基于Cosserat理论的仿生鱼骨连续型机器人静力学分析
2023-11-23姚建涛朱坤明张轩浩
周 盼 姚建涛,2 朱坤明 张轩浩
(1.燕山大学河北省并联机器人与机电系统实验室, 秦皇岛 066004;2.燕山大学先进锻压成形技术与科学教育部重点实验室, 秦皇岛 066004)
0 引言
农业生产的特点要求农业机器人具有适应非工作环境和抓取非合作目标能力。与传统刚性连杆机器人相比,连续型机器人具有更好的灵活性、柔顺性和人机安全性,在非结构化环境作业和非合作目标操作方面具有显著的性能优势,可应用于农业生产[1-2]、微创手术[3-11]、核反应装置维修[12]、搜索与救援[13-14]和空间探测[15-17]等领域。目前,其结构主要包括单骨干[1,2,6,8-10,18-22]、同心管[7,23]和多骨干形式[5,24-29]。驱动方式主要为气动人工肌肉[14,24,30-33]、绳索驱动[1,2,6,8-10,12,19,20]、杆驱动[3,5,26-28]、电活性聚合物[4,17,34-39]、形状记忆合金[1,21,40-47]和磁驱动[11,48-51]。其中,绳索驱动的单骨干连续型机器人具有结构紧凑、驱动精度高以及负载能力较大等优点,可应用于农业采摘、医疗检查、微创手术以及复杂腔体设备的检测[1,2,8-10]。
单骨干连续型机器人的骨干结构与其建模难度、运动灵巧度、轻量性以及负载能力紧密相关。从中间骨干的结构形式出发,与经典的周向分布一系列圆盘的圆形弹性体的结构形式不同,提出了由多个刚柔软耦合结构的仿生鱼骨单元垂直交叉串联而成的中间骨架构成的连续型机器人[52]。该机器人结构紧凑、质量轻、灵活性高,具有更精确的理论模型以及规则和可控的变形。前期进行了结构设计、样机制作、运动学分析以及应用演示。
基于常曲率假设的建模方法常用于分析连续型机器人没有外部载荷时的变形情况。对于连续型机器人被绳索驱动并且受到外部负载时,应探索可变曲率连续型机器人模型来提高建模精度。目前,基于近似的方法包括分段恒定曲率模型[19,53-55]、Bézier曲线拟合[6]和伪刚体模型[56]等。这些模型使用有限数量的变量近似模拟连续型机器人的形状,以降低形状的维数。