基于奇异摄动分解的弹性飞机乘坐品质控制
2023-11-21李钊星王霞王敏文沈健许斌
李钊星, 王霞, 王敏文, 沈健, 许斌
(1.西北工业大学 自动化学院, 陕西 西安 710072; 2.航空工业西安飞行自动控制研究所, 陕西 西安 710065)
为实现节省燃油的经济性目标,现代客机呈现轻结构、大柔性和低阻尼等特点,气动弹性问题日益明显[1]。客机飞行过程中不可避免遭遇不同类型、强度和方向的风场,造成机体弯曲振动、客机颠簸和晃动加剧,降低乘客乘坐舒适性,引发驾驶员操纵失误,对飞行安全构成较大隐患[2]。为降低风场扰动对客机飞行安全与机上乘员的乘坐舒适性影响,早期研究由于工程技术限制,通常只能采取添加机械弹簧、阻尼器和惯性装置等结构被动抵抗风干扰[3]。部分学者提出使用机械网络式减震器[3]、流体制动器[4]等部件实现客机乘坐品质改善。随着航空技术发展,借助前后缘襟翼、扰流板[5]等非常规控制面提升乘坐舒适性成为当前工程实际中较为常见的一种方式。上述操纵装置通常还承担增加升力或减缓飞行速度等作用,响应较慢且不能根据风场特性自适应偏转[6]。
针对已有研究的局限性,部分学者基于常规控制舵面改善客机乘坐品质。文献[7]借助非定常气动力有理函数拟合方法建立时域连续阵风响应方程,通过控制副翼和升降舵抑制飞机颠簸。文献[8]基于状态空间涡格法建立飞行器阵风气动力模型,并通过鲁棒控制器设计副翼偏转,有效降低气动弹性系统对阵风扰动的敏感性。文献[9]针对翼身融合布局客机操纵性差、抗干扰能力弱等问题,设计自抗扰控制器控制升降舵,改善乘客乘坐舒适性。
考虑客机实际飞行过程风扰动的影响,部分研究基于传感器和观测器获得风扰动信息,并通过控制舵面自适应调节,提升乘坐品质。文献[10]利用多普勒激光雷达传感器测量机头处的风场轮廓,据此设计H∞最优控制提升飞机乘坐品质。文献[11]考虑风切变效应建立干扰动力学模型,基于法向过载反馈设计鲁棒控制器抑制风扰动。文献[12]利用观测器估计风扰动产生的弯矩,设计H∞控制器减缓风扰动产生的附加机翼载荷。文献[13]通过观测器估计阵风扰动信息并设计前馈控制器,与翼根载荷反馈控制器结合组成乘坐品质控制系统。部分学者考虑气动弹性[14-15]影响,开展柔性客机乘坐品质研究。文献[16]建立柔性机翼有限元模型并根据输出反馈和状态观测器进行控制器设计。文献[17]基于阵风扰动下的柔性飞机状态空间方程,设计预测控制律改善乘坐品质。文献[18]考虑飞行过程中参数摄动及阵风扰动对弹性机翼气动特性的影响,建立参数不确定性的线性分式变换模型,并设计鲁棒控制器抑制机翼颤振。
基于以上分析可知,已有研究忽略弹性模态在风扰动时带来的附加结构载荷,仅考虑刚体飞机进行乘坐品质控制器设计,部分研究考虑弹性振动影响建立刚弹一体化模型,仅依赖模型本身的稳定裕度使系统趋于稳定,未设计主动反馈控制抑制弹性模态。本文建立大型客机刚弹一体化模型,设计基于奇异摄动分解的乘坐品质控制方法[19],该方法将客机模型解耦为刚性慢变子系统和弹性快变子系统,并针对2个子系统分别设计控制器,通过二者共同作用改善弹性客机乘坐品质。针对刚性子系统,考虑风干扰引起的附加过载扰动和气动不确定,采用神经网络处理气动不确定性,设计扰动观测器估计风干扰,结合法向过载和俯仰角速率跟踪误差设计自适应鲁棒控制,针对弹性子系统设计非奇异终端滑模鲁棒控制抑制振动模态。仿真结果表明,在离散突风和大气紊流作用下所提方法能够降低飞机关键位置处的附加法向过载,实现振动主动抑制并有效提升弹性客机乘坐品质。
1 问题描述
1.1 大型弹性客机动力学模型
考虑如下大型弹性客机动力学模型
(1)


