基于光照和坡度约束的月球南极着陆选址分析
2023-11-22魏广飞邱昱霄万李明李雄耀
刘 丹,甘 红,魏广飞,2,邱昱霄,万李明,李雄耀
(1.深空探测实验室,合肥 230026;2.中国科学院 比较行星学卓越创新中心,合肥 232001;3.成都理工大学 地球科学学院,成都 610059;4.中国科学院 地球化学研究所月球与行星科学研究中心,贵阳 550081;5.中国科学院大学 资源与环境学院,北京 101408)
引言
20世纪90年代以来,美国发射的“克莱门汀号”(Clementine)、“月球勘探者号”(Lunar Prospector)、“月球勘测轨道器”(Lunar Reconnaissance Orbiter,LRO)、“月球陨坑观测和遥感卫星”(Lunar Crater Observation and Sensing Satellite,LCROSS)等探测器获取的大量数据表明,在月球南极永久阴影区分布有大量的水冰,自此月球南极就成了新一轮探月高潮的热点区域[1]。从科学角度来看,寻找和探讨水冰的来源和赋存状态,并确定其在月球上的形成时间和分布特征,对了解太阳系内部挥发分的储量,以及月球挥发分的演化历史至关重要[2]。从工程探测角度来看,月表水可以作为一种宝贵的原位资源[3],有助于人类在月球的长期探索和停留,例如:可降低未来在月表建立月球基地的成本、作为未来向深空探测的中间补给站[4-5]。
目前,世界各国都将目光瞄向了月球南极,将南极着陆探测视为抢占战略先机。欧洲航天局(European Space Agency,ESA)提出“双轨制”南极探测计划并提出“月球村”概念,即以国际合作的方式在月球南极建立集科学、商用等多种功能为一体的永久太空基地。俄罗斯联邦航天局(Roscosmos)也制定了从“月球25号”(Lunar-25)到“月球27号”(Lunar-27)共3次探月规划,将月球南极作为目标探测区域,并计划在南极建立“月球基地”[6]。“月球25号”于2023年8月10日发射,但在进入环月轨道后于8月19日失控撞月,宣告任务失败。印度于2023年7月14日发射“月船3号”(Chandrayaan-3)探测器,经过多次变轨操作最终于8月23日成功降落在月球南极619 km附近。美国政府于2017年提出“重返月球”后,在2019年正式发布由美国国家航空航天局(National Aeronautics and Space Administration,NASA)主导的“阿尔忒弥斯”(Artemis)计划,目标是于2024年前将宇航员顺利送往月球并安全返回,以及在南极建立常态化驻月机制,为将来的火星载人登陆工程做准备。此外,日本和以色列等国家和组织也在不断推进月球南极探测工作的进度,提出相应的月球南极探测规划。
中国也提出了在月球南极合作共建月球科研站计划,通过建立工作基站开展长期的月球科学研究任务[6]。开展月球南极探测的前提就是着陆区的选址既要在满足工程探测安全,又要最大限度地扩大具有研究价值区域的面积以及探测工作时间的跨度。在月球极区,太阳光近水平方向入射,同低纬度地区相比,其光照条件更为复杂,所面临的工程探测难度也更大[7]。因此准确获取和分析月球极区的光照条件,对探讨月表水及其它挥发分的来源、储量以及工程探测目标区域的选取等具有重要意义。
本文以中国将于2026年发射的“嫦娥七号”(CE-7)探测任务为背景,以“沙克尔顿”(Shackleton)撞击坑作为探测目标,基于高精度的地形数据,通过对坡度、光照条件进行约束,提出并详细探讨着陆区选址的基本方法。在此基础上,通过计算实时的光照条件,获取潜在着陆区的光照时间范围,为着陆选址、巡视器路径实时规划提供参考。
1 极区探测面临的挑战
与月球中低纬度的探测任务相比,极区探测最显著的科学目标就是永久阴影区(Permanently Shadowed Regions,PSR)内的水和其它挥发分[8]。考虑到PSR特殊的光照条件、极低的温度环境和阴影区内未知的地形特征等极端条件[9–11],在目标点的选择和探测方式、搭载的仪器、着陆区的选择等均面临前所未有的挑战[12]。从工程探测的角度出发,通过调研并总结出极区探测面临的挑战可概括为4个。
1)复杂地形