另外,GRAVAGNE等[57-59]为受平面内载荷的平面连续机器人的静力学和动力学提供了一个基于能量的综合模型。Cosserat杆理论显示出具有作为描述连续体机器人变形的通用工具的潜力,已用于预测肌腱驱动的连续机器人[60]和预弯曲的同心管[61]中心骨干的形状。本文不仅考虑连续型机器人与绳索连接点处力矩,还考虑连接点力和绳索沿骨干长度对其施加的分布力和分布力矩,以及外部负载和外部力矩,对仿生鱼骨连续型机器人进行静力学分析。建立仿生鱼骨连续型机器人运动模块的Cosserat-rod模型与驱动绳索的Cosserat-string模型,将两种模型进行耦合,考虑刚性鱼骨片、柔性弹性片以及软绳索之间的耦合作用,得到运动模块受到不同绳索驱动力和不同外部载荷时的变形。
1 仿生鱼骨单元的Cosserat-rod模型
为了描述仿生鱼骨连续型机器人在三维空间的变形,首先基于Cosserat理论建立仿生鱼骨单元的运动学以及静力学模型,然后用本构方程将运动学变量与力学参数相关联,进而可得到仿生鱼骨单元在不同驱动力和不同尖端载荷下的弯曲变形。
1.1 仿生鱼骨单元运动学模型
仿生鱼骨单元由外侧布置有十字形薄板的纯软套内嵌弹性片组成[52]。为了描述仿生鱼骨单元的的Cosserat-rod模型,把仿生鱼骨单元看作是均匀的片状结构,如图1所示,其上任意一点的位置可表示为
p(s)=x(s)e1+y(s)e2+z(s)e3
(1)
定位的材料点s其方向由系在其上的正交单位向量d2和d3共同给出。d1=d2d3垂直于横截面,但由于剪切变形的影响d1不一定平行于中心曲线的切线。
引入旋转矩阵R(s)∈SO(3),则仿生鱼骨单元的位姿可以描述为
(2)
以仿生鱼骨单元无限小的微元部段为研究对象,本地坐标平移变化和方位变化描述为
(3)
(4)

全局坐标下速度向量和角速度向量为
v(s)=R(s)v(l)(s)
(5)
u(s)=R(s)u(l)(s)
(6)
由速度和位移关系可得
(7)
(8)
由于角速度可引起方位的改变,可得
(9)
(10)
其中
且定义仿生鱼骨单元变形前的位姿为g*(s),相关运动学参数为R*(s)、v*(s)、u*(s)、v(l)*(s)和u(l)*(s)。
1.2 仿生鱼骨单元静力学模型