1.2 动力学模型变换
考虑弹性客机的法向过载为
(2)
进一步可知

(3)
定义x1=nz,x2=q,并考虑弹性客机受到风场扰动后时变干扰dw和dq,可知
(4)

1.3 奇异摄动分解弹性客机动力学模型

(5)
令η=0,则气动力滞后根的状态变量xa迭代后,其值保持为0。忽略弹性模态对刚性慢变量的影响,则(5)式可近似写为
(6)

则刚性慢变子系统变换为

(7)
(7)式可近似写为
(8)
式中
式中
1.4 控制目标
基于奇异摄动分解后的刚性子系统和弹性子系统,本文控制目标是对刚性慢变子系统设计自适应鲁棒控制,对弹性快变子系统设计非奇异终端滑模控制,综合两者设计得到乘坐品质控制律,降低风扰动下机头、机身和机尾位置处的附加法向过载,提升弹性客机乘坐品质。
2 风扰动及乘坐品质评价准则
典型风场扰动包括离散突风和大气紊流。采用国军标[21]中的1-cos离散突风和大气紊流模型模拟风干扰影响。
1-cos离散突风模型为
(10)
式中:Vwind为风速;Vm为风速的最大值;dm为离散突风的尺度;τ为突风空间变量。
冯卡门大气紊流模型的谱密度函数为
(11)
(12)
(13)
式中:w为角频率;Lu,Lv和Lw为紊流尺度;σu,σv和σw为紊流速度的均方值。
采用阵风减缓率、乘坐品质准则C指标[22]以及乘坐不舒适指标[23]作为乘坐品质评价准则。
阵风减缓率定义为
η=(n1-n2)/n1
(14)
式中:n1为不加入乘坐品质控制输出的过载响应均方根值;n2为加入乘坐品质控制后输出的过载响应均方根值。
C准则的表达式为

(15)

国军标中乘坐不舒适性指标的表达式为

(16)
式中:Di为乘坐不舒适指标(法向或横向);W(f)为加速度加权函数(法向或横向);Tcs(f)为乘客位置处的传递特性;Φu(f)为冯卡门阵风强度功率谱密度;f为客机弹性模态频率;ft为截断频率,当f高于截断频率时,在紊流中气动弹性响应不明显。乘坐不舒适指标的评价准则如表1所示。
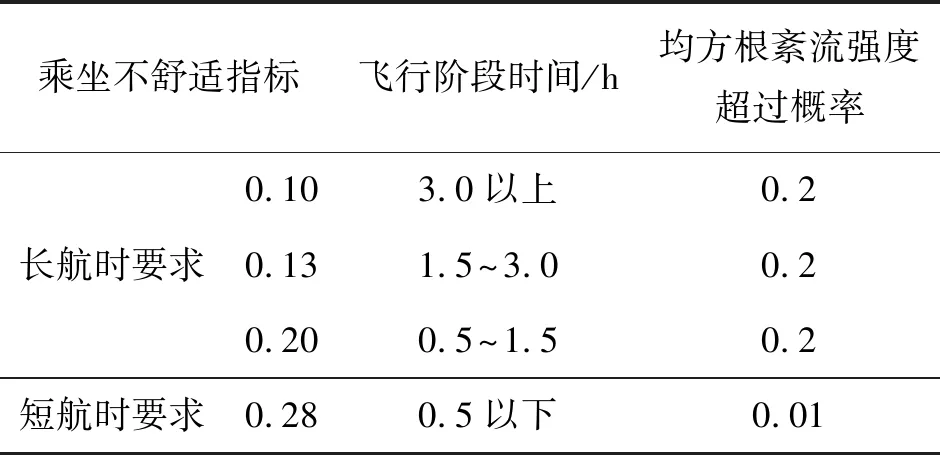
表1 乘坐不舒适指标
3 乘坐品质控制器设计
针对奇异摄动分解得到的刚性子系统和弹性子系统分别进行控制器设计,并将控制输入叠加,共同组成乘坐品质控制的舵面偏转。
3.1 刚性慢变子系统自适应鲁棒控制
步骤1定义法向过载跟踪误差e1=x1s-x1d,x1d为期望法向过载,利用神经网络逼近Fnz,可得法向过载误差动力学为

