基于VR 技术的船舶航行视景数字化三维建模
2023-11-24辜昕宇刘传谊
辜昕宇,曹 锋,刘传谊
(江西师范大学科学技术学院,江西 南昌 332020)
0 引 言
目前,对船舶航行视景数字化的相关研究较少[1-2]。陈立家等[3]提出航海模拟器视景快速建模方法,利用倾斜摄影方式采集船舶视景图像后,实际应用过程中受船舶视景图像倾斜角度、清晰度等因素影响,导致该方法建立的船舶视景模型逼真度不足。赵盼等[4]提出Creator 的视景建模方法,该方法以Creator 软件为基础,并结合TerraVista 软件,建立船舶虚拟环境视景仿真模型。该方法在实际应用过程中无法及时呈现船舶运动状态,因此应用效果不佳。
为了解决上述问题,本文提出基于VR 技术的船舶航行视景数字化三维建模方法。
1 船舶航行视景数字化三维建模
1.1 船舶航行视景数字化三维场景节点组织设计
船舶航行环境由水文、航道条件、港口设备等组成,对于船舶航行视景数字化三维场景来说,主要建模的对象包括视觉可见部分、水体、不同种类地标物、船舶等,设计以上不同三维场景的节点组织,如表1 所示。
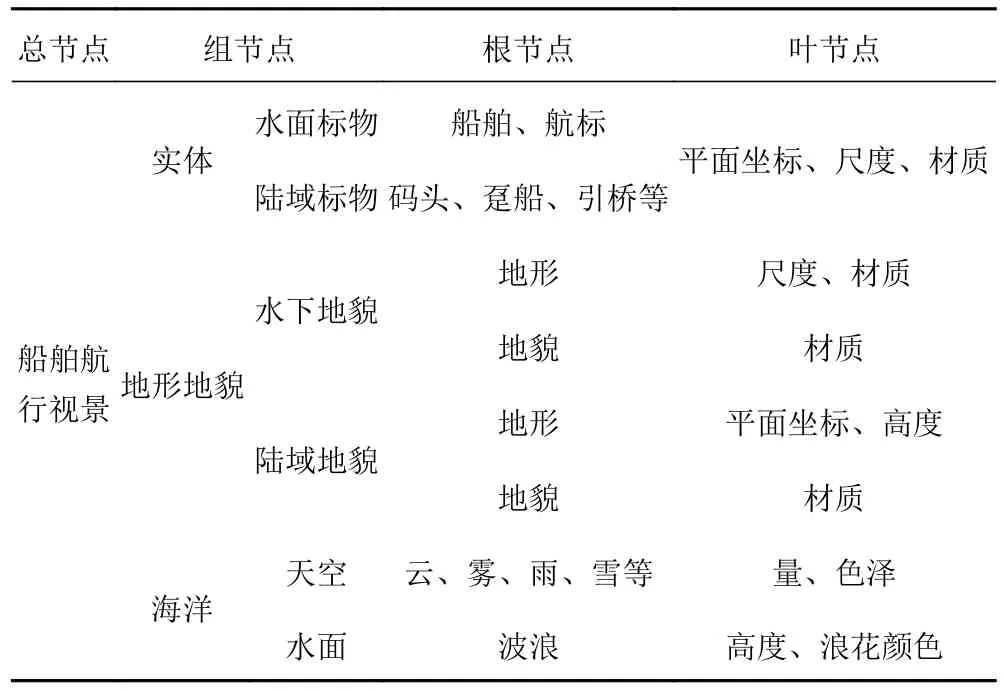
表1 船舶航行视景数字化三维场景节点组织Tab.1 Organization of digital 3D scene nodes for ship navigation scenery