选取仿生鱼骨单元点c与点s之间的σ段进行分析,受力示意图如图2所示。n(s)表示仿生鱼骨单元的远端部段(从点s到其尾端)对σ段的力,n(c)表示仿生鱼骨单元的近端部段对σ段的力(从初始端到点c)。同理,存在力矩m(s)和m(c)。f(σ)和l(σ)表示作用在点集σ上的分布力和分布力矩。则力/力矩平衡方程为
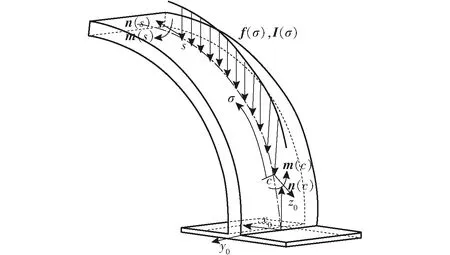
图2 仿生鱼骨单元的受力示意图Fig.2 Force diagram of bioinspired fishbone unit

(11)
(12)
式(11)、(12)两边对s求导得
(13)
(14)
1.3 运动学变量与力学参数映射规律
n(s)=R(s)Kse(s)(v(l)(s)-v(l)(s))
(15)
m(s)=R(s)Kbt(s)(u(l)(s)-u(l)*(s))
(16)
其中
Kse(s)=diag(ke1,ks1,ks2)
Kbt=diag(kt1kb1kb2)ke1=EAT
ks1=ks2=GATkt1=GJ
kb1=EI1kb2=EI2
式中Kse——剪切和拉伸刚度矩阵
Kbt——弯曲和扭转刚度矩阵
1.4 等式构建与变换
将式(15)代入式(13)得
∂s(R(s)Kse(s)(v(l)(s)-v(l)(s)))+f(s)=0
(17)
通过求解得
(18)
将式(8)、(15)、(16)代入式(14)得
∂s(RKbt(u(l)-u(l)*))+
Rv(l)×RKse(v(l)-v(l)*)+I=0
(19)
通过求解得

(20)
2 驱动绳索Cosserat-string模型
驱动绳索Cosserat-string模型的建立基于以下两个假设:假设绳索与机器人上的绳索导向孔之间为无摩擦接触。假设绳索位于绳索导向孔中间位置并保持不变。
作用在仿生鱼骨单元上的分布力f和分布力矩l可分为由真正的外部载荷引起的分布力fa和分布力矩la以及由绳索约束所引起的分布力fb和分布力矩lb,则
f=fa+fb
(21)
l=la+lb
(22)
为了推导fb和lb,首先建立驱动绳索的运动学模型。
2.1 驱动绳索运动学模型
如图3所示,绳索穿过仿生鱼骨单元的十字形薄板上的导线孔,沿着机器人长度方向布置。通过描述导线孔的位置即可定义绳索的路径。可知第i个驱动绳的导向孔在局部坐标系下位置可表示为
