基于云计算平台的船舶航行数据实时快速采集系统设计
2023-11-24高丽娟
高丽娟
(郑州工业应用技术学院 软件学院,河南 郑州 451100)
0 引 言
舰船在航行过程中会产生较多的航行实时数据,通过采集该数据,运用大数据挖掘算法可从数据中寻找到异常数据,为舰船航行运行维护和航行控制提供准确的数据支持。但在挖掘和运用船舶航行数据之前需要实时快速采集航行数据[1],为后续异常检测提供实时性较好的数据,也能尽快为用户提供船舶异常航行时数据。因此,如何实时快速采集船舶航行数据是航海领域重点关注的问题之一[2]。目前有很多学者设计舰船航行数据实时快速采集系统,于志强等[3]设计了多通道数据采集系统,该系统通过不同的组网形式,在网络内设置多通道来实现舰船航行数据快速采集。贾世海等[4]设计APV25 数据采集系统,该系统以Qt 框架作为基础,结合APV25 采集卡实现数据的快速采集。虽然上述2 个系统均可实现数据采集,但其采集数据的及时性略差,因此应用效果不佳。云计算平台也被称为云平台,其是集硬件资源和软件资源于一体的服务,具备计算、网络传输和存储等功能。本文以云计算平台为基础,设计基于云计算平台的舰船航行数据实时快速采集系统,提升舰船航行数据的采集能力。
1 船舶航行数据实时快速采集系统
1.1 系统总体结构设计