通过节点组织的设计,确定了船舶航行视景数字化三维场景的组成部分,用于构建船舶航行视景的数字化三维模型。
1.2 基于VR 技术的船舶航行视景模型构建
1.2.1 水面与陆域物标三维建模方法
利用VR 技术中的3D MAX 三维建模软件建立水面与陆域物标三维模型,将水面与陆域物标的平面坐标、尺度、材质等参数输入到3D MAX 三维建模软件内,生成水面与陆域物标等高程数据和纹理特征[5]。
1)水面模型参数
平面坐标:北纬30.123 456°,东经120.654 321°。
尺度:1∶5 000。
材质:使用透明材质和反射属性,以模拟真实的水面效果。
2)陆域物标模型参数
平面坐标:北纬30.123 789°,东经120.654 987°。
尺度:1∶2 000。
材质:使用砖墙纹理材质。
对其进行贴图处理后,得到水面与陆域物标三维模型如图1 所示。
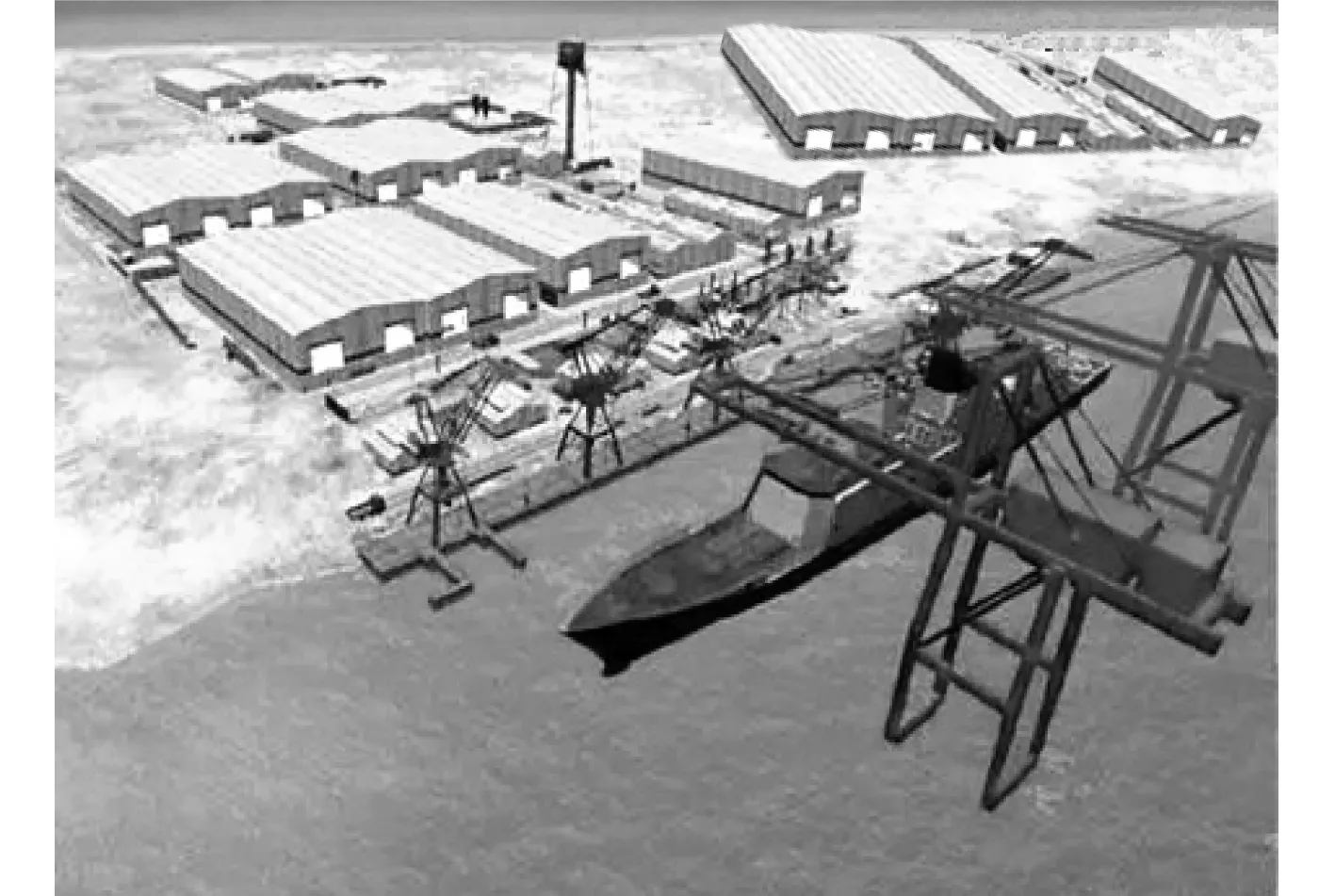
图1 地物标三维模型Fig.1 3D model of landmark
建立船舶龙门吊、港口建筑物等三维模型,从该模型内可清楚为用户呈现地物位置,有效为用户提供船舶航行视景地物信息。
1.2.2 基于Creator 的地形地貌三维建模
按照船舶航行视景仿真需求,使用VR 中Creator 软件建立不同分辨率的三维地形,其构建过程如下:
1)设置层次细节模型参数
采用规则网格建立地形模型,并将层次细节模型数量设置为3。
2)设置投影方式参数
Creator 软件提供5 种投影方式,其中Trapezoidal是方位角映射,映射时地形地貌中心点位置最精准,离中心点越远,则地形地貌越扭曲[6]。
3)地形地貌建模
使用Delaunay 转换算法生成地形地貌模型,该算法可采集海底每个地形的高程点,依据每个地形的高程点,可在Creator 软件内生成地形地貌模型
4)纹理映射处理
地形地貌模型生成完毕后,将海底地形纹理图片导入到Creator 软件内,依据投影方式将纹理图像投射到对应的坐标位置,完成地形地貌三维模型构建,如图2 所示。
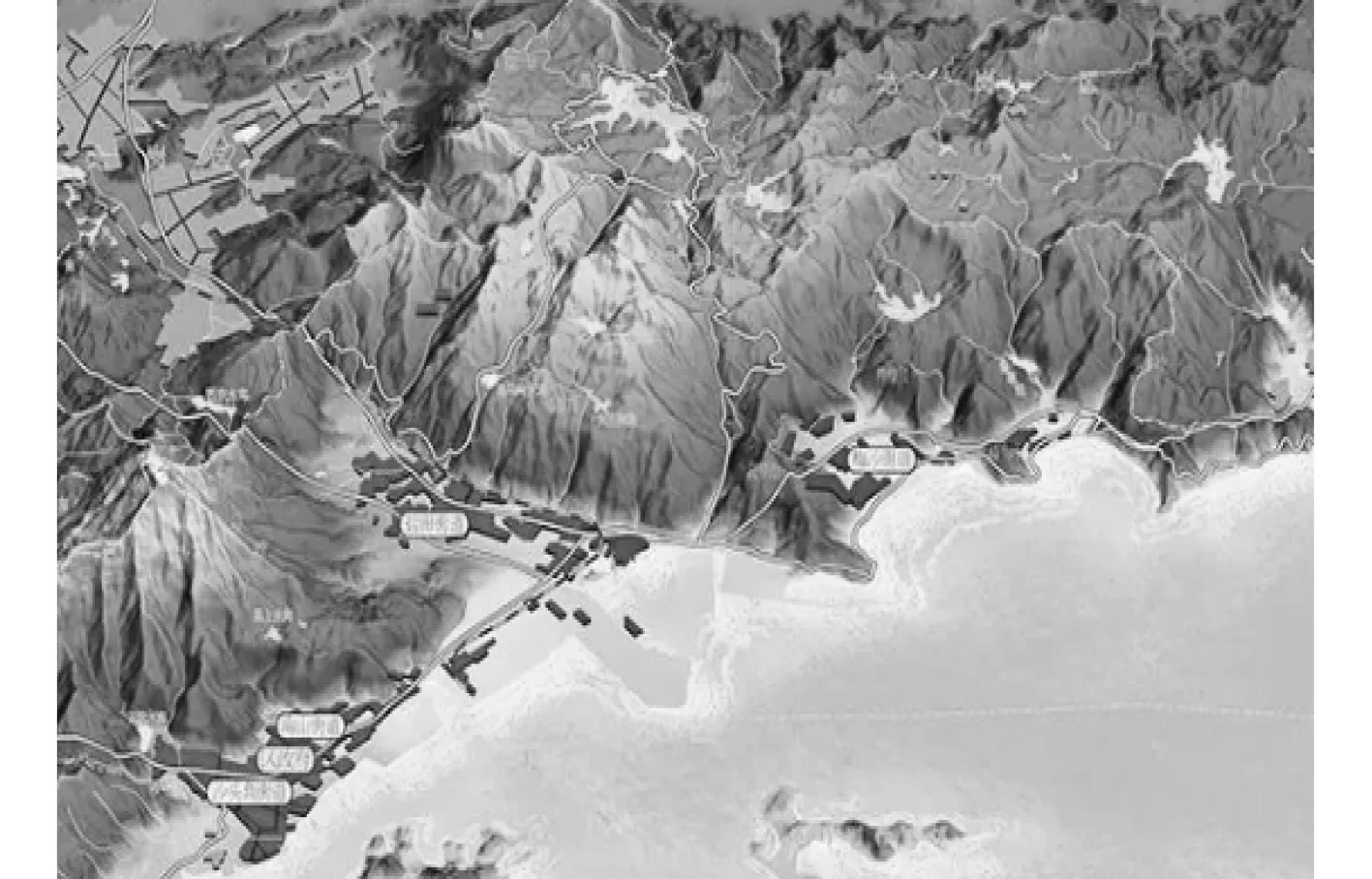
图2 地形地貌三维模型Fig.2 3D model of terrain and landform
1.2.3 船舶虚拟环境建模
船舶虚拟环境建模是船舶航行视景数字化三维建模的关键,使用VR 技术建立船舶虚拟环境模型,其详细过程如下:
1)船舶初始三维模型生成
建立船舶三维模型是得到其航行视景数字化的基础,将现实中的船舶在虚拟的三维数字空间重构,是一个实物虚拟化的过程。在建立船舶三维模型时,需要将海量的船舶参数转换成VR 可用的数据[7],本文使用PDM 技术,将船舶参数从CAD 转化成VR 后,生成船舶初始三维模型。