月球极区同样普遍分布着大小不一的撞击坑,且撞击坑内部坡度较为陡峭导致地形起伏较大。太阳光始终接近水平入射,导致光照区、阴影区的分布及其随时间的变化十分复杂[13]。因此,要选择满足地形、光照和科学探测目标等各方均符合约束条件的着陆区就变得非常困难,尤其对探测器的精准着陆带来直接的挑战[14-16]。如果偏离目标着陆点距离过大,可能给探测器着陆带来风险或者着陆后面临没有光照的困难境地。其次,撞击坑内大部分区域没有光照,无法采用光学成像进行导航避障,必须采用激光或者主动照明技术,而撞击坑内部物质对激光和可见光的反照率存在不确定性[5],这给导航仪器的避障能力带来一定的挑战。
2)光照条件及探测器能源供给
基于月球赤道平面与黄道平面的夹角为1.54°的特征,越是靠近极点的位置,地形遮挡越明显。在撞击坑内形成永久阴影区或季节性阴影区[17],在地势高的坑缘和山脊处才能够接收到太阳光照[11]。而连续接收太阳光照的时间长短则直接影响到探测器的太阳能利用和热控系统。在月球南极区域,由于太阳高度角很小且太阳辐照度也不如月球其它地区,所以如何满足所携带的科学载荷需要使用的能量是在南极开展探测工作的一大关键问题。
3)地月之间的测控通信
在月球极区,由于月球自转、天平动以及局部地形影响,对地可见的高度角也往往只有几度,导致月球极区几乎不存在可以持续对地通信的区域[18]。而月球背面更是无法直接进行地–月测控通信。因此,无法持续与地球进行通信也是探测器面临的一大挑战。周文艳等[19]、熊亮等[20]提出了通过发射中继卫星并采用大椭圆倾斜冻结轨道设计的方法来保证地月通讯和数据传输的可靠进行。
4)极端环境下的探测器寿命
未来月球极区探测可能考虑建立月球科研站或月球基地,开展长期持续探测。探测器将面临月球极区极端环境下长期服役、月面自主任务管理和生存管理等诸多挑战,特别是极低温、低重力、月尘等极端环境下高可靠元器件和长寿命执行机构将是影响成败的决定性因素[5]。
本研究以位于南极点附近的Shackleton撞击坑为探测目标,以极区地形(坡度)和光照条件作为工程约束,对CE-7潜在着陆区的选择进行详细分析。而地月间的通信和探测器的寿命则更多地取决于探测方法和技术,本文不在此讨论。
2 数据和方法
目前广泛采用的数字高程模型(Digital Elevation Model,DEM)是LRO搭载的月球轨道激光高度计(Lunar Orbiter Laser Altimeter,LOLA)获取的地形数据[21],LRO是由NASA于2009年7月13日发射目前仍在轨运行的探测器。LOLA作为LRO的7个载荷之一,长达10年的极轨探测获得了大量覆盖极区的地形数据[9]。目前已有覆盖75°S/N以上的DEM对应的分辨率有240 m/pixel、120 m/pixel、60 m/pixel和30 m/pixel,覆盖80°S/N以上的有80 m/pixel、40 m/pixel和20 m/pixel,覆盖85°S/N以上的有40 m/pixel、20 m/pixel和10 m/pixel;覆盖87.5°S/N以上的有20 m/pixel、10 m/pixel和5 m/pixel。这些不同分辨率的DEM为研究极区不同尺度的地形和光照条件提供了基础。甘红等[7]提出了CE-7南极探测的概念任务,并以Shackleton撞击坑为例通过采用20 m/pixel分辨率的DEM数据计算了南极典型区域(图1黑色方框)的光照条件和电场环境。其他学者围绕相似的区域也开展了大量的光照条件计算和着陆区选址分析工作[22-23]。本文采用最大高度角法来计算极区的光照条件[11]。由于计算时间与分辨率的增加呈指数上升关系,导致在目前有限的计算机资源条件下难以完成大范围区域的5 m/pixel和10 m/pixel分辨率的最大高度角数据库计算。在权衡了计算效率和空间分辨率后,选择了15 km × 15 km的研究区进行计算。在此基础上,将光照和坡度作为工程约束条件,通过划分精细网格来统计分析符合约束条件的像元个数和分布特征,从而选择出最佳的潜在着陆区。基于该方法和已经公开发布的60 m/pixel的光照和地形数据,进一步分析了南极88.5°S以上的区域,分析和选出所有符合给定约束条件的潜在着陆区。
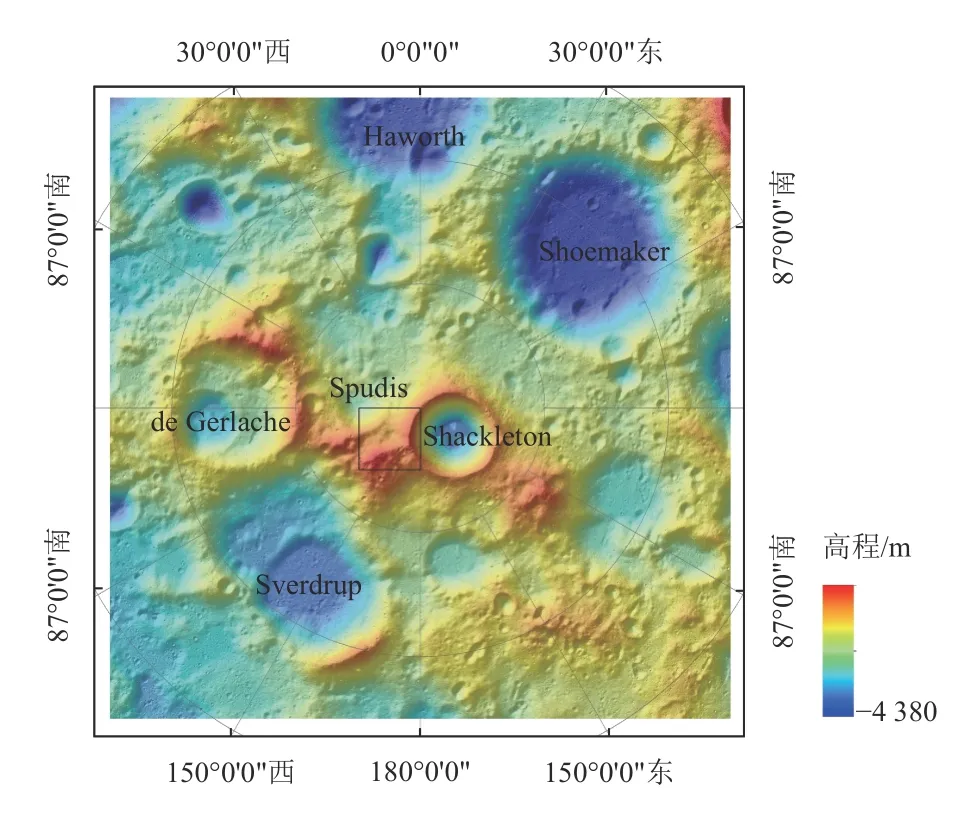
