基于扩展卡尔曼滤波算法的车辆参数估计
2023-11-21熊俊程李强飞
熊俊程,李强飞,张 岩
基于扩展卡尔曼滤波算法的车辆参数估计
熊俊程,李强飞,张 岩
(长安大学 汽车学院,陕西 西安 710064)
为解决智能汽车传感器测量质心侧偏角成本高昂的问题,文章提出了通过扩展卡尔曼滤波(EKF)算法降低测量成本的方法。基于Dugoff轮胎模型在MATLAB/Simulink软件中构建车辆非线性二自由度仿真模型,利用EKF算法设计车辆参数和轮胎侧偏力的状态观测器,设计了一种适应多工况条件的自适应协方差矩阵。对设计的算法进行多种典型工况实验仿真验证,与汽车动力学软件CarSim同工况下进行曲线对比,仿真值与估计值基本吻合。结果表明,所设计的车辆参数估计算法具有良好的多工况适应能力,具有一定的实用性。
EKF算法;质心侧偏角;横摆角速度;Dugoff轮胎模型
随着电子技术的不断发展,传感器技术发展日新月异,智能汽车装载大量传感器用于测量车辆运动过程中的一系列参数。但在关于质心侧偏角这一汽车动态控制的关键参数上,仍然存在较大问题。市面上的全球定位系统(Global Position- ing System, GPS)、加速度计、陀螺仪等传感器由于硬件的限制,容易受到外界的干扰,产生较大的测量误差,不利于较直接应用于质心侧偏角估计[1]。