2)船舶网格模型重建
将初始的船舶三维模型空间分割为10 个正方体[8],使用指示函数判断每个正方体的定点是否位于船舶三维模型空间内部,在正方体内部生成1 000 个等值三角面,对等值三角面进行表面重采样后,生成网格面,完成船舶网格模型重建。
3)纹理映射
令Qi表示船舶三维模型的三角面片,I为输入的船舶实景图像序列,利用能量函数来选择船舶三维模型的最优纹理,表达公式为:
当式(1)数值最小时,其对应的船舶实景图像即为最优纹理贴图图像。
4)船舶虚拟环境生成
将纹理贴图后的船舶数字化三维模型导入到船舶虚拟展示画面中,将船舶模型缩小至1∶50,使船舶数字化三维模型更加接近实际状况,具体船舶虚拟环境模型如图3 所示。
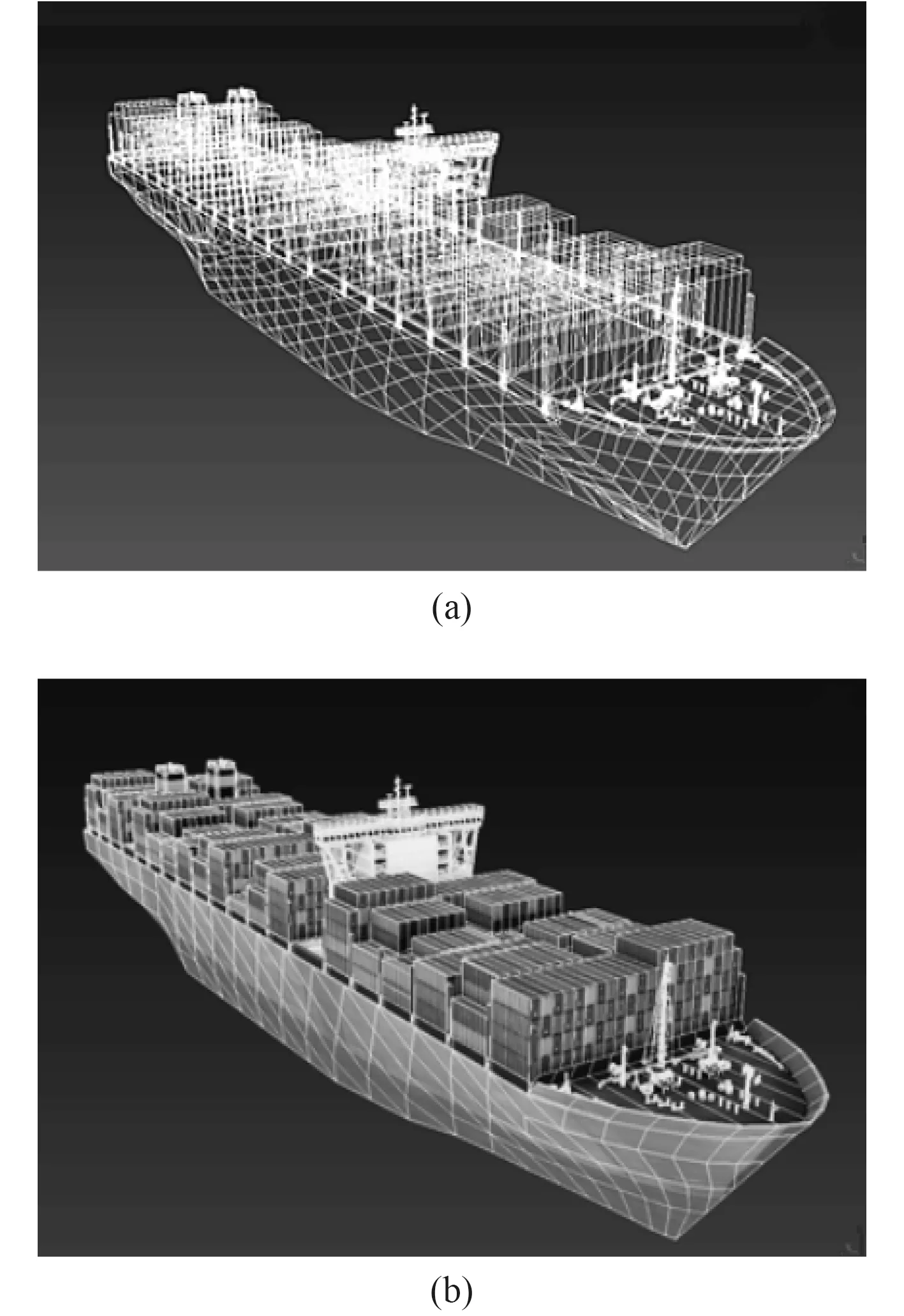
图3 船舶数字化三维模型Fig.3 Digital 3D model of ships
建立船舶网格模型,并对该网格模型进行纹理贴图后,得到船舶数字化三维模型。
1.2.4 船舶运动仿真模型建立
若要获得船舶航行动态三维画面,需要建立船舶空间运动平移方程、空间绕坐标轴运动方程以及船舶三自由度运动非线性方程,利用以上方程得到船舶数字化三维动态数据。
令H表示船体的动量,P表示船舶重心速度,则船舶空间运动平移方程如下:
式中:m表示船舶的质量;R′表示船舶重心坐标位置向量;d表示积分,t表示自变量; ψ表示一定维度的常矩阵; δ表示船舶舵角。