以云计算平台作为基础,设计船舶航行数据实时快速采集系统总体结构,如图1 所示。船舶航行数据实时快速采集系统由数据源模块、DDN 网络模块、服务模块和应用模块组成。数据源模块通过数据采集装置采集舰船航行数据后,通过接收机和广播信号将数据传输到DNN 网络模块内,该模块通过转换器、路由器、交换机等将航行数据传输到本地网络内,然后发送到服务模块内,服务模块由采集服务和其他服务组成,分别负责执行数据采集、通信、采集任务调度以及数据异常分析、异常告警等功能,然后将相关数据采集、分析等结果发送到应用模块内,该模块通过数据实时显示单元、数据分析结果单元等为用户呈现舰船航行数据实时快速采集结果等。
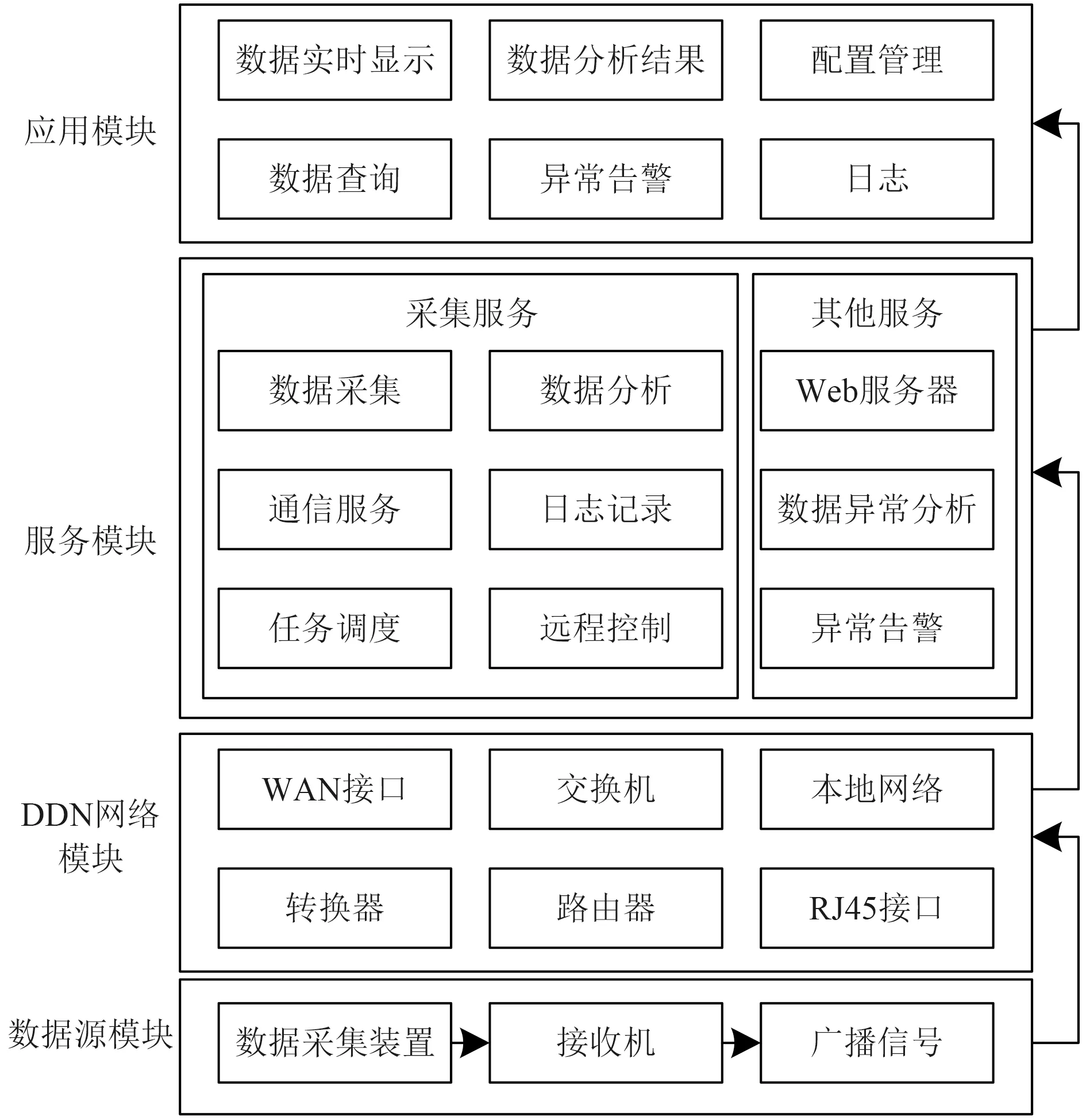
图1 舰船航行数据实时快速采集系统总体结构Fig.1 Overall structure of the real time rapid acquisition system for ship navigation data
1.2 云计算平台网络拓扑设计
云计算平台是船舶航行数据实时快速采集系统架设的基础,设计云计算平台网络拓扑,结构如图2 所示。在云计算平台网络内,数据通过防火墙传输到核心交换区内,在核心交换区可通过管理区域对网络汇聚节点和自主门户进行管理[5],然后通过万兆以太网将数据发送到若干个Web 服务集群内,通过Web 服务集群和FC 存储网络将采集到的船舶航行数据传输到云存储区内,实现船舶航行数据实时快速采集系统的数据传输。