为保证车辆侧滑角估计精度和实时性,采用低成本传感器,结合车辆动力学和运动学构建合适的算法成为质心侧偏角估计的主流方法[2]。文献[1]采用自适应容积卡尔曼滤波(Adaptive Cubature Kalman Filter, ACKF)的车辆质心侧偏角耦合估计方法,将车辆的行驶状态和轮速耦合引入滤波器的测量迭代中,同时设计自适应调节矩阵以提高估计精度。文献[2]分别构建类似于魔术轮胎、Uni-tire轮胎、Dugoff轮胎等非线性轮胎模型,分析轮胎与质心侧偏角的关系,搭建质心侧偏角观测器[3]。为了更准确地描述汽车运动工况中轮胎出现的非线性特性,本文建立非线性Dugoff轮胎模型用来描述车辆运动过程中轮胎出现的非线性特性。整理车辆二自由度方程,根据扩展卡尔曼滤波(Extended Kalman Filter, EKF)算法构建状态方程和观测方程,求出状态方程和观测方程的雅可比矩阵。结合Dugoff轮胎模型在MAT- LAB/Simulink搭建质心处侧偏角和侧向加速度观测器,为保证搭建的观测器兼顾精度和实时性,构建了自适应调节矩阵。
1 操纵稳定性分析模型的建立
建立二自由度线性车辆模型,并根据车辆动力学求解车辆状态参数和轮胎之间的函数关系。为提高估计精度需要更加准确的轮胎力,构建Dugoff轮胎模型计算运动过程中轮胎的受力情况。
1.1 汽车二自由度模型
在对质心侧偏角进行估计时,最关键的是构建合适的车辆动力学模型来表达质心侧偏角和轮胎参数之间的关系。动力学模型如图1所示[1-2]。
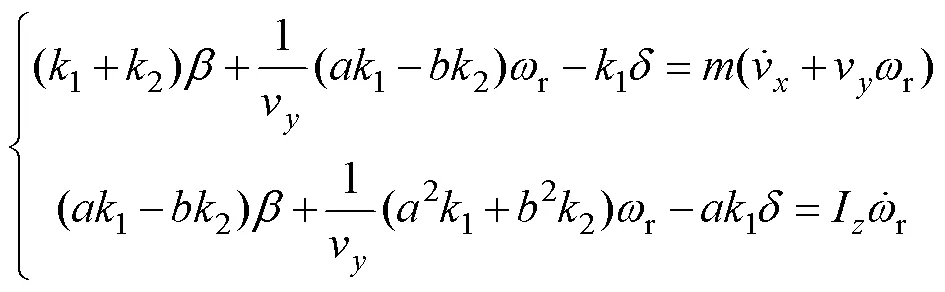
整理线性二自由度模型,如式(1)所示:
由于质心侧偏角较小,其中简化质心侧偏角,如式(2)所示:
另一方面,求解轮胎侧偏角与质心侧偏角之间的关系。已知汽车侧向加速度由汽车所受到的轮胎侧向力所提供,而轮胎侧向力是轮胎侧偏角和轮胎侧偏刚度的乘积,则计算得到前后轮胎侧偏角,如式(3)所示:
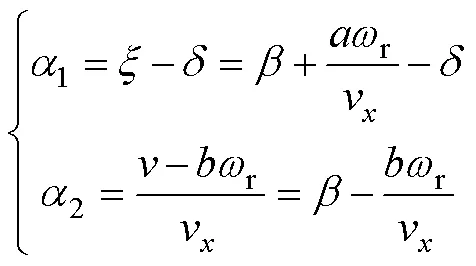
式中,1、2分别为前、后轮侧偏刚度;为质心距前轴之间的距离;为质心距前轴之间的距离;为车辆质心侧偏角;r为质心处横摆角速度;为前轮转角;I为车辆转动惯量;v、v分别为质心处速度沿车辆轴方向上分量。
图1 二自由度模型
1.2 Dugoff轮胎模型
当汽车运动状态进入非线性区域时,由于车辆前后轴的运动关系造成前后轴侧偏刚度发生变化,造成前后轴侧向力计算误差增大。为了更加精确地计算前后轴侧向力,构架Dugoff轮胎模型。该轮胎模型假定轮胎载荷在地面均匀分布,忽略了轮胎侧倾的影响[3],如式(4)所示:
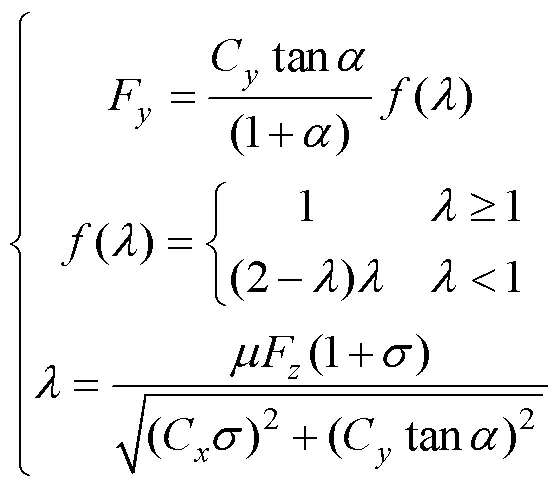
式中,C、C分别为轮胎侧向、纵向的侧偏刚度;为纵向滑移率;为轮胎侧偏角;为路面附着系数;F为垂向载荷。
2 扩展卡尔曼滤波算法
2.1 扩展卡尔曼滤波算法原理
EKF算法是一种利用前一时刻的估计值和当前时刻的观测值来对当前时刻状态变量估计的算法,通过构造观测值与估计值的误差协方差矩阵,得到最优估计值,常用于线性系统。EKF算法将用于非线性系统线性化,再应用该算法。本节在考虑车辆运动参数与质心侧偏角之间的关系后,根据汽车非线性二自由度模型搭建了EKF算法[4]。