图1 月球南极(>87.5°)地形Fig.1 Topography of lunar south polar region (>87.5°)
3 结 果
3.1 坡度和光照率对着陆区选择的约束
基于空间分辨率为20 m/pixel的DEM数据,本文首先计算了研究区的坡度,如图2所示。坡度范围大致为0°~45°,平均为17.4°±7.8°,其中 ≤25°的像元个数占比为89.8%。从工程探测的角度来说,坡度不仅影响到着陆的安全性,还影响到着陆后巡视器的可达区域范围。图3分别给出了坡度 ≤5°、 ≤15°和 ≤25°时的分布。可以看出随着坡度的增加,可选区域(蓝色区域)的面积也在不断增加,从坡度 ≤5°的19.989 6 km2到坡度 ≤15°的129.987 6 km2,再到坡度 ≤25°的200.868 0 km2。从空间分布特征来看,坡度 ≤5°的坡度主要分布在Shackleton撞击坑的坑缘、与de Gerlache撞击坑之间的山脊西侧区域,以及“斯普蒂斯”(Spudis)撞击坑坑缘外侧;坡度 ≤15°的地形沿着山脊和坑缘向外延伸;坡度≤25°的地形基本上覆盖了除Shackleton撞击坑坑壁的所有区域。从着陆器和巡视器的安全角度来看,将安全的坡度限制在15°以下。
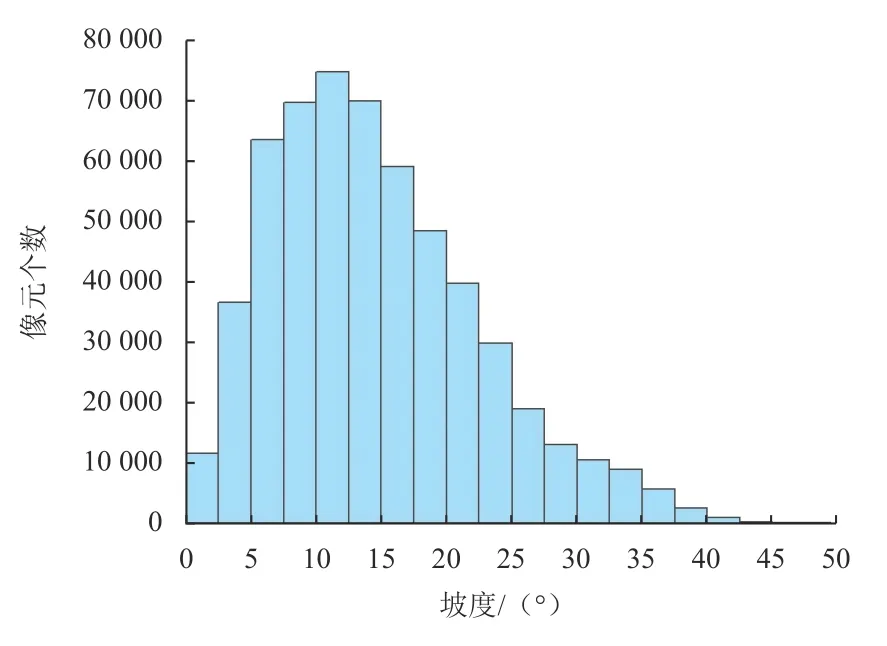
图2 研究区内坡度直方图Fig.2 Histogram of slopes within the study area
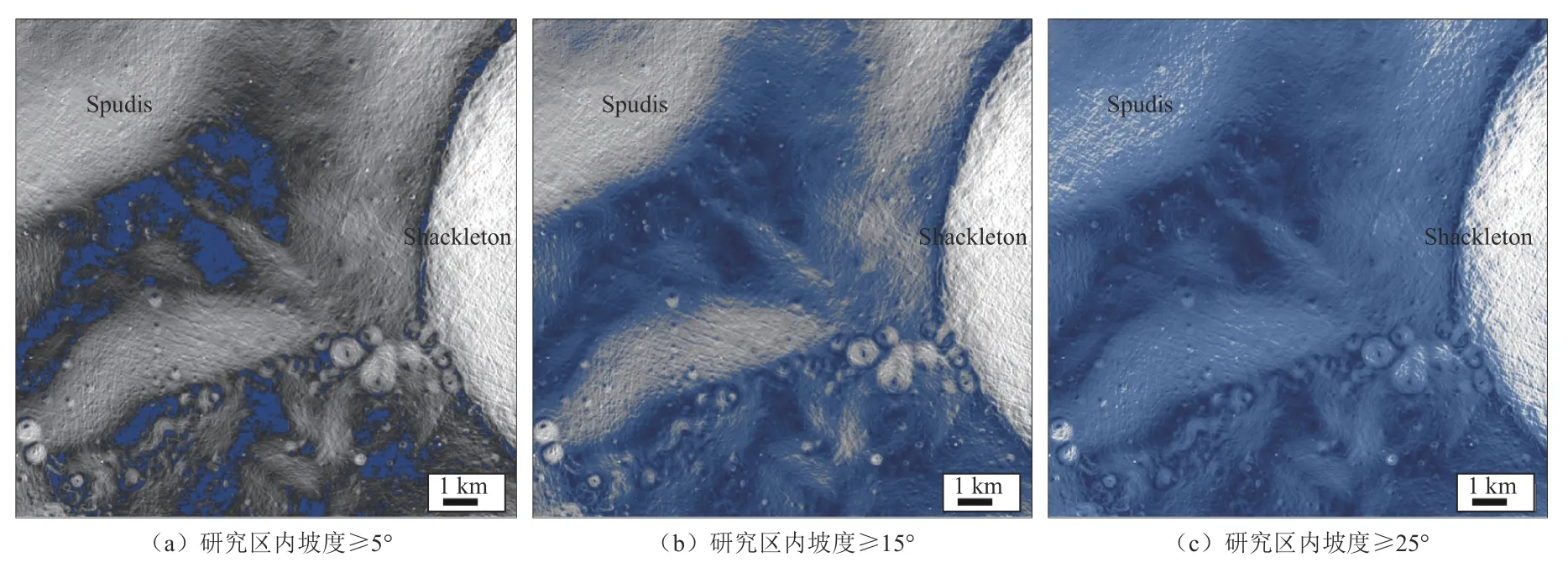
图3 研究区不同范围的坡度分布(蓝点)Fig.3 Distribution of different ranges of slopes (blue dots) within the study area

图5 研究区不同光照率约束下的可选区域分布Fig.5 Distribution of illumination rate greater than 50% ,60% and 70%
为了进一步同时考虑坡度和光照率对着陆选址的约束,结合图3的坡度特征和图5的光照率特征,分别计算了在坡度 ≤5°、 ≤15°、 ≤25°条件下研究区内光照率从50%~100%的可选总面积的变化(图6)。可以看出,当光照率低于70%时,坡度 ≤15°与 ≤25°的可选面积差别不大,但与坡度 ≤5°的可选面积差别十分显著,说明符合相应光照条件的坡度主要分布在15°以下,这对工程选址是非常有利的。而在光照率高于70%时,3种坡度条件下的可选面积很小且变化趋势基本一致,说明光照条件优异的位置地形都比较平坦(整体 ≤5°),这既能满足工程探测安全着陆的要求还满足对太阳能资源的充分利用。接下来,将坡度≤15°作为安全着陆和巡视器移动的上限,探讨可选区域的分布及面积随光照率约束的变化。如图7(a)所示,光照率 ≥50%时的可选区域大部分位于Shackleton坑缘以及山脊及其西侧,总面积为3.768 8 km2;当光照率 ≥60%时,可选面积缩小到0.516 8 km2,呈间段性分布于坑缘及山脊处〔图7(b)〕;当光照率 ≥70%时可选区域呈零散点状分布〔图7(c)〕,可选面积仅为0.130 0 km2。从工程探测的角度考虑,可选面积越小对着陆的精度要求越高。综上分析,将坡度 ≤15°且光照率 ≥60%的区域〔图7(b)〕作为着陆选址和路径规划的基本工程约束条件。

图6 不同坡度条件下光照面积随光照率的变化Fig.6 The total illuminated area varies as a function of the illumination rate
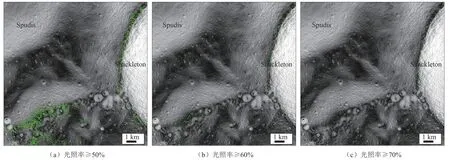
图7 坡度 ≤15°约束条件下的区域内光照率分布(绿色区域)Fig.7 Distribution of slope constrained ( ≤15°) illumination rate (green area) greater than 50%,60% ,and 70%
3.2 潜在着陆区的选择