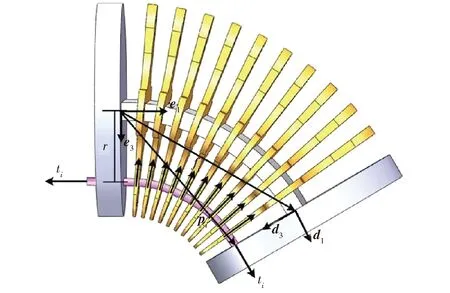
图3 仿生鱼骨单元驱动绳的受力示意图Fig.3 Force diagram of driving cable of bioinspired fishbone unit
(23)
进一步,可得到仿生鱼骨单元未变形时,第i个驱动绳的导向孔在全局坐标系下的位置为
(24)
则仿生鱼骨单元在驱动绳索的作用下产生变形时,第i个驱动绳的导向孔在全局坐标系下的位置为
pi=Rri+p
(25)
2.2 驱动绳索静力学模型
参考式(13),可得驱动绳索的内力导数公式为
(26)
式中fi(s)——鱼骨单元在第i个绳索上的分布力
ni(s)——驱动绳索内力
O——零矩阵
绳索只能承受张力,用ti(s)来表示,其内力方向始终平行于绳子曲线pi(s)处的切线,则得
(27)
其中由于模型建立基于无摩擦接触假设,ti(s)在沿绳方向上大小不变。
将式(27)代入式(26),整理可得作用在绳索上的分布力为
(28)
3 仿生鱼骨单元与驱动绳索耦合模型
3.1 耦合模型隐式表达
根据推导的绳索上的分布力,可得驱动绳索作用在仿生鱼骨单元上的分布力fb和分布力矩Ib。首先根据式(28),可得
(29)
驱动绳索作用在仿生鱼骨单元主干形心处的分布力矩是每个力臂与每个分布力的交叉乘积之和。因此
(30)
如图3所示,在本样机中,仿生鱼骨单元的主干与绳索同步弯曲,pi-p与fi的方向平行,所以Ib=0。
将式(28)代入式(29)可得
(31)
为了用运动单元的运动学变量v(l)、u(l)、R和p来表示分布力fb和分布力矩Ib,将式(28)两边对s进行求导得到
(32)
(33)
将式(32)、(33)代入式(31),然后将结果经过式(21)代入式(18),并将Ib=0经式(22)代入式(20),即可得一组隐式微分方程来表示仿生鱼骨单元与驱动绳索的耦合模型。
3.2 耦合模型显式表达
为了得到仿生鱼骨单元与驱动绳索的耦合模型的显式表达,将式(32)、(33)写成局部坐标下的形式,则得到
(34)
(35)
根据式(31)fb可以表示为
(36)
其中