(17)
设计俯仰角速率虚拟控制x2c为

(18)

令虚拟控制量x2c通过一阶滤波器,可得

(19)
式中:x2d(0)=x2c(0),κ2>0为设计参数。
定义俯仰角速率跟踪误差为e2=x2s-x2d,法向过载跟踪误差e1的导数为

(20)

为消除x2d-x2c的影响,设计补偿信号为

(21)
式中:m1(0)=0,m2在步骤2给出。
定义补偿后的跟踪误差v1=e1-m1和v2=e2-m2,则v1的导数为

(22)
设计预测误差z1为
(23)
式中,kz1>0为设计参数。
设计自适应更新律为

(24)
式中,γ1>0,γz1>0和ζ1>0为设计参数。
设计扰动观测器为
(25)
式中:P1>0为设计参数。
步骤2利用神经网络逼近Fq,俯仰角速率误差动力学为

(26)
设计刚体慢变子系统升降舵偏转δes为

(27)
俯仰角速率跟踪误差e2的导数为

(28)

设计补偿信号为

(29)
式中,m2(0)=0。
补偿后的跟踪误差v2的导数为

(30)
设计预测误差z2为
(31)
式中:kz2>0为设计参数。
设计自适应更新律为

(32)
式中,γ2>0、γz2>0和ζ2>0为设计参数。
设计扰动观测器为
(33)
式中,P2>0为设计参数。
3.2 弹性快变子系统非奇异终端滑模控制
(34)
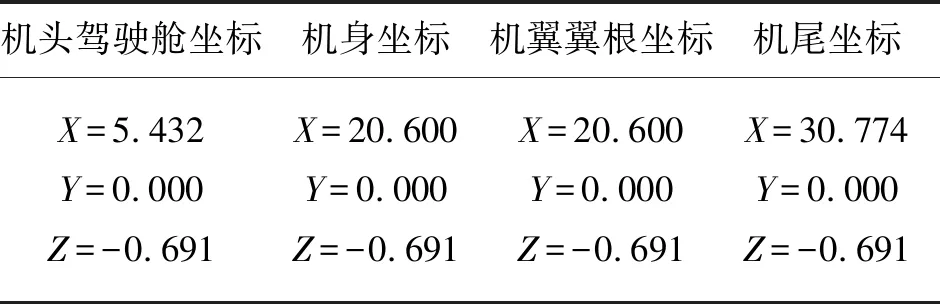
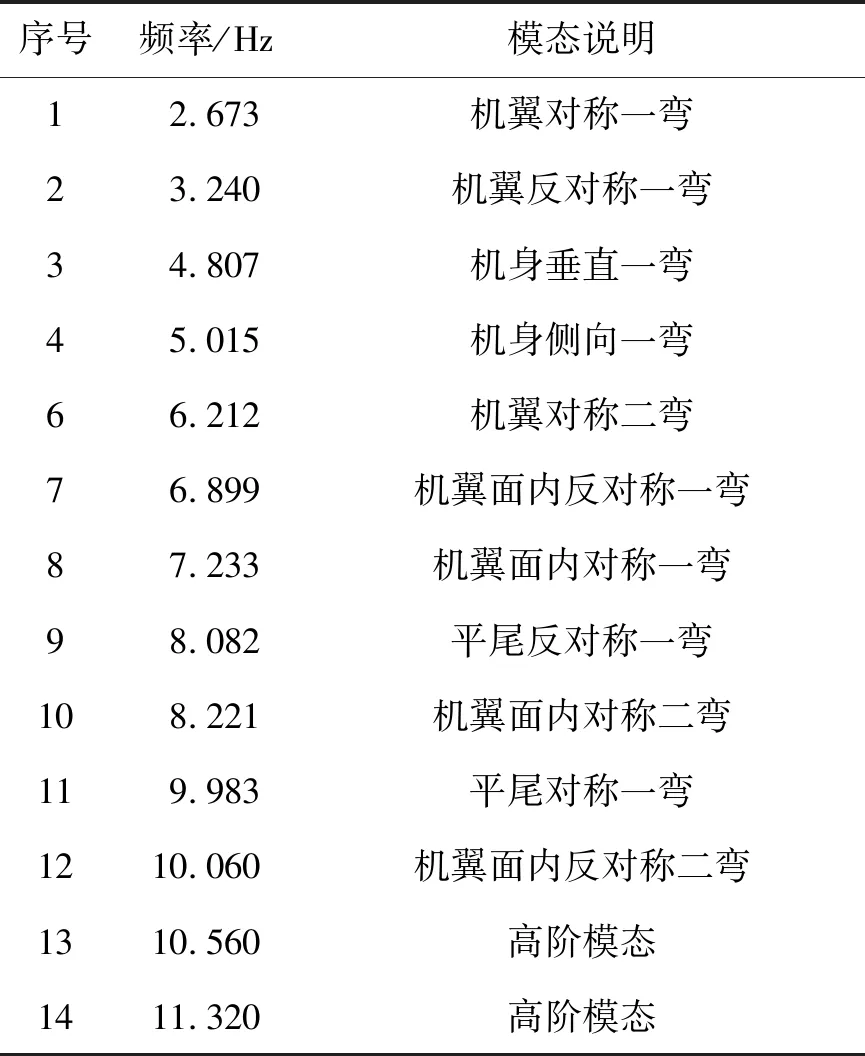
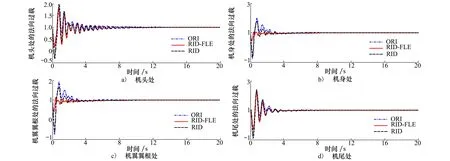
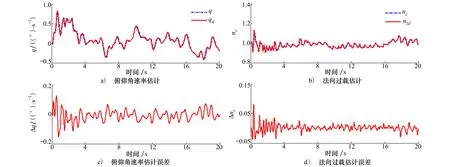
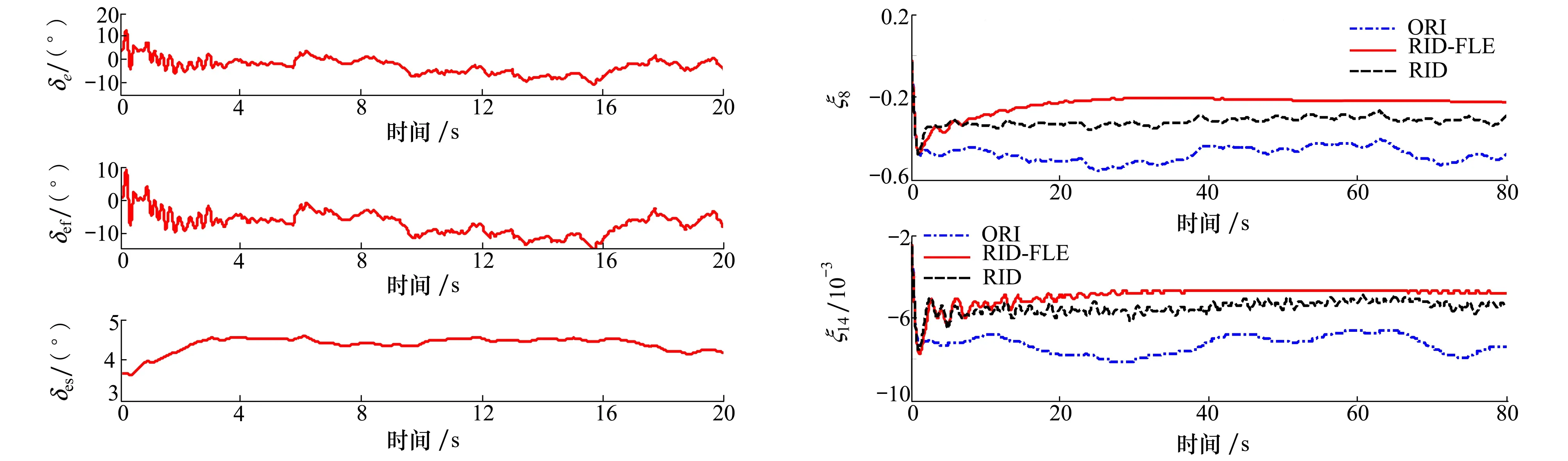