上文给出了坡度和光照率对着陆区选择的约束,发现光照率大的区域主要分布在坑缘和山脊位置,下面对潜在着陆区的分布特征进行量化对比并进一步确定最佳着陆区位置。首先将研究区(15 km × 15 km)按照1 km间距划分为15 × 15个网格单元,然后分别统计每个网格单元内符合工程约束(坡度 ≤15°,光照率≥60%)的像元个数,再根据像元个数及其空间分布特征(聚集还是离散)选择出最佳着陆区域。需要注意的是,这里选择的1 km × 1 km网格单元包含2 500个像元(20 m/pixel分辨率),仅作为研究区定量化对比的一个基准。若考虑更精细的网格,如200 m × 200 m,其包含100个像元,同样可以对可选区域的面积进行定量化对比。为了简化对比且使得划分方案更加清晰明了,选取前者网格划分方案。此外,在对比网格内的像元个数时,同时会考虑网格内像元分布特征以及与相邻网格内像元间的空间分布关系(连续还是分散),作为判断和筛选依据。
图8展示了研究区内每个网格符合工程约束的像元个数分布。可以看到,沿着坑缘和山脊分布的像元(网格内绿点)表现出显著的差异。对于Shackleton坑缘来说,在(X=-3 km,Y=-7 km)位置的网格像元个数达到最大的86个,面积为34 400 m2。在网格单元(X=-1 km,Y=-1 km)、(X=-2 km,Y=-2 km)和(X=-3 km,Y=-9 km)位置,像元个数达到了49个、52个和44个,相应的面积为19 600 m2、20 800 m2和17 600 m2,但是像元分布比较分散且不连续。而网格单元(X=-2 km,Y=-4 km)虽然仅有23个像元,面积为9 200 m2,但其与之相邻的网格内的像元可以保持连续分布。对于山脊来说,在网格单元(X=-12 km,Y=-13 km)位置分布着最高的145个像元,面积为58 000 m2,且像元呈部分分散整体连续的分布特征。与之相邻的网格(X=-11 km,Y=-12 km)和(X=-12 km,Y=-12 km)像元个数分别为108和28个,相应的面积为43 200 m2和11 200 m2。虽然二者与最高像元数差别很大,但与其保持着像元连续性分布,这显然对着陆选址和月面巡视探测是有利的。其它邻近的网格像元数量比较低且分散,一方面不利于着陆区选择,另一方面不利于着陆后的广域巡视探测。
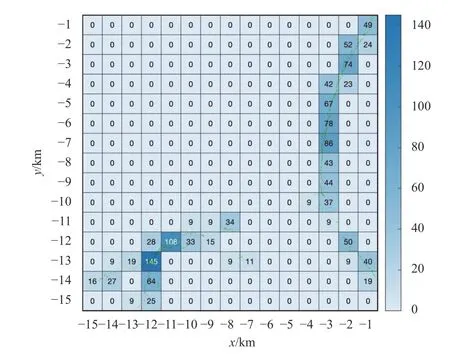
图8 研究区内符合工程约束(坡度 ≤15°、光照率 ≥60%)的像元个数及分布(绿点)Fig.8 Number of data points (green dots) constrained by the slope( ≤15°) and illumination rate ( ≥60%) within the study area
根据以上分析,选出了研究区内符合坡度和光照约束的潜在着陆区,如图9所示。潜在着陆区1(黄色框)位于Shackleton坑缘,总面积为165 200 m2,整体上呈状连续分布。在此范围内,巡视器可以开展广域的月面巡视和调查。红色框包围的区域为潜在着陆区2,位于山脊区域,总面积为112 400 m2。相比前者,着陆区2面积要少52 800 m2,但呈部分聚集整体连续的特征,这对着陆器的降落安全是非常有利的。

图9 基于网格划分选出的潜在着陆区分布Fig.9 Distribution of potential landing area based on mapped meshing.
4 讨论
4.1 潜在着陆区的实时光照分布
针对本研究区,选出了以Shackleton撞击坑为探测目标的潜在着陆区1和2。对于具体的探测任务例如CE-7,除了要选择出潜在着陆区外,还需要对着陆区的光照时间进行详细划分,以便为着陆时间选择、巡视器路径规划、光照利用方案等提供参考依据。因此,进一步通过计算覆盖研究区一定时间范围内的实时光照条件,从而对潜在着陆区的光照时间范围进行筛选和分析。具体步骤如下。
1)以1 h为步长计算研究区2026年1月1日0点—2026年12月31日23点时间范围内每个像元i的太阳可视系数fi和日–月距离Ri(单位AU)。太阳可视系数指的是,当把太阳当作面光源时,站在月球任意位置看到的太阳面积占圆盘面积的比例。当太阳在地平线以下或被完全遮挡时,fi=0;当太阳在地平线以上且完全可见时,fi=1;当仅能看见部分太阳圆面时,0 <fi<1。