将式(36)和Ib=0代入式(18)、(20),并对其进行整理得到
(37)
(38)

(39)

(40)
进而仿生鱼骨单元与驱动绳索的耦合模型的显式表达为
(41)
4 运动模块静力学分析
运动模块由两级仿生鱼骨单元垂直交叉串联而成,在布置时第一级仿生鱼骨单元执行左右弯曲以减少由其重量引起的自身结构的变形,对两级仿生鱼骨单元进行分步分析。
4.1 第1级仿生鱼骨单元静力学分析
首先对第1级仿生鱼骨单元进行分析。全局坐标系和局部坐标系的建立如图4所示。基于以上对仿生鱼骨单元的分析,很容易得到
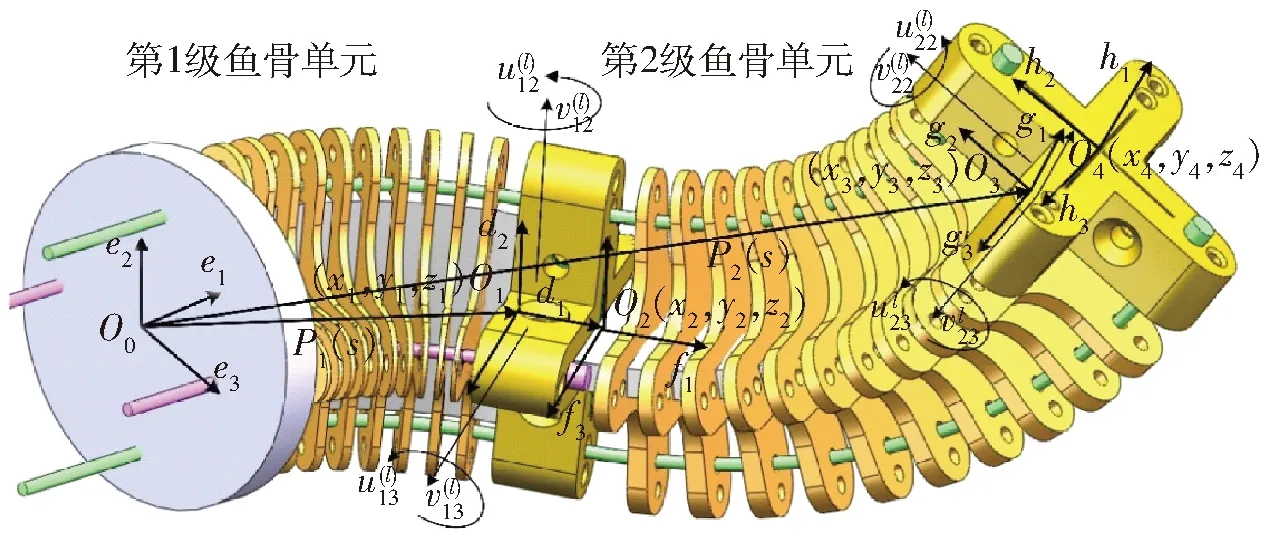
图4 运动模块的空间位姿描述Fig.4 Spatial position and posture of motion module
p1(s)=x1(s)e1+y1(s)e2+z1(s)e3
(42)
(43)
(44)
(45)

第1级弯曲单元尖端的位置O2为
O2=T1(S1)D1
(46)
其中
式中d1——第1级弯曲单元尖端连接件厚度
如图4所示,第1级仿生鱼骨单元静力学分析的边界条件为
(47)
(48)
n1(S1)=N1(S1)
(49)
m1(S1)=M1(S1)
(50)
N1(S1)为第1级仿生鱼骨单元尖端所受的力,包括两项:一项是其末端所受的绳索的拉力,记为F1;另1项为其尖端连接件与第2级仿生鱼骨单元以及其尖端负载的重力和,记为G1。M1(S1)为第1级仿生鱼骨单元的末端所受力矩。
4.2 第2级仿生鱼骨单元静力学分析
对运动模块的第2级仿生鱼骨单元进行分析,可得
p2(s)=x3(s)e1+y3(s)e2+z3(s)e3
(51)
(52)
(53)
(54)
其中

式中t2i——第2级鱼骨单元尖端所受绳子拉力
S2——第2级鱼骨单元弯曲部分的长度
运动模块尖端位置为
O4=T2(S2)D2
(55)
其中
式中d2——第2级弯曲单元尖端连接件厚度
如图4所示,第2级仿生鱼骨单元静力学分析的边界条件为
(56)
R2(0)=R1(S1)
(57)
n2(S2)=N2(S2)
(58)
m2(S2)=M2(S2)
(59)
式中N2(S2)——第2级仿生鱼骨单元尖端所受的力,包括两项,一项是其末端所受的绳索拉力,记为F2;另一项为其尖端连接件与第2级仿生鱼骨单元重力和,记为G2