式中:c2>0为设计参数;pc和qc均为正奇数且满足1 滑模面误差动力学为 (35) 设计弹性快变子系统舵面偏转δef为 (36) 式中:ks>0为设计参数。 基于刚性慢变子系统舵面偏转δes和弹性快变子系统舵面偏转δef,得到乘坐品质改善控制系统的舵面偏转δe=δes+δef。 证明选择李雅普诺夫函数VL为 VL=V1+V2 (37) 式中 则VL的导数为 (38) 考虑以下不等式 则(38)式可进一步写为 (39) 式中 选择控制参数使得PLi>0和ζLi>0,可得 (40) 式中,l=min{2ki,2PLi,2ζLi,2kziγzi}。 进一步可得 (41) 由(41)式可知,李雅普诺夫函数(37)中的信号是一致终值有界的。 定理2考虑弹性快变子系统(9)式,设计升降舵偏转(36)式,则李雅普诺夫函数(见(42)式)中的信号es是渐进稳定的。 证明选择李雅普诺夫函数Vf为 (42) 对Vf求导可得 (43) 算例飞机为某大型双发民用运输客机,其空载质量为40 305.9 kg,绕质心俯仰转动惯量为Ixx=1.047×106kg·m2,Iyy=2.457×106kg·m2和Izz=3.365×106kg·m2。以机头为参考坐标系原点,位置特性的主要参数如表2所示;各阶弹性模态的阻尼比为0.01,自然频率如表3所示。在进行仿真测试时,算例飞机的初始状态设置为:速度250 m/s,高度为1 500 m,配平攻角为2.78°。舵机特性为10/(s+10),舵面偏转速率限制为15°/s,位置限制为±30°。 表2 算例飞机的位置特性主要参数 m 表3 算例飞机的14阶弹性模态自然频率 参考国军标[21],设定1-cos离散阵风的阵风尺度为50 m,阵风强度为15 m/s;设定大气紊流沿机体轴三轴的风干扰强度参数分别选取轻扰动和中等扰动,轻扰动的风干扰强度为σw=1.5 m/s,σu=σv=2.12 m/s,紊流尺度为Lu=2Lv=2Lw=530 m;中等扰动风干扰强度为σw=σu=σv=6.4 m/s,紊流尺度为Lu=2Lv=2Lw=530 m。 仿真步长和仿真周期分别设置为0.01和20 s。仿真过程中,飞机从初始时刻即遭遇风扰动。对于弹性快变子系统,控制器参数设置为c2=1,ks=3,pc=5和qc=3。