令GΣ表示船舶空间运动回旋向量,其方程如下:
式中,J表示船舶对原点不在重心坐标系的惯量矩阵。
当船舶出现横摇、首摇和横荡情况时,建立其三自由度非线性方程,表达式如下:
式中:Y、N、A分别表示船舶横荡外力矩、首摇外力矩和横摇外力矩;下角标I、H、L、D分别对应流体惯性、粘性、舵和外力干扰。
通过式(2)~式(4)可获得船舶在虚拟环境中运动数字化数值。
2 实验分析
以某水上运输港口作为实验对象,该港口货物吞吐量超过23 000 万吨,属于大型集装箱运输港口,港口有起重机械314 台、门机128 台、龙门吊24 台。通过RIEGL 航空激光雷达收集该港口的高程数据,Canon数字相机收集船舶视景三维实拍图像。使用ArcGIS 处理和分析地形数据。通过AutoCAD 进行船舶的三维建模,采用Blender 对船舶模型进行网格划分、拓扑调整和表面细分等操作。使用Adobe Photoshop 进行纹理调整、修复和映射等操作。通过Unity3D 将地形模型、船舶网格模型和纹理贴图等组合到一起,构建船舶航行视景的数字化三维模型。使用本文方法建立该港口内船舶的航行视景数字化三维模型,分析本文方法实际应用效果。
为了验证本文方法重建船舶网格模型能力,在船体流线上选择10 个测试点,分析本文方法重建船舶网格前后该10 个测试点与实际船舶参数偏差数值,结果如表2 所示。