2)计算研究区内每个像元的当地坡度和方位角。

图10展示了潜在着陆区1(黄色框)在2026年1月份的光照特征,其中绿色点覆盖的位置与图9中绿色点位置完全一样,均为符合本研究约束条件的着陆点。具体来看,在1月2日12时〔图10(a)〕着陆区部分位置开始出现光照,在1月9日23时光照基本覆盖到区域全部〔图10(b)〕,到1月13日11时阴影刚好覆盖全部着陆点〔图10(c)〕。该过程潜在着陆区1的持续光照时间约为11 d。在该时间范围内,对开展探测器着陆、巡视器的广域探测任务非常有利。经过约4.5 d的阴影遮挡,在1月17日23 时该着陆区再一次受到光照〔图10(d)〕,同样经历光照全覆盖〔图10(e)〕和最后的消失〔图10(f)〕过程,总共持续的时间约为8.5 d。值得一提的是,如果探测器的能源能够保证载荷工作在4.5 d以上,那么该阴影遮挡时间即可忽略,连续光照时间则达到19.5 d。这对延长设备工作时间和提高月面探测效率具有重要意义。
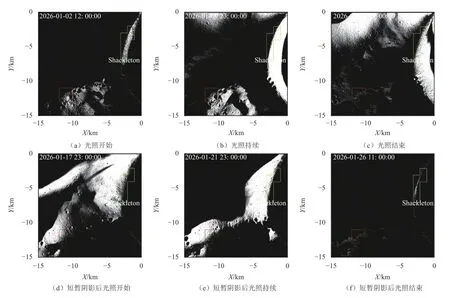
图10 2026年1月潜在着陆区1(黄色框区域)的持续光照分布Fig.10 Distribution of continue illumination at potential landing area 1 (yellow box) in January,2026
与潜在着陆区1相似,潜在着陆区2在1月份也表现出相似的光照特征,如图11(红色框)所示。在1月2日0时着陆区开始出现光照〔图11(a)〕,在1月5日23时全部区域受到光照〔图11(b)〕,到1月10日23时光照消失〔图11(c)〕,共持续约9 d。经过约4 d的阴影遮挡,在1月14日23时该着陆区再一次出现光照〔图11(d)〕,在1月19日23时全区域出现光照〔图1 1(e)〕,直到1月2 5日1 1 时光照消失〔图11(f)〕,该过程持续了10.5 d。同样地,如果探测器的能源可以维持载荷正常运行4 d以上,潜在着陆区2可以连续开展23.5 d的月面探测任务,其中包括19.5 d的光照时间。从这两个区域在1月份的光照时间分布来看,二者的总光照时长基本一致,而且有较长的重叠日期。说明从光照条件的角度来看,这两个区域都是十分理想的潜在着陆区。
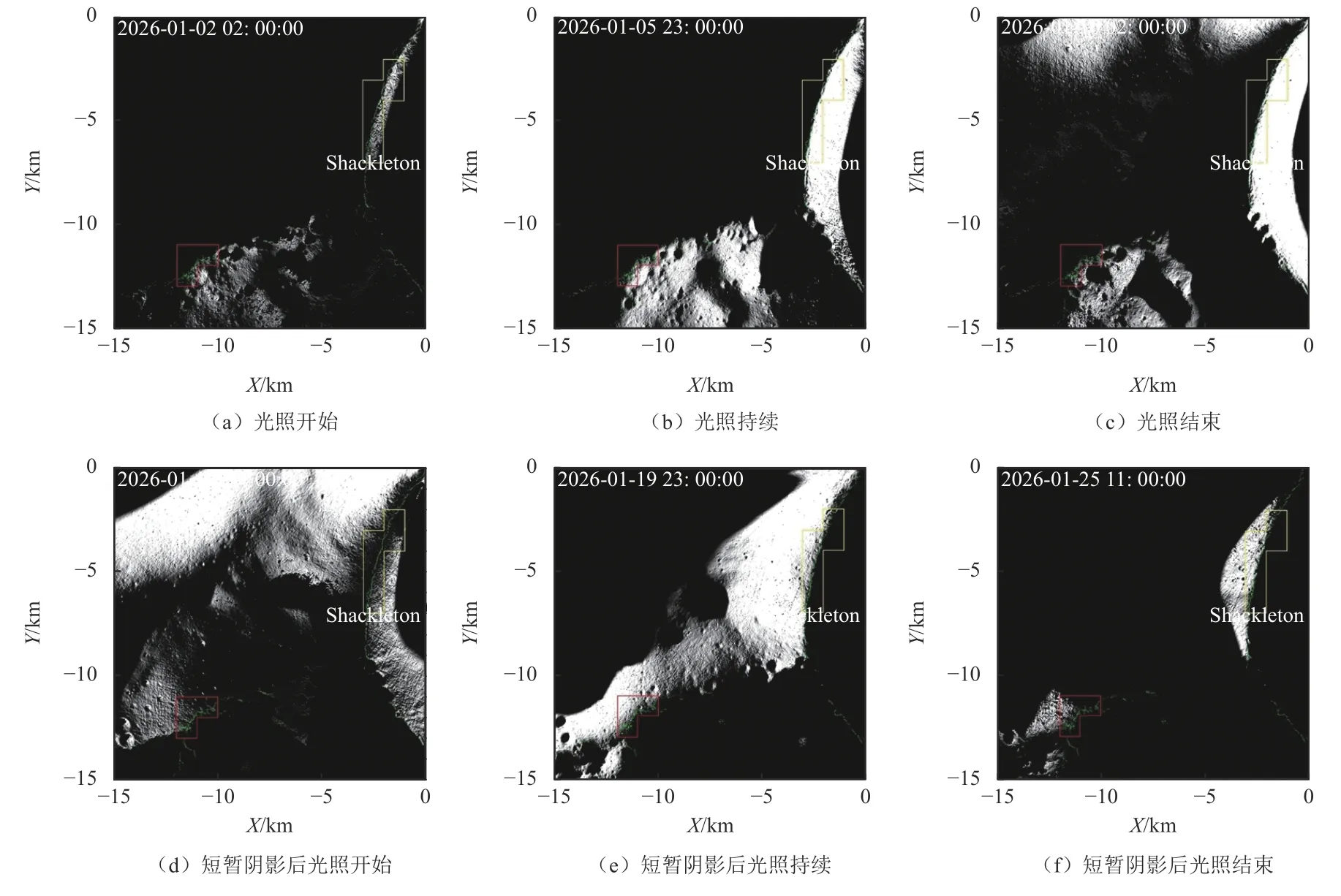
图11 2026年1月潜在着陆区2(红色框区域)的持续光照分布Fig.11 Distribution of continue illumination at potential landing area 2 (red box) in January,2026
基于以上筛选原则,分析并推测了这两个区域2026全年的连续光照时间,如表1所示。潜在着陆区1的连续光照时间区间为7.5~12 d,最大值主要分布在10月25日0时—11月5日23时和11月23日12时—12月5日11时这两个时间段。潜在着陆区2的连续光照时间区间为7.5~10.5 d,最大值主要分布在1月14日23 时—1月25日11时。显然,潜在着陆区1的连续光照时间要普遍多于潜在着陆区2,从太阳能利用和探测效率的角度来说,前者更适合作为着陆区,而且距离Shackleton坑底更近,对实现科学目标探测更加有利。
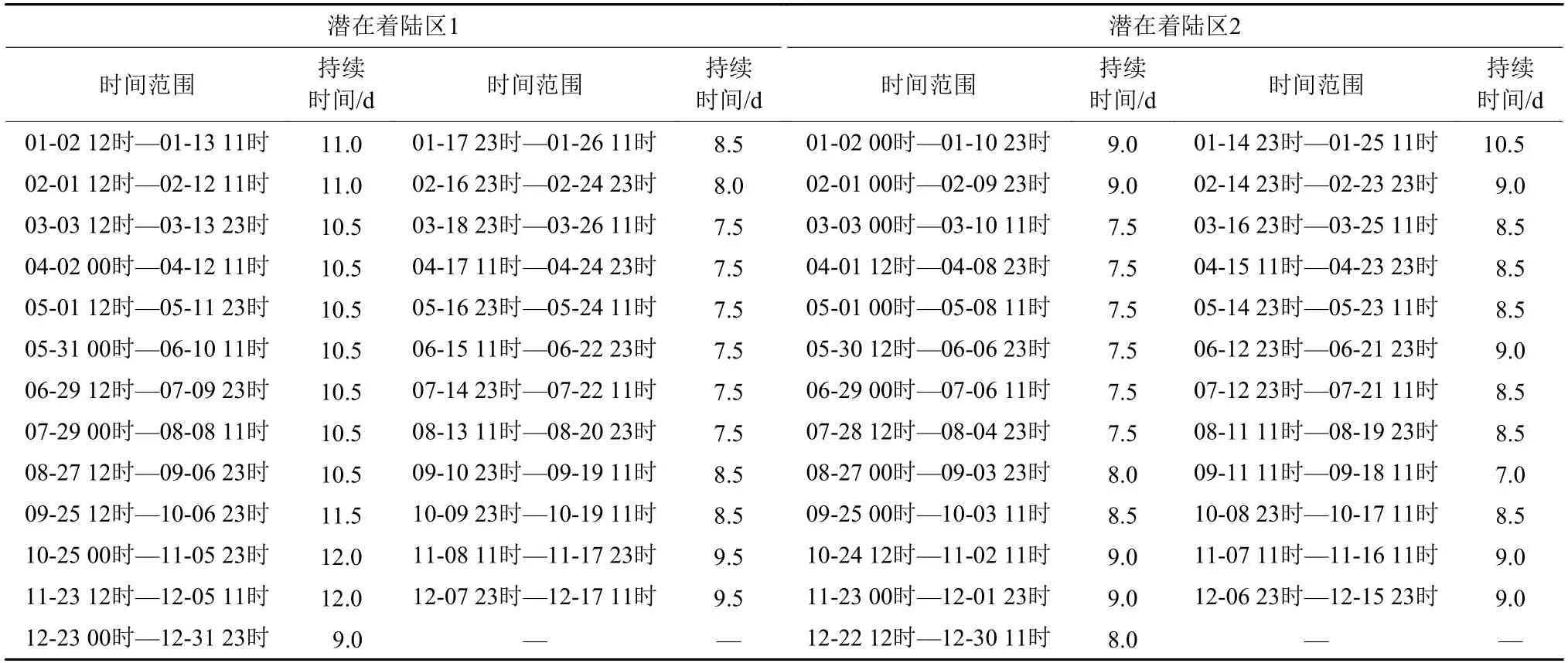
表1 潜在着陆区2026年连续太阳可见时间段级及持续时间分布Table 1 Periods of illumination at potential landing areas in 2026
4.2 不同高度的太阳光照特征