对于刚性慢变子系统,控制器参数设置为k1=2和k2=4,一阶滤波器参数设置为κ2=0.02,更新律参数设置为γi=1,γzi=1,ζi=0.001和kzi=0.1,i=1,2,扰动观测器参数设置为P1=2.3和P2=1.2。 为验证所提方法的有效性,本文所提基于奇异摄动分解的乘坐品质控制方法记为“RID-FLE”,而传统只反馈刚体状态,不反馈弹性模态的乘坐品质控制方法记为“RID”,不加入乘坐品质控制记为“ORI”。客机处于阵风尺度为50 m的1-cos离散阵风下,飞机机头、机身、机翼翼根和机尾处的过载响应结果如图1所示。 图1 客机关键位置处的法向过载(1-cos阵风) 由仿真结果可知,2种乘坐品质控制策略均能够减缓风扰动时客机的过载,针对客机各个位置的法向过载峰值,“RID”方法的减缓效果分别为9.23%,8.43%,9.55 %和13.16%。“RID-FLE”方法的减缓效果为36.2%、70.2%、66.29%和31.58%,对阵风减缓效果更好。 客机处于轻扰动和中等扰动大气紊流干扰下,客机机头、机身、机翼翼根和机尾处的过载响应结如图2和图3所示。 图2 客机关键位置处的法向过载(轻扰动大气紊流) 图3 客机关键位置处的法向过载(中等扰动大气紊流) 由仿真结果可知,“RID-FLE”方法相较于“RID”方法能够使客机关键位置处的过载更加平稳。 轻扰动大气紊流引起的客机机头、机身、机翼翼根和机尾处的阵风减缓率如表4所示。由表4可知,当客机受到轻扰动大气紊流后,在客机机头、质心、机尾和机翼翼根处,采用“RID-FLE”方法的减缓率相较于“RID”方法均有所提升,在机尾位置处减缓效果提升最大,达到11.2%。 表4 大气紊流(轻扰动)减缓率 % 中等扰动大气紊流引起的客机机头、机身、机翼翼根和机尾处的阵风减缓率如表5所示。由表5可知,当客机受到中等扰动大气紊流后,在客机机头、质心、机尾和机翼翼根处,采用“RID-FLE”方法的减缓率相较于“RID”方法均有所提升,在机身位置处减缓率提升最大,达到31.67%。 为准确评价算例飞机的乘坐品质,分别列举无乘坐品质控制、传统“RID”方法以及本文提出的“RID-FLE”方法进行评估,处于中等大气紊流下客机关键位置处的乘坐品质C准则以及乘坐不舒适指标如表6和表7所示。 