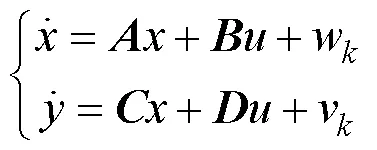
EKF算法一般通过两个微分方程来描述整个系统的控制过程。
系统状态方程为

系统测量方程为

式中,+1为+1时刻的系统状态矩阵;为时刻系统状态变量;1为+1时刻系统输入矩阵;(x,u1)为时刻系统观测矩阵;(x,u1)为系统观测函数方程;w1为系统计算过程中产生的过程噪声;v1是传感器测量时产生的观测噪声,普遍认为均值为零、方差为小值的高斯白噪声,两者之间的相关系数为零,相互不影响。
对于线性离散系统,卡尔曼滤波算法分为两个模块:预测模块和矫正模块。
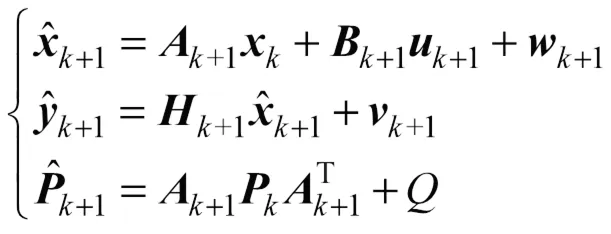
预测模块根据上一时刻的最优估计值计算出此刻的先验估计值和其误差协方差,如式(7)所示:
矫正模块是计算卡尔曼增益矩阵,结合观测值计算得到的增益矩阵和先验估计值得到后验估计值,同时更新下一时刻需要用到的误差协方差矩阵,如式(8)所示:
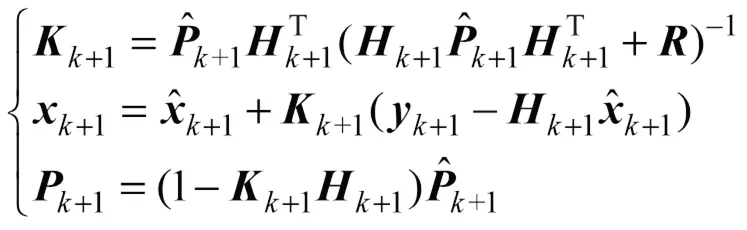
式中,1为+1时刻矫正系数矩阵;为观测器观测噪声的协方差矩阵;1是+1时刻最优估计值,即下一时刻的输入量;1为+1时刻最优估计值协方差矩阵。
2.2 质心侧偏角和横摆角速度联合估计
根据EKF算法的原理,构建了质心侧偏角和横摆角速度观测器[5-6]。将质心侧偏角和横摆角速度作为状态方程和观测方程的状态量=[,r],将前轮转角=[]作为输入量;将车辆侧向加速度a作为观测量;结合Dugoff轮胎模型和二自由度车辆模型整理公式得:
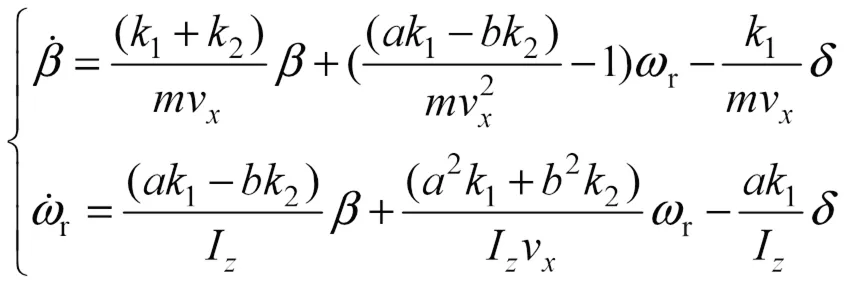
通过轮胎侧向力和汽车侧向加速度之间的几何关系可得:

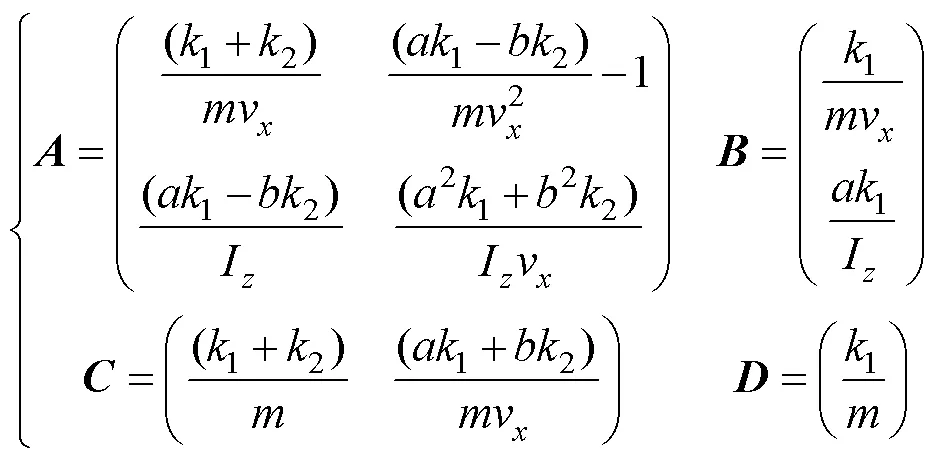
构建EKF算法状态方程和观测方程:
将式(9)、式(10)变形整理成式(11),其中矩阵如式(12)所示:
2.3 超参数变化
实际上,汽车在运动过程中系统噪声和量测噪声是随机产生的,具有变化的协方差特性,造成在滤波的过程中估计精度降低甚至发生滤波分散的现象。目前有关于EKF算法的质心侧偏角估计算法中通常将系统噪声协方差和观测噪声协方差设置为固定的协方差矩阵,在实时计算中并不能很好的保证估计精度[4-6]。整体算法流程图如图2所示。
为更好地对质心侧偏角和横摆角速度进行估计,本文设计了一种基于方向盘转角和车速的自适应协方差矩阵,将量测噪声协方差矩阵设计成随方向盘转角、车速变化而变化的矩阵。考虑到协方差之间的矩阵运算,将系统噪声协方差设置为(1e-3)×E,量测噪声协方差如式(13)所示:

3 多工况仿真验证
为验证算法在多工况下的精确度和鲁棒性,将MATLAB/Simulink搭建算法流程图与CarSim联合仿真,实时与CarSim输出的车辆状态参数进行对比。车辆参数如表1所示。
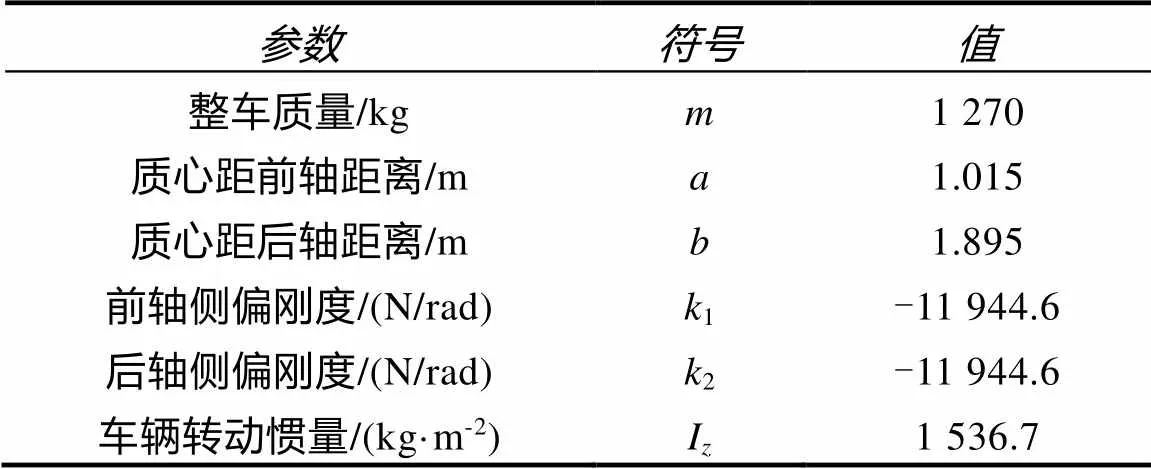
表1 车辆参数
3.1 角阶跃工况