光照率反映了某一位置在特定时间段内的光照时间占比,但无法准确反映出该位置的连续光照特征。此外,从探测器本身来看,太阳翼往往是高于月面的,这对提高太阳可视系数具有关键作用。这里,假设着陆器太阳翼的最低高度距离月面为2 m,分别从潜在着陆区1和2选出光照率最大的位置,即潜在着陆点1,PLS 1(X=-2.81 km,Y=-6.59 km)和潜在着陆点2,PLS 2(X=-11.57 km,Y=-12.47 km)进行光照特征分析。图12(a)展示了PLS 1位置表面和2 m高度时的太阳可视系数f在2026年1月1日0时—12月31日23时的变化特征。对比月面太阳可视系数可以看出,在距离表面2 m高度时,部分时间段太阳可视系数略有增加,甚至从部分太阳可视变为完全可视。不过该时间范围内表面和2 m高度仍然存在间歇性的阴影,即f=0。对于增加的太阳可视系数,表示有更多的太阳辐射到达观测者,更有利于太阳能利用,即通过增加着陆器和巡视器太阳翼高度可以提高太阳能利用率。图12(b)为PLS 2的表面和2 m高度的太阳可视系数变化。相比PLS 1,该位置对太阳全年持续可视,且仅有5次明显的部分遮挡时间段。对于2 m高度,全年范围内太阳圆面完全可视,说明太阳翼在此高度可以达到最多的太阳辐射能量。
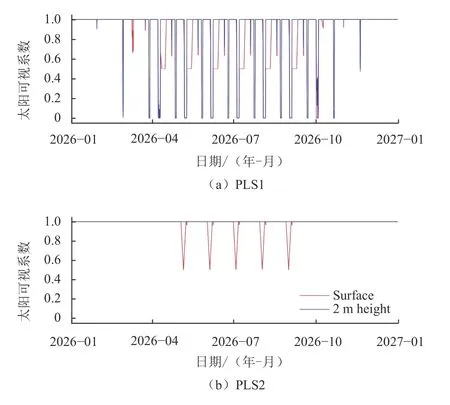
图12 潜在着陆点PLS 1和PLS 2的太阳可视系数Fig.12 Visible Sun fraction at potential landing sites PLS 1 and PLS 2
在太阳可视系数的基础上,进一步计算了PLS 1的日照时间和夜晚时间。由于PLS 2全年太阳可视,所以在2026年该位置常年光照。若以Shackleton撞击坑为探测目标,该位置距离目标显然较远。对于PLS 1,考虑更符合实际的距离月表2 m高的太阳翼高度,并且当f≥0.5时,太阳可视系数给定1;当f<0.5时,太阳可视系数给定0。由此计算出该位置2 m高度时的太阳光照时间和夜晚时间。图13展示了推测的2026年持续光照和夜晚时间分布。虽然光照和夜晚交替出现,但是光照时间显然是长于夜晚的,最长光照时间可达57.1 d,最长夜晚也仅为2.6 d,说明该位置是有利于太阳能利用的。值得注意的是,如果着陆器和巡视器在该着陆点能保证夜晚期间( <2.6 d)热控系统和相关载荷的正常工作,一方面可以避免系统重复开关延长寿命,另一方面可以保证相关载荷不受夜晚影响而持续工作。

表2 不同分辨率条件下15 km × 15 km研究区坡度对着陆区面积的约束对比Table 2 Comparison of total areas constrained by different slopes under different spatial resolution km2
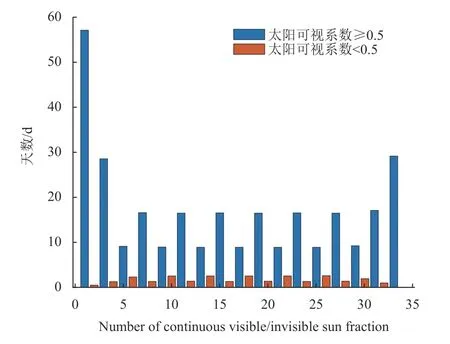
图13 潜在着陆点1距离表面2 m高度时的2026年的光照和夜晚时间统计Fig.13 Variation of visible/invisible Sun at 2 m height above PLS 1 in 2026
4.3 南极区域潜在着陆区分析
已有的光照条件研究表明Shackleton坑缘及附近山脊均具有较好的光照条件,这些可作为着陆选址和太阳能利用的潜在区域。同样基于光照和坡度约束条件下进行的研究区精细网格划分方法,进一步分析了以Shackleton撞击坑为探测目标的更大范围的南极区域( >88.5°S)潜在着陆区选址分析。不过这里采用已经公开发布的空间分辨率为60 m/pixel的DEM和覆盖多个18.6 a进动周期的光照率(http://imbrium.mit.edu/),作为分析的输入条件。值得一提的是,这里没有选择与上文一致的20 m/pixel分辨率数据作为输入条件主要是因为计算覆盖88.5°S以上区域的光照条件需要消耗大量的计算机资源和时间。除非是针对已经确定的目标区域进行计算,否则这种大范围、高分辨率的光照计算效率比较低下。不过该数据也同样覆盖了上文的研究区,可以用来对比分析。当然,由于空间分辨率不同导致会着陆区筛选差异,将在4.4节详细讨论。