表6 大气紊流(中等扰动) C准则 表7 大气紊流(中等扰动) 乘坐不舒适指标 由表6可得,处于中等扰动大气紊流影响下,无乘坐品质控制时客机乘坐品质C准则为“中等”,采用乘坐品质控制的客机能够改善C准则数值,从“中等”改善为“舒适”,而本文所提的“RID-FLE”方法的C准则指标更小、改善效果更优。 由表7可得,客机受到中等扰动大气紊流影响时,采用乘坐品质控制的客机能改善乘坐不舒适指标。且本文所提的“RID-FLE”方法相较于“RID”方法,能将客机关键位置处的乘坐不舒适性指标降低至小于0.1,满足长航时等级一标准。 通过图4可知,在扰动观测器和神经网络作用下,自适应更新律实现了法向过载和俯仰角速率的准确估计。由图5可知,乘坐品质控制中升降舵偏转处于合理范围之内。图6为部分弹性模态示意图,在“RID-FLE”方法控制下相关弹性模态最终收敛到稳态值。 图4 俯仰角速率、法向过载估计与估计误差 图5 升降舵偏转 图6 部分弹性模态 综上所述,所提出的基于奇异摄动分解的乘坐品质控制策略能够在风扰动下有效降低弹性客机过载波动,提升客机机头、机身、机尾和机翼翼根位置处乘客的乘坐品质。 本文针对大型弹性客机乘坐品质提升研究基于奇异摄动分解的自适应鲁棒控制方法。主要研究内容总结如下: 1) 采用奇异摄动方法对飞机进行刚弹模态解耦,忽略弹性模态广义速度和加速度的影响得到飞机刚性慢变子系统,引入新的时间尺度得到飞机弹性快变子系统。 2) 针对刚性慢变子系统,借助扰动观测器估计附加扰动并采用神经网络处理模型不确定性,结合法向过载和俯仰角速率跟踪误差设计自适应鲁棒控制器,针对弹性快变子系统设计终端滑模控制器,结合2个子系统的控制输入组成乘坐品质控制律。 3) 通过李雅普诺夫定理对系统稳定性进行了分析,仿真结果表明所提方法在客机受到1-cos阵风或中等扰动大气紊流影响下,对关键位置处的阵风减缓效果为31.58%和45.2%,弹性客机乘坐品质由“中等”改善为“舒适”,满足乘坐不舒适性指标中的长航时等级一标准。
4 稳定性分析




5 仿真分析

6 结 论