M2(S2)——第2级鱼骨单元末端所受力矩
5 连续体机器人静力学模型实验验证
如图5a所示,仿生鱼骨单元外侧为布置有十字形薄板的纯软套,内侧嵌有柔性弹性片。内嵌弹性片的材料为65Mn,弹性模量E=210 GPa,泊松比ν=0.3,剪切模量G=E/(1+ν),鱼骨单元弯曲部分的长度S1=S2=50 mm,宽b和厚度h分别为 23 mm 和0.3 mm。横截面AT=bh=6.9 mm2,截面二次轴矩I11=304.175 mm4,I12=0.051 75 mm4,极惯性矩J1=304.226 75 mm4,截面二次轴矩I21=0.051 75 mm4,I22=304.175 mm4,极惯性矩J2=304.226 75 mm4。

图5 仿生鱼骨连续型机器人样机以及操作实验Fig.5 Prototype and operation experiment of bioinspired fishbone continuum robot
实验过程中,将仿生鱼骨单元水平放置,依次在其尖端挂50、150、250、350、450、550 g砝码,其尖端连接件质量为15.46 g,通过两组装有激光定位器的可移动电子尺模块来记录其弯曲形状,如图6所示。与理论模型所得到的弯曲形状进行比较,如图7所示。实验数据沿着整个机器人长度接近模型预测,并且误差沿着机器人长度逐渐增加,因此机器人尖端误差可以用来衡量模型精确度。计算式为
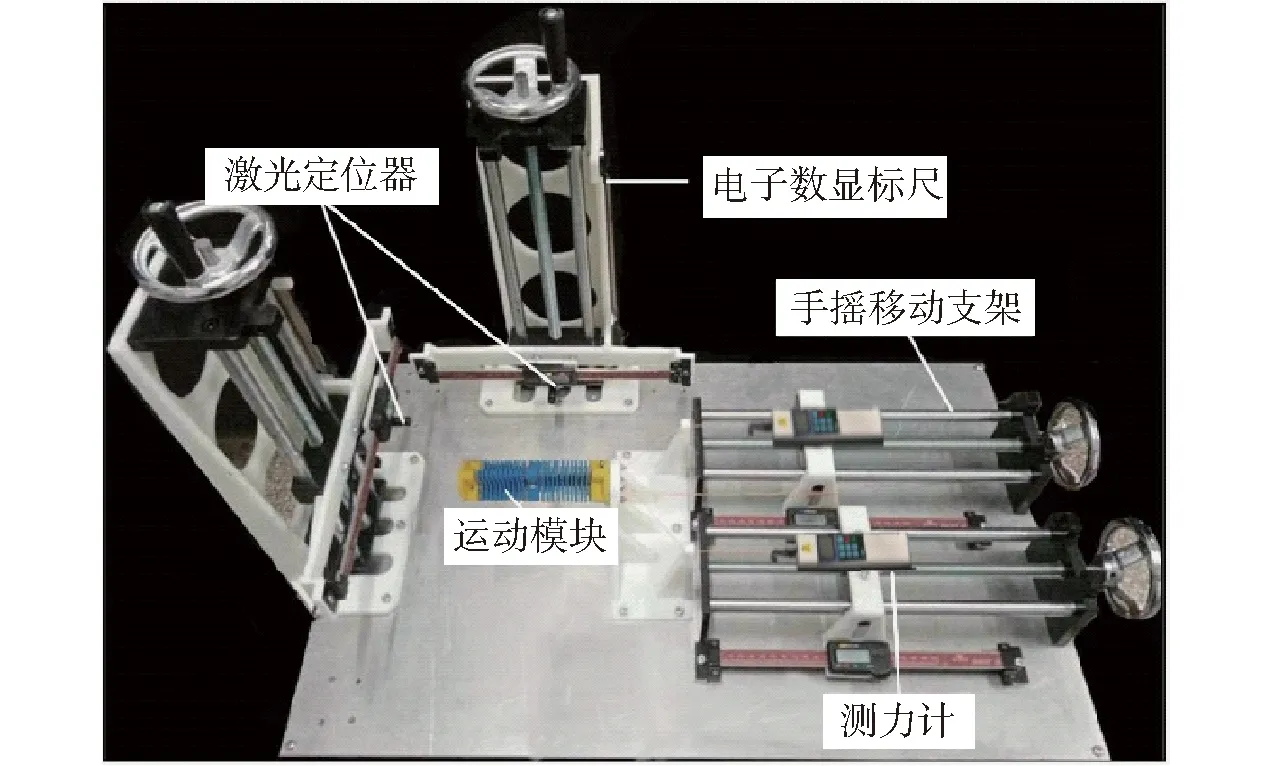
图6 运动模块的测量装置Fig.6 Measuring device of motion module
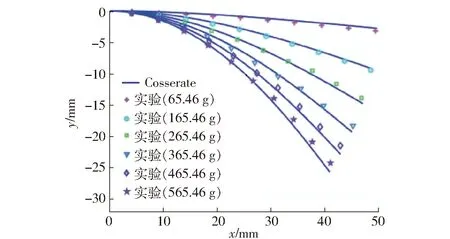
图7 一节仿生鱼骨单元弯曲曲线实验值与理论值对比Fig.7 Experimental and theoretical comparison of bending curves of bioinspired fishbone unit
(60)
式中pt1(s)——第1节仿生鱼骨单元弯曲曲线s处的理论位置坐标
pe1(s)——第1节仿生鱼骨单元弯曲曲线s处的实验位置坐标