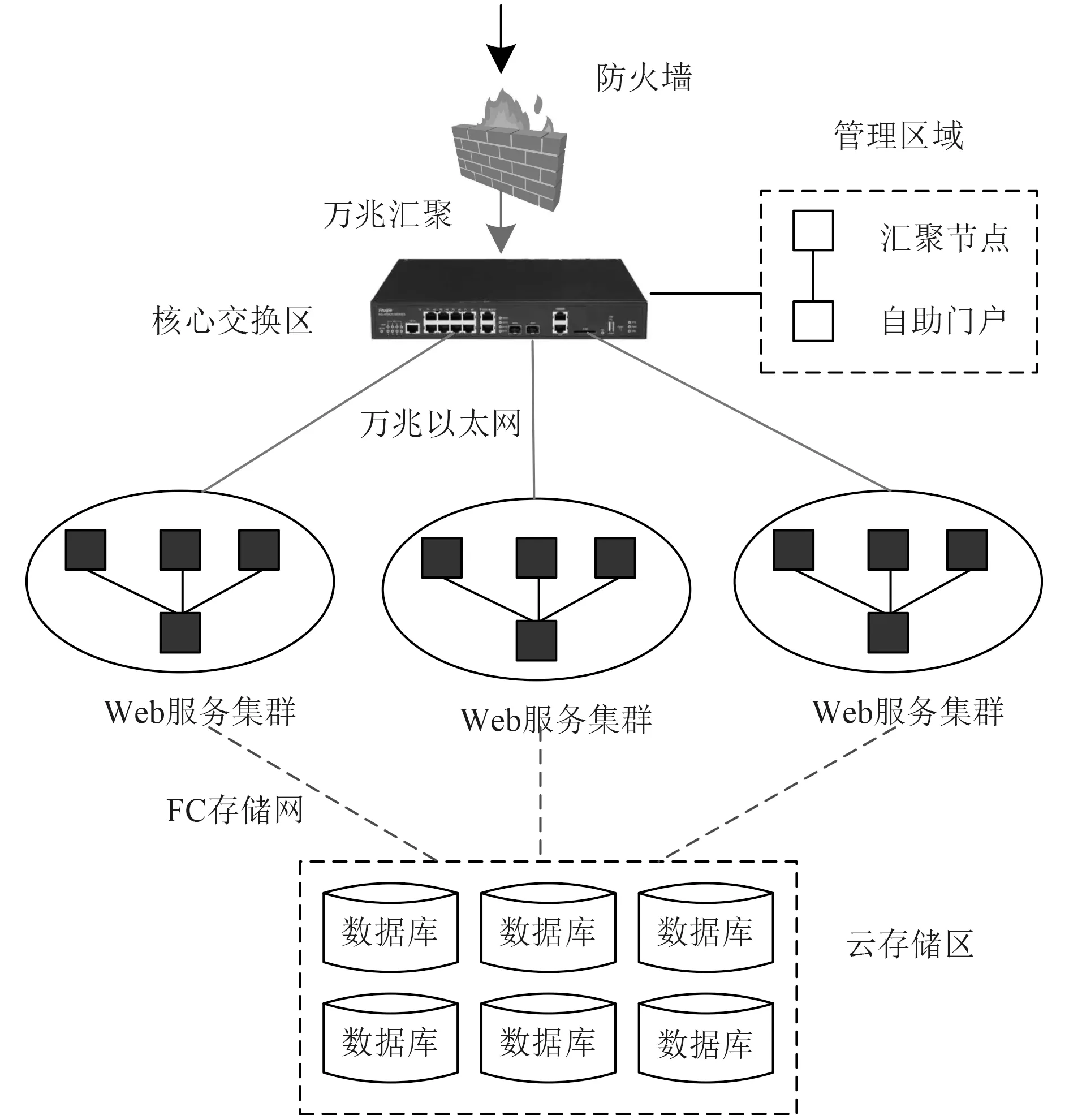
图2 云计算平台网络拓扑Fig.2 Cloud computing platform network topology
1.3 云计算虚拟机集群部署
云计算虚拟机集群负责实时快速传输信息的云计算虚拟部署,其也是负责实现接收用户请求的功能[6],实际云计算虚拟机集群部署,结构如图3 所示。
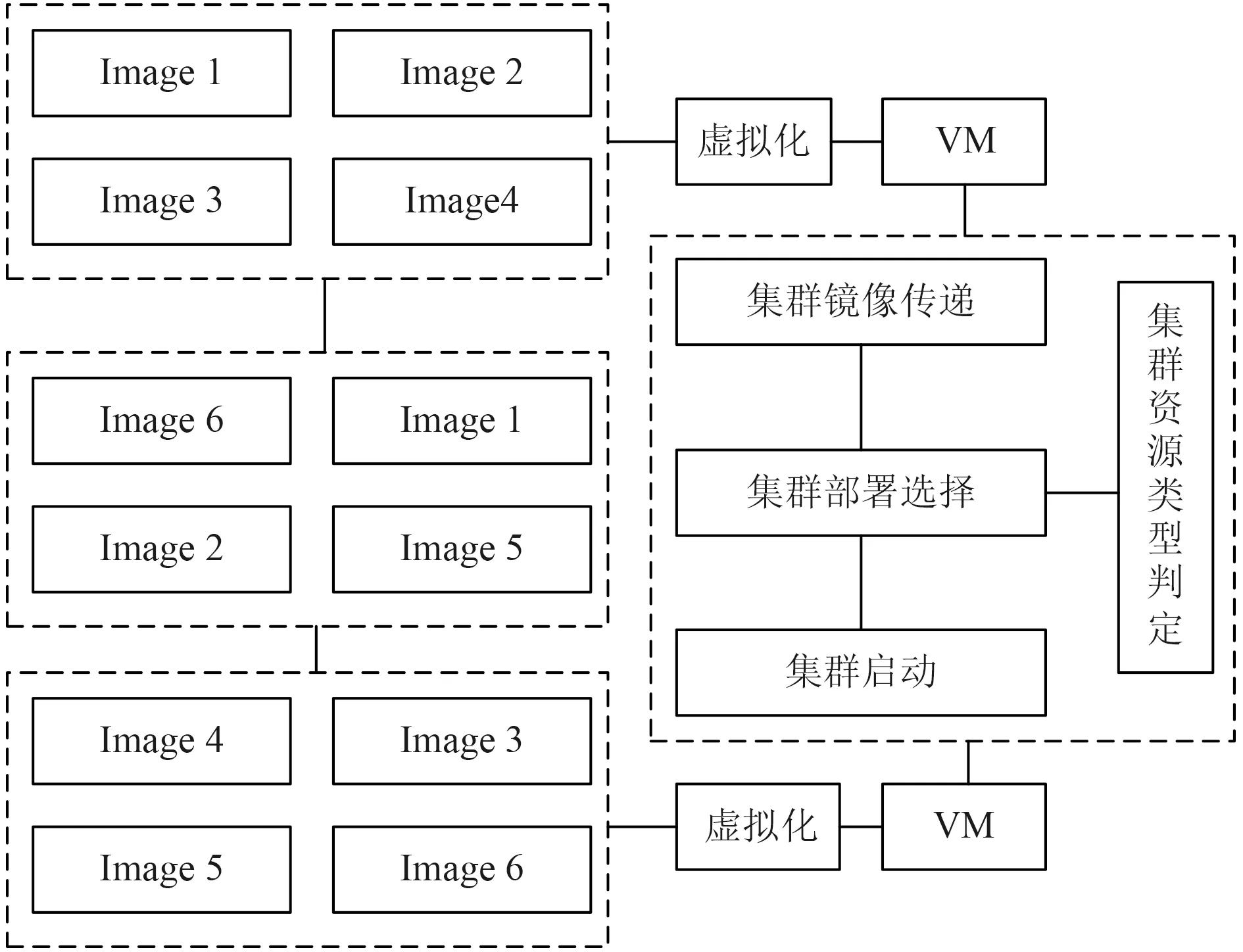
图3 云计算虚拟机集群部署Fig.3 Cloud computing virtual machine cluster deployment
云计算虚拟机集群内共有6 个镜像随机分为3 组互相连接负责生成镜像文件,当用户发送请求时,镜像组生成镜像文件后,云计算虚拟机集群先判定当前资源类型,然后对虚拟机集群进行部署后,同时启动集群并进行镜像传递[7],该过程可使舰船航行数据实时快速采集系统高效运行并综合利用系统的各个资源。
1.4 数据实时采集装置设计