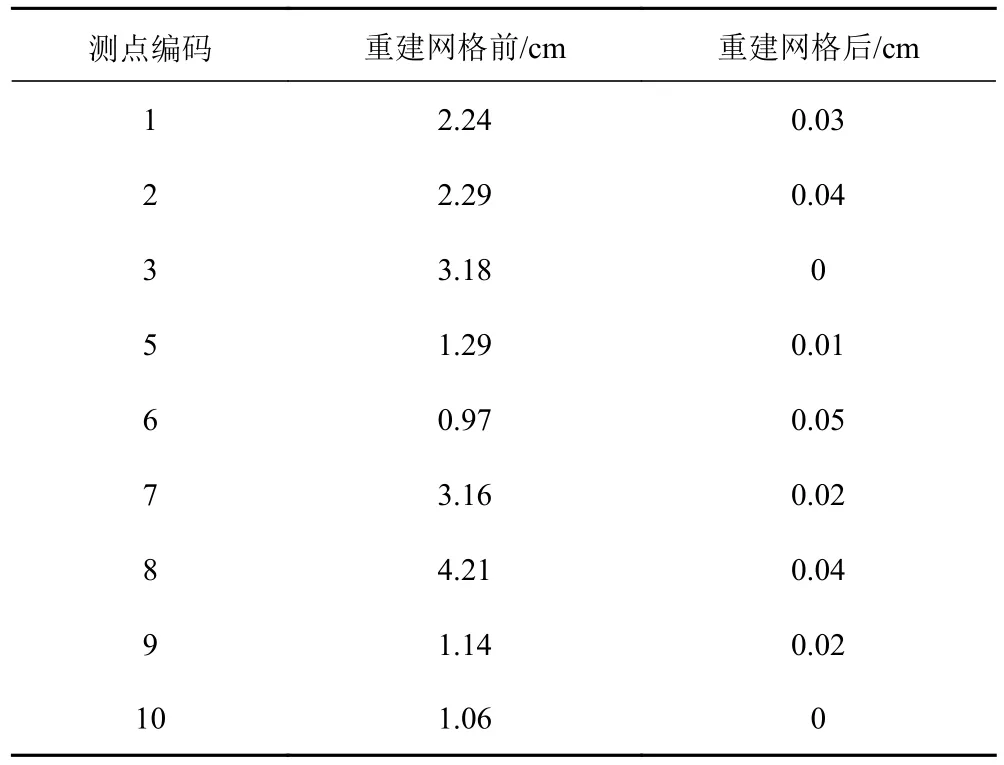
表2 重建船舶网格前后测试点参数偏差数值Tab.2 Parameter deviation value of test point before and after reconstruction of ship grid
分析可知,在船舶网格在重建之前,10 个测点偏差数值位于0.97~4.21 cm,而使用本文方法对船舶网格进行重建后,其最大偏差仅为0.05 cm,最小偏差为0。该结果说明本文方法对船舶网格进行重建后,可有效修复船舶三维模型的偏差,使建立的船舶三维模型更加精准。
使用本文方法建立的船舶数字化三维模型模拟船舶右回旋,验证本文方法对船舶航行视景数字化呈现效果,结果如图4 所示。
分析可知,使用本文方法可有效呈现船舶右回旋时的运行轨迹,为用户呈现船舶右回旋时不同方向上的航迹,为船舶航行提供数字化呈现方式,说明本文方法具备较为显著的应用效果。
3 结 语
本文提出基于VR 技术的船舶航行视景数字化三维建模方法,经过实验验证得出以下结论:
1)使用本文方法重建船舶网格之后,测试点的偏差范围明显缩小,最大偏差仅为0.05 cm,最小偏差甚至为0。说明本文方法能够有效修复船舶三维模型的偏差,提高船舶模型的准确性和精度。
2)本文方法能够呈现船舶航行视景数字化效果,为船舶航行提供了数字化的呈现方式,具有实际应用价值。