.1 m、宽5.1 m、深1.5 m的试验水池进行,声呐设备采用Kongsberg1171二维机械式扫描声呐头,同时使用MS1000声呐扫描系统进行操控,如图4所示。声呐的扫描频率越高,声成像分辨率越高,为达到最佳扫描分辨率,声呐工作频率选定为该设备的最大扫描频率1.2 MHz,相应的水平波束角度为28°。
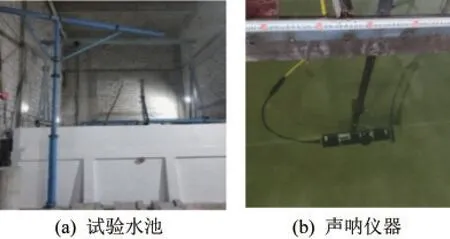
图4 试验装置Fig.4 Test setup
准确度试验过程中,构件放置在水池的一侧,声呐仪器放置在与试验构件同一轴线的另一侧位置,如图5所示。靠近声呐一侧的试验构件边缘与声呐之间的水平距离称为水平扫描距离l,声呐与靠近声呐一侧的试验构件边缘中点的连线和水平轴线的夹角称为俯仰角度ω。分别在水平扫描距离为0.5 m、0.75 m、1.0 m、2.0 m、2.5 m、3.0 m、3.5 m、4.0 m、4.5 m、5.0 m时,俯仰角度为0°、10°、20°、30°、40°、50°、60°时进行声呐扫描。

图5 剥落试件声呐扫描Fig.5 Sonar scanning of spalling specimens
重构试验中,试件放置于水池中央。综合考虑桥墩模型的缩尺尺寸及成像精度要求,选择水平扫描距离l= 0.5 m,为对桥墩进行完整的声呐成像采集,在桥墩环向均匀布置7个测点,如图6所示。试验时从0°点开始成像,待声呐头旋转360°后完成该测点扫描,逆时针旋转试件51°进行下一测点的扫描,直至7个测点全部扫描完成。

图6 三维重构试件声呐扫描(单位:mm)Fig.6 Sonar scanning of 3D reconstructed specimen(Unit: mm)
2 试验结果与分析
2.1 准确度分析
每一个测点获得一张剥落声呐图像,总计约两百张声像图。由于声呐图像中每一个步进范围内无法区分同一竖直波束宽度范围内的物体,导致声呐图像竖向高度误差会受换能器步进角度大小和距离的影响,步进角度越大影响越大、距离越远影响越严重,所以未对竖向高度精度进行分析。从所获得的声像图可以发现,剥落病害在声像图中呈现矩形状特征(外轮廓线与内轮廓线之间的黑色区域),通过MS1000软件将声呐数据导出为bmp图片,然后将图片导入AutoCAD中量取测量试件外轮廓与剥落病害轮廓线的距离记为实测剥落深度,如图7所示。
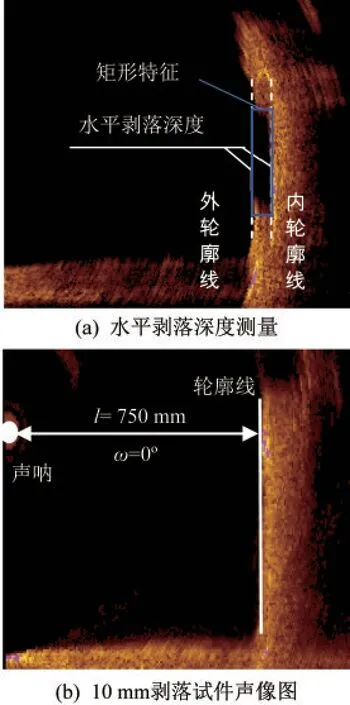
图7 剥落试件声像图Fig.7 Sonar image of spalling specimen
不同剥落深度的相对误差程度不同,为统一分析,限定误差阈值为5 mm。对每一张声像图进行剥落深度测量,记录每张声像图中实测水平剥落深度绘成图8,其中10 mm剥落构件声像图中未能找到明显病害特征,无法测量剥落深度,未进行分析。当扫描距离在3.5 m以内时,能够识别的构件最小剥落深度尺寸为20 mm;当扫描距离在4 m以内时,能识别的构件最小剥落深度尺寸为30 mm;当扫描距离在5m以内时,能识别的构件最小剥落深度尺寸为40 mm。
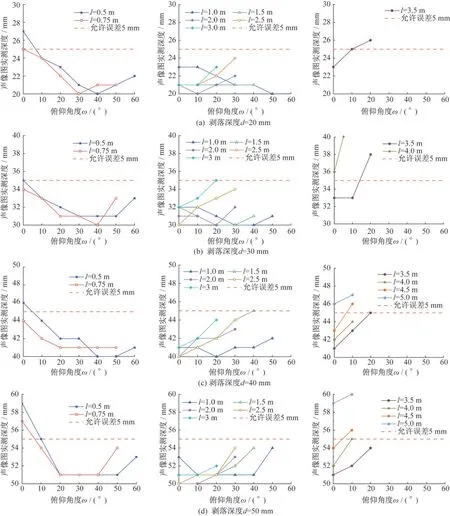
图8 声像图实测剥落深度Fig.8 Measured spalling depth in sonar images
从图8可见,对同一试件,剥落深度实测值随水平扫描距离变化而变化,当水平扫描距离小于1 m时,由于声呐仪器近距离存在畸变导致误差声像图实测值与真实值相差较大,而随着俯仰角度的增加,声呐与试件直线距离增加,畸变逐渐减少,测量尺寸逐渐接近真实数值,但当俯仰角度超过50°时,由于俯仰角度过大,测量值会逐渐远离真实值;剥落缺陷的声呐成像在水平扫描距离为1 m~3 m时效果较好,实测值与真实值误差在5 mm以内,这表明在该范围内畸变对成像影响较小,而误差大小仍随俯仰角度增大而增加,因此在扫描距离超过畸变影响范围时,扫描过程中需要对俯仰角度进行限制,尽可能在俯仰角度小于50°时成像,此时声像图缺陷大小与实际相差不大;而当水平扫描距离超过3.5 m时,由于扫描距离较远,成像质量降低,测量误差也随着声像图像素宽度的增大而增大,实测结果与真实结果相差较大。
2.2 桥墩三维重构
根据测点布设方案对重构试件进行声呐成像,获得如图9所示的各测点对应的声像图。当测点声呐扫描区域没有缺陷时,声像图中桥墩试件成像左右轮廓无明显直线转折,如图9(g)所示;当测点扫描区域存在缺陷时,声像图中的桥墩成像轮廓均有不同程度的内凹或外凸。如图9(a)所示,桥墩目标在声像图上的左侧轮廓曲线内凹,右侧轮廓曲线外凸,说明桥墩在该区域存在表观缺陷,且根据缺陷轮廓可以判断其为曲线轮廓的孔洞类缺陷,同时声像图中试件左侧轮廓存在的竖向现状特征为孔洞裸露的钢筋。图9(e)目标右侧轮廓呈现直线外凸,说明该测位存在剥落缺陷,且缺陷位置偏离声呐扫描区域中心线,与图6(b)测点布设一致。同时,对桥墩试件进行成像时,仅需7个测点就可对该试件完成成像,同时每个测点的声呐扫描试件仅需3 min,可以快速完整获取桥墩的表观声像图。