船舶航行数据实时快速采集系统数据源模块利用数据采集装置获取船舶航行数据,设计航行数据实时采集装置,其结构如图4 所示。用户通过终端启动数据采集算法程序后,通过网络接口连接AIS 设备和机舱集控室接口,其中AIS 设备由VHF 通信机、GPS 定位仪、船载显示器以及各种传感器相连[8],连接AIS 设备后,可获得航行船位、航速、航向等航行数据,通过机舱集控室接口可获得当前船舶航行驱动设备温度、转速等航行信息。
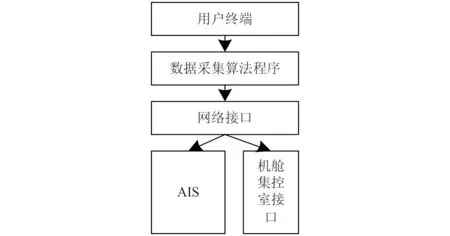
图4 船舶航行数据实时采集装置Fig.4 Real time acquisition device for ship navigation data
1.5 基于线性网络编码的快速数据采集方法
船舶航行数据实时采集装置接收,系统服务模块内采集服务中数据采集单元指令方执行数据采集任务,数据采集单元利用基于线性网络编码的快速数据采集方法向数据实时采集装置发送指令,数据采集方法执行过程如下:
式中,y(v) 为传感器节点v在云计算平台的存储码字。

式中,yi表示采集到第i个节点上的码字。
通过采集船舶航行AIS 和机舱集控室接口每个传感器节点上的码字,组成全局编码向量矩阵,该矩阵即为采集到的船舶航行实时数据。
2 实验结果与分析