通过长度方向的误差对比可得,随着仿生鱼骨单元尖端的负载增加,理论模型结果的误差也随之增加,最大误差为1.07 mm。可得单节仿生鱼骨单元的形状模型精度较高,在尖端负载为565.46 g时,误差为仿生鱼骨单元总长度的2.13%。
在实验过程中,在对第1级仿生鱼骨单元一侧驱动绳索依次施加5、10 N的拉力情况下,对第2级仿生鱼骨单元的一侧驱动绳索依次施加3、6、9 N 的拉力,其尖端连接盘的质量为15.46 g,然后用如图6所示的装置来记录运动模块的弯曲曲线,并与理论模型结果进行对比,如图8所示。可以看出,运动模块的变形曲线理论与实验结果一致性也很高。随着驱动绳索的驱动力的增加,理论值误差也随之增加。第2级仿生鱼骨单元的预测变形误差需大于第1级仿生鱼骨单元的预测变形误差。原因是由于在第2级仿生鱼骨单元的变形分析中,起始坐标为第1级仿生鱼骨单元的尖端预测坐标,与实际位置坐标存在着误差,故导致第2级仿生鱼骨单元的预测变形误差增加。最大误差为1.5 mm,为运动模块总长度的1.2%。
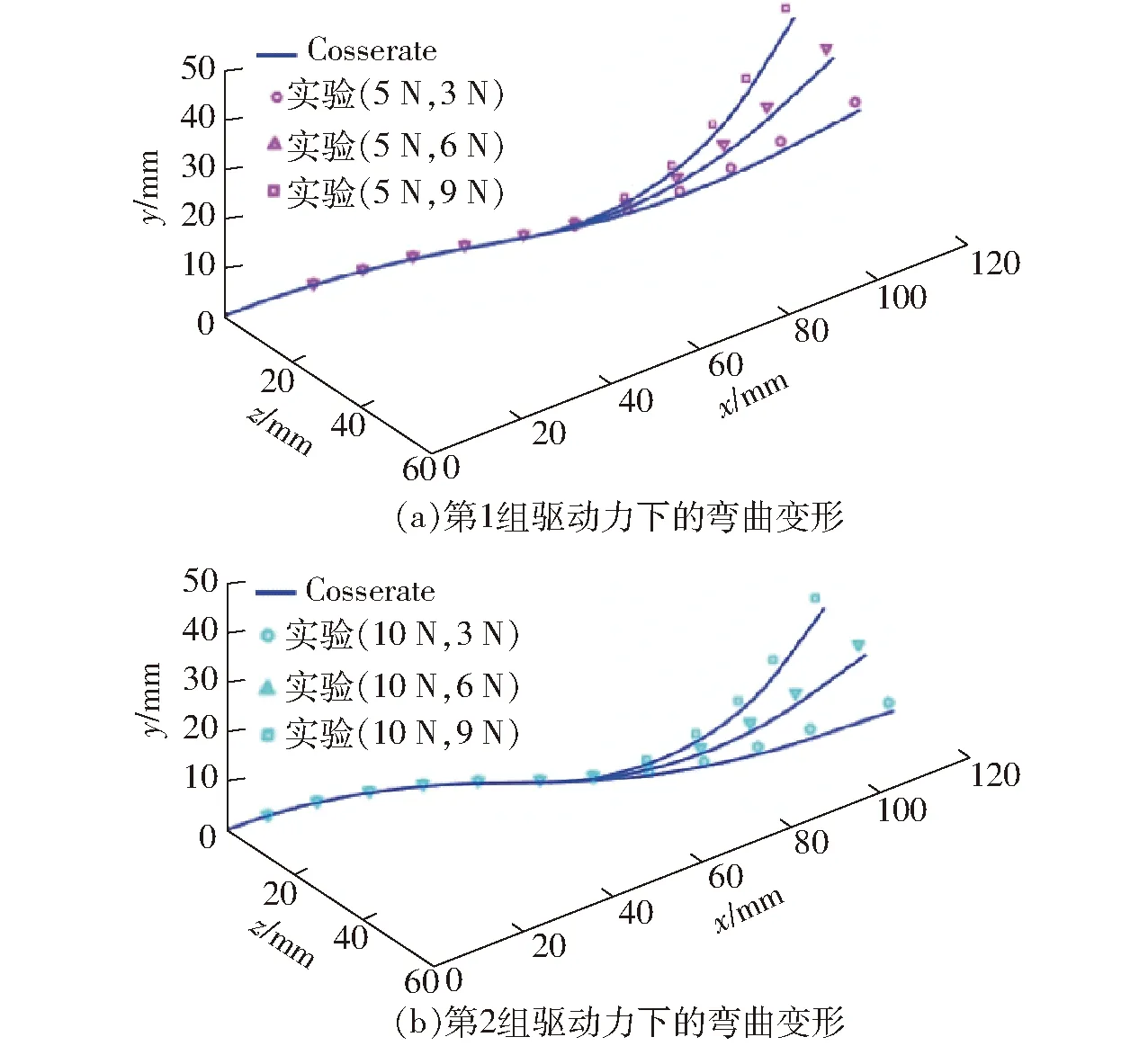
图8 运动模块的弯曲曲线实验值与理论值对比Fig.8 Experimental and theoretical comparison of bending curves of motion module
如图5b、5c所示,仿生鱼骨连续型机器人由控制系统与机械臂组成,而机械臂由2个运动模块垂直交叉串联而成。将机器人安装于移动小车上可扩大其运动空间。该机器人具有良好的灵活性,如 图5d 所示,其可以灵活地完成绕球运动。
6 结束语
基于Cosserat理论对刚柔软耦合结构的仿生鱼骨连续型机器人进行了静力学建模。所建立的理论模型考虑了连续型机器人的刚性鱼骨片、柔性弹性片、与软绳索之间的耦合作用和自身重力,得到了机器人在绳索的拉力,绳索对仿生鱼骨单元骨干作用的分布力和分布力矩,以及外部负载和力矩作用下的变形。并且实验验证了所建立模型的准确性。模型误差随着鱼骨单元变形变大而增加,随着仿生鱼骨单元的节数的增加,模型的预测误差也随之增加。两节垂直交叉布置的鱼骨单元串联而成的运动模块的尖端坐标的预测误差,最大为1.5 mm,为运动模块总长度的1.2%。