采用本文的着陆区选择方案,首先将极区( >88.5°S)坡度图和光照率分布图同时按照1 × 1 km网格进行划分。其次,选择域坡度 ≤15°且光照率 ≥60%的区域。最终选出了符合条件的8 个潜在着陆区(PLA),其分布位置如图14所示(红色框)。需要注意的是,其它一些位置也有符合约束条件的潜在着陆区分布,但是主要表现为分散不连续特征,且单个网格内的像元个数小于15个且呈散点状分布,不利于工程着陆和表面巡视探测。从这些潜在着陆区的分布特征来看,PLA 1、PLA 3、PLA 4主要分布在Shackleton坑缘,覆盖的面积分别为0.45、0.122 4和0.104 4 km2。PLA 7和PLA 8主要分布在de Gerlache撞击坑(88.344 7°W,88.484 9°S)坑缘,覆盖的面积分别为0.122 4和0.349 2 km2。PLA 2、PLA 6主要分布于前两个撞击坑之间的山脊,覆盖的面积分别为0.262 8和0.111 6 km2。PLA 5主要分布在Shackleton与Slater撞击坑(111.288 1°E,88.079 2°S)之间的山脊,覆盖面积为0.0 8 6 4 k m2。可见潜在着陆区主要分布在Shackleton坑缘及附近山脊区域,这对以Shackleton坑底为探测目标的选址来说是十分有利的。从探测距离看,PLA 1、PLA 3和PLA 4距离最近,其次是PLA 2,最后是PLA 5和PLA 6。PLA 7和PLA 8距离太远,显然不适合作为Shackleton撞击坑探测的潜在着陆区。

图14 南极( >88.5°S)所有区域的潜在着陆区分布Fig.14 Distribution ofpotential landing sites at polar regions ( >88.5°)
NASA于2022年8月19日公布了Artemis载人登月第三阶段13个候选着陆区(https://www.nasa.gov/pressrelease/nasa-identifies-candidate-regions-for-landing-nextamericans-on-moon),这些候选着陆区均分布在84°S以上且范围为15 km × 15 km。从已有的报道来看,NASA分别从科学和工程方面对着陆区选择进行了约束,其中科学方面这些着陆区都邻近永久阴影区,水冰和挥发分都是潜在的探测目标;工程方面主要是考虑着陆的安全性,具体指标包括坡度、地月通讯、光照条件。当然NASA还联合地面发射系统火箭、载人着陆舱和返回舱等系统进行了综合评估。这13个区域所包含的潜在着陆点均可以接收连续6.5 d的太阳光照,正好可以覆盖任务规划中宇航员在月面的活动时间。本文基于精细网格划分给出的8个候选着陆区以1 km2为基本单元,相比NASA给出的15 km × 15 km范围更为具体。通过对比发现,选出的PLA 1、PLA 2、PLA 5、PLA 6、PLA 7、 PLA 8均在NASA给出的候选着陆区域内。而PLA 3和PLA 4均位于Shackleton撞击坑的坑缘,并未被NASA给出的候选着陆区覆盖。从对比结果来看,说明提出的着陆区选择方法是具有一定的合理性和可行性的。
4.4 空间分辨率对着陆区选择的影响
相比米级尺度的着陆器和巡视器,基于几十米级别空间分辨率的DEM来进行的着陆区选择显然过于粗糙。这为准确评估潜在着陆区的月表地形特征、光照条件带来一定的不确定性,也给工程探测带来潜在的风险。为了进一步讨论空间分辨率差异给选址带来的影响,仍然以本文重点关注的15 km × 15 km研究区(图14蓝色方框)为例,详细对比20 m/pixel和60 m/pixel分辨率的地形和光照率数据对着陆区选址的影响。
表2给出了仅依据坡度作为约束条件下在不同DEM分辨率时的可选着陆区面积对比。显然,基于更低分辨率(60 m/pixel)的地形数据所选出的着陆区面积均大于高分辨率(20 m/pixel)的面积。对于研究区内坡度 ≤5°的约束,二者面积差为1.016 4 km2,约282个60 m/pixel像元或254 1个20 m/pixel像元。注意这里的面积差均指60 m/pixel与20 m/pixel分辨率条件下的可选着陆面积之差。随着坡度增大到 ≤15°和 ≤25°,二者面积差分别增大到4.072 8 km2和4.630 8 km2。说明由分辨率引起的着陆区面积误差随坡度增大而增大,主要分布在坡度 ≤15°约束条件内。而本文给出的着陆选址安全坡度上限正是15°,因此更需要重点关注DEM分辨率对评估着陆区大小和分布的影响。