以某远洋船舶作为实验对象,该船用于勘探海洋水质和生态环境,因此航行海域水况较为复杂。使用本文系统对该船航行数据进行实时快速采集,分析本文方法实际应用效果。
先验证本文方法采集航行数据的有效性,以该船航行时的偏航角度作为衡量指标,使用本文系统采集时间段内该船偏航角度,设置采集偏差阈值为0.1°,结果如表1 所示。可知,本文系统在采集航行数据时,船舶偏航角度的采集值与实际值之间最小偏差为0°,最大偏差仅为0.02°,该结果远低于预设的偏差阈值。说明本文系统采集船舶航行数据精度较好,采集到的船舶航行数据有效性较强。
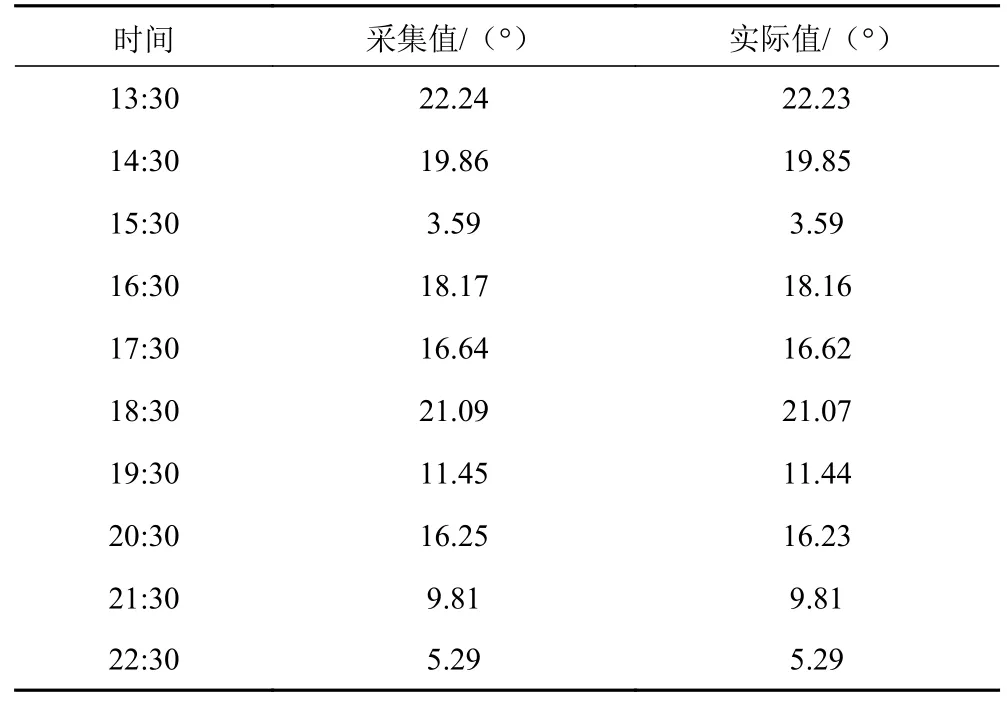
表1 船舶航行数据采集结果Tab.1 Results of ship navigation data collection
验证本文系统的云计算平台集群部署效果,以传输速率作为衡量指标,测试在传输不同类型船舶航行数据时传输速率,也可依据其传输速率分析本文系统采集船舶航行数据的快速效果,测试结果如图5 所示。分析可知,本文系统在传输不同类型船舶航行数据时,其传输速率随着数据量的增加而降低,但降低幅度较为缓慢。在数据量相同时,图像类的船舶航行数据传输速率略低于数值类,二者相差较小。在数据量为55 G 时,图像类和数值类的船舶航行数据传输速率均高于700 Mb/s,该数值说明本文系统传输船舶航行数据速度较快,其部署的云计算集群较为合理,采集船舶航行数据较为快速。