图9 桥墩重构试验声像图Fig.9 Sonar images of bridge pier reconstruction test
针对孔洞缺陷,将孔洞范围四等分,获得5个分析截面。针对剥落缺陷,因剥落内部较规整,且孔洞缺陷已取3个截面,剥落范围内不再另行分割,只取其起止截面,共2个分析截面。此外,桥墩上下底面各取1个截面。因此,整体将重构部分的柱子分割为10部分,共有9个分析截面,如图10所示。

图10 重构截面示意图(单位:mm)Fig.10 Sonar image of bridge pier reconstruction test(Unit: mm)
通过每一个测位声像图中缺陷成像特征,根据二维机械式扫描声呐成像原理,判断每一个截面在该测位时的缺陷轮廓,并根据相邻测位还原的缺陷轮廓分析该截面的整体轮廓,获得每一个截面的重构截面(图11)。然后由重构截面,通过AutoCAD软件的放样功能还原出水下桥墩的三维表观模型,如图12(a)所示,图12(b)为桥墩实际表观图像。由于重构对象为桥墩水下部分,因此重构模型不包括桥墩水面之上部分。

图11 桥墩重构截面Fig.11 Reconstructed section of bridge pier

图12 三维表观重构效果对比图Fig.12 Comparison of the effect of three-dimensional apparent reconstruction
为对比重构截面与实际截面的误差程度,分别计算P3、P4、P5、P6重构截面与实际轮廓截面中孔洞缺陷的面积和周长大小(表1)。4个截面中,对于孔洞缺陷,最大面积误差为8.65%,最大周长误差为5.67%。而剥落缺陷测量结果较为稳定,仅对P5截面进行轮廓对比,重构周长误差为5.38%,重构面积误差为9.16%。由此可见,通过二维机械式扫描声呐的二维声像图能够可靠地重构出目标的三维模型。
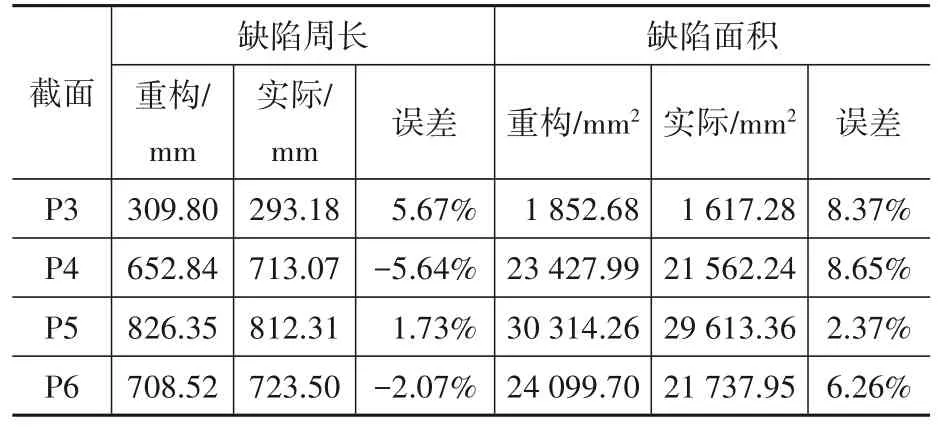
表1 孔洞缺陷误差表Table 1 Hole defect error table
3 结论与展望
(1) 该二维机械式扫描声呐能够对剥落深度不低于20 mm的缺陷进行准确成像,在水平扫描距离为1~3 m且俯仰角度为0~40°时,剥落深度成像尺寸与真实尺寸之间误差小于5 mm,并且能够以相邻点信息互为补充,将水下桥墩的二维扫描图像重构为三维模型,扫描速度快且效果好。
(2) 本文仅对剥落和孔洞缺陷进行了声呐扫描,且孔洞由于形状不规则未进行参数分析,后续试验需要考虑更多的缺陷种类。水下桥墩三维重构是采用人工进行重构的,费工费时,未来将通过软件自动识别图像进行三维建模。