考虑光照率作为着陆选址的唯一约束条件,表3列出了不同分辨率地形条件下可选着陆面积随着光照率的变化对比。当选择较低的光照率约束( ≥50%)时,20 m/pixel对应的可选着陆面积要大于60 m/pixel着陆面积0.740 4 km2。说明部分60 m/pixel的像元对应的光照率虽然小于50%,但其涵盖的9个20 m/pixel像元当中至少有一个是大于50%的。随着光照率约束的提高,低分辨率对应的面积则始终大于高分辨的。这主要是由于高光照率位置主要分布于坑缘和山脊区域,低分辨率单个像元的面积始终大于等于其包含的9个20 m/pixel像元面积之和。从面积差上来看,随着光照率约束的提升,由分辨率引起的着陆区面积误差在减小。因此,在后期研究中可针对特定区域开展更高分辨率(如5 m/pixel)的光照率计算,以此来提高目标区域着陆点选择的精确度,并进一步计算太阳连续光照和夜晚时间,从而为太阳能的利用方案提供更为可靠的参考。
针对本文研究区选择的潜在着陆区PLA 1和PLA 2,通过同时选择坡度 ≤15°和光照率 ≥60%这两个约束条件对着陆区面积进行对比。需要注意的是,图14中的PLA 1和PLA 2与图9中的潜在着陆区覆盖的范围是一致的。从表4可以看出,60 m/pixel分辨率对应的可选面积是20 m/pixel分辨率的2倍以上,可见分辨率对评估着陆区的面积具有十分重要的影响。在后续工作中,若“嫦娥七号”以这两个区域作为着陆后选区,将十分有必要利用更高分辨率的地形数据开展光照条件研究,以便更加准确地评估着陆区面积以及着陆区的位置信息。从而为着陆区选址提供更精确的参考,以降低工程探测风险。潜在着陆区20 m/pixel60 m/pixel面积差

表4 不同分辨率条件下15 km × 15 km研究区内坡度 ≤15°光照率 ≥60%时可选区面积对比Table 4 Potential landing areas constrained by slope less than 15° and illumination rate greater than 60% under different spatial resolutions km2
为了进一步讨论分辨率对着陆区分布和选址的影响,以本文在15 km ×15 km研究区内选出的两个局部潜在着陆区(图9黄线和红线包围区域)为例来分析不同分辨率下的着陆区特征。图15展示了在同一约束条件(坡度 ≤15°且光照率 ≥60%)下,由不同空间分辨率给出的潜在着陆区分布特征(绿色区域)。可以看出分辨率较高的图15(a)、(b)能够更清晰地反映出着陆区内符合约束条件的像元分布特征,且像元个数分别达到413个和281个。这可为准确识别和确定目标着陆点位置和坐标提供重要的参考依据。与之相比,图15 (c)、(d)选出的潜在着陆区分布相对模糊且丢失了更多的细节特征,对应的像元个数仅分别有125个和73个。对比图15(a)、(c)以及图15(b)、(d)可以发现:1在高分辨率着陆区图上一些满足约束条件的位置在低分辩图上发生了丢失;2在高分辨率着陆区图上一些原本分离但邻近的像元在低分辩率着陆区图上发生了合并。这样导致的结果就是,基于低分辩率数据给出的着陆点位置范围过大或者坐标不够精确。这给将来的着陆点选择和月面任务规划带来更大的不确定性和风险。因此,基于高分辨率地形数据开展局部着陆区选址和风险性评估是关键且必要的。
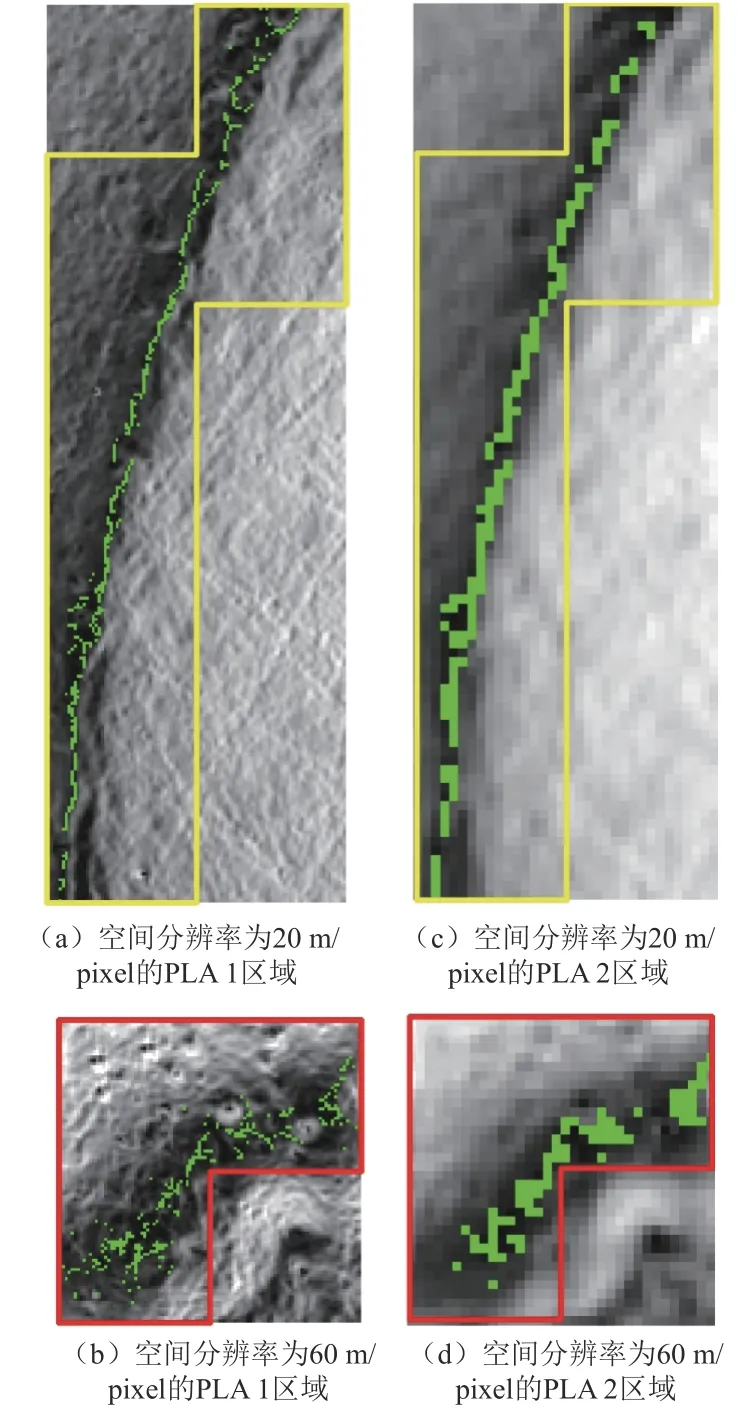
图15 相同坡度和光照率约束条件下不同分辨率的潜在着陆区特征对比Fig.15 Comparison of potential landing areas with the same constraints of slope and illumination rate but under different spatial resolutions
5 结论
以月球南极探测为背景,根据20 m/pixel的DEM数据计算了南极点附近15 km × 15 km范围的2026全年光照条件和坡度分布。提出了通过划分精细网格并以光照和坡度作为约束的方法,对目标区域的潜在着陆区分布范围和面积变化规律进行了详细的探讨。基于以上方法,利用覆盖极区88.5°S以上60 m/pixel分辨率的光照率和地形数据,得到了8个潜在着陆区,为着陆区选择和后续利用更高精度地形数据开展目标区域的着陆点选择提供了参考。