验证本文系统采集船舶航行数据的实时性,以采集延迟时间作为衡量指标,以船舶航行速度作为实验对象,验证本文方法采集船舶航行数据的实时性,为使实验结果更加充分,同时使用文献[3]和文献[4]系统展开实验,实验结果如图6 所示。可知,3 种系统在采集船舶航行数据时,其延迟时间随着采集数据量的增加而增加,其中本文系统在采集数据量相同时,其延迟时间最小,说明本文系统采集船舶航行数据时的及时性较好。
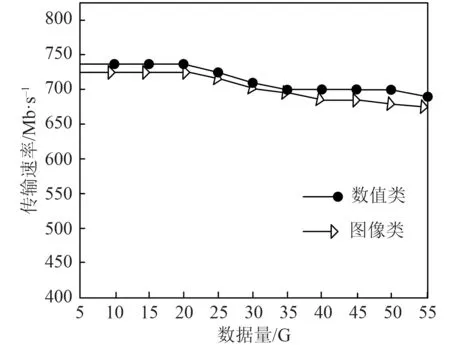
图5 船舶航行数据传输速率Fig.5 Ship navigation data transmission rate
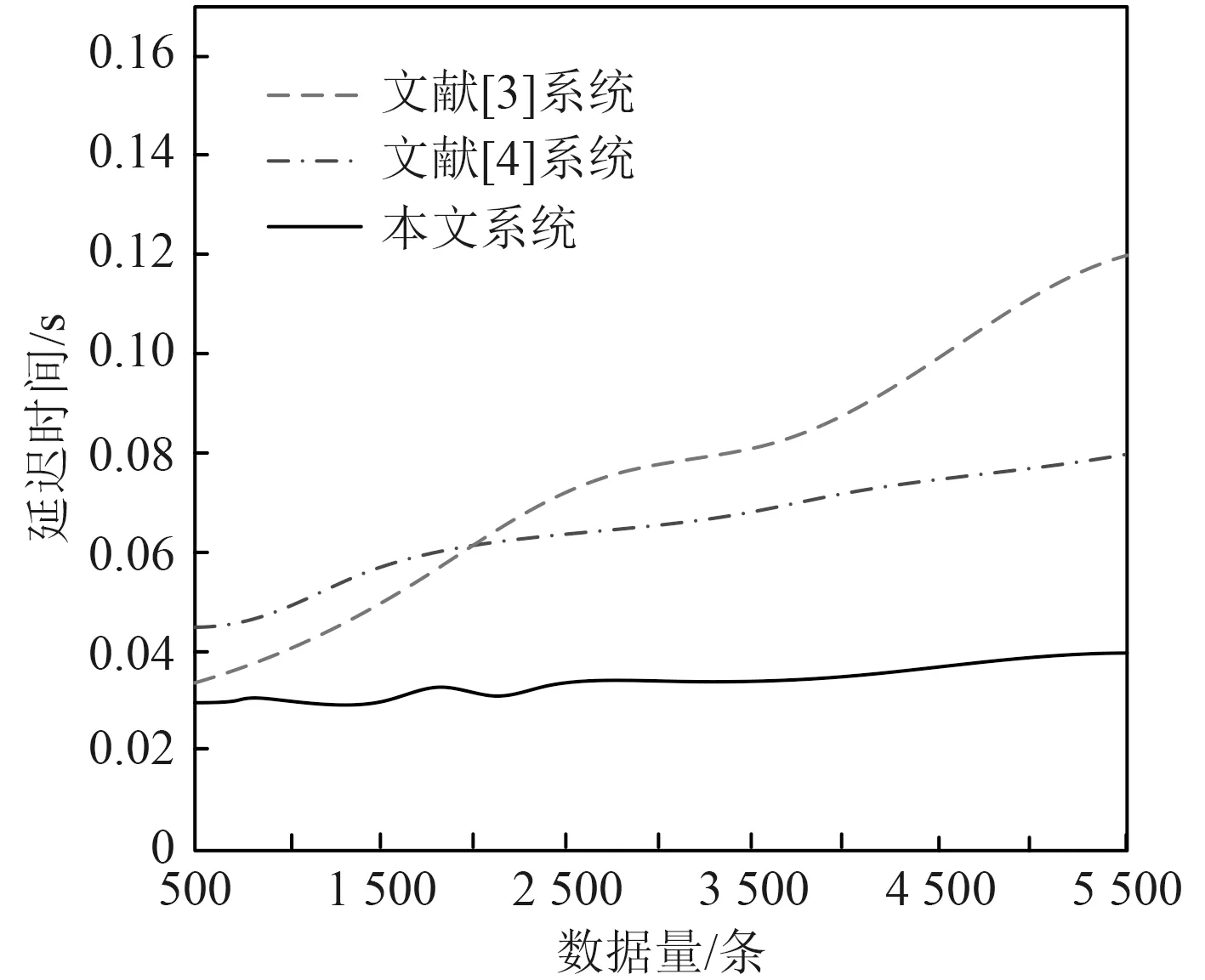
图6 船舶航行数据采集实时性Fig.6 Real time performance of ship navigation data collection
3 结 语
本文设计基于云计算平台的船舶航行数据实时快速采集系统,该系统以云计算平台集群部署和网络拓扑为基础架设,并通过基于线性网络编码的快速数据采集方法控制系统的数据采集装置采集舰船航行数据。经过对本文系统进行多角度验证,得出本文系统采集数据时的及时性和快速性均较好。