为验证算法在不同稳态转换动态估计精度和鲁棒性,设置车速为70 km/h、方向盘角阶跃转角为30°仿真工况,仿真结果对比如图3所示。
由图3(a)可知,质心侧偏角在角阶跃工况下KEF算法较CarSim算法更快响应,相比于CarSim在到达另一个稳态过程中的微小震荡,KEF算法到达另一个稳态工况过程中更加平滑;由图3(b)得CarSim算法到达稳态时存在超调量,在极小时间内横摆角速度迅速到达稳态,KEF算法在较长时间、更加平稳的到达另一个稳态。结果表明设计的KEF算法在角阶跃工况下有着更好的响应效果和估计精度。
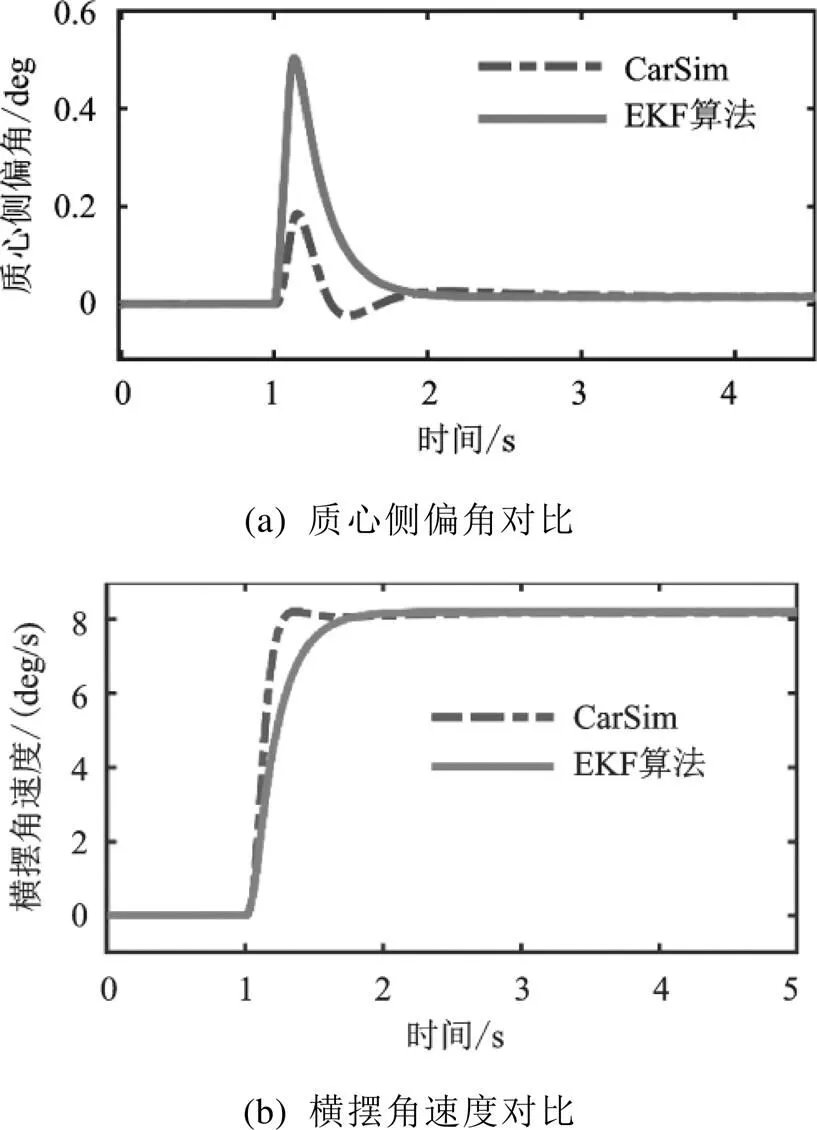
图3 速度70 km/h角阶跃30°工况
3.2 正弦转向工况
为验证算法在瞬态变化下动态估计效果,采用在不同速度下正弦转向工况。对于低速40 km/h方向盘转角输入为峰值为100°的正弦曲线,仿真结果如图4所示;对于高速100 km/h方向盘转角输入峰值为30°的正弦曲线,仿真结果如图4所示。
由图4(a)和图5(a)可知,在不同速度的方向盘转角正弦输入下,设计的EKF算法所观测出质心侧偏角估计值都可以动态跟随CarSim输出值,且保证有较好的精确度。由图4(b)和图5(b)可知,设计的EKF算法对横摆角速度的动态估计,与CarSim状态输出的横摆角速度基本保持一致。
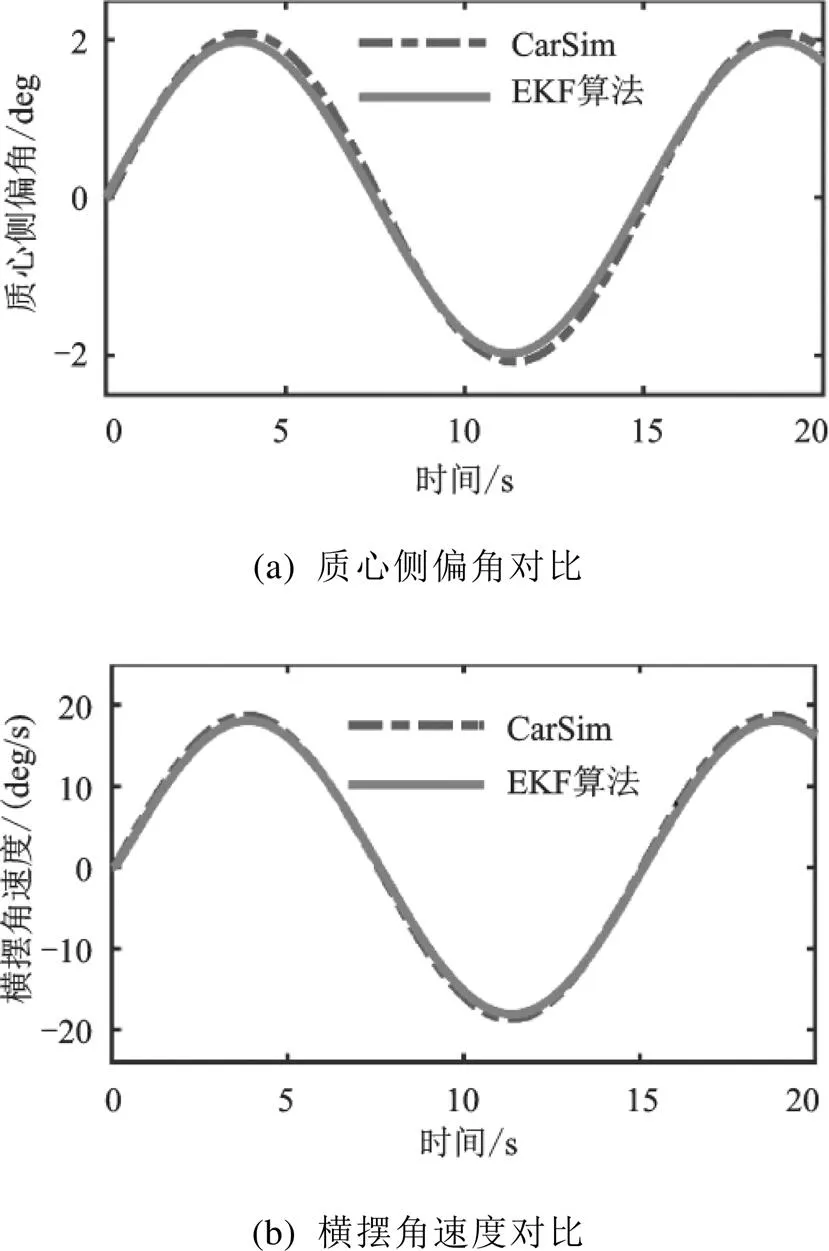
图4 速度40 km/h正弦峰值为100°转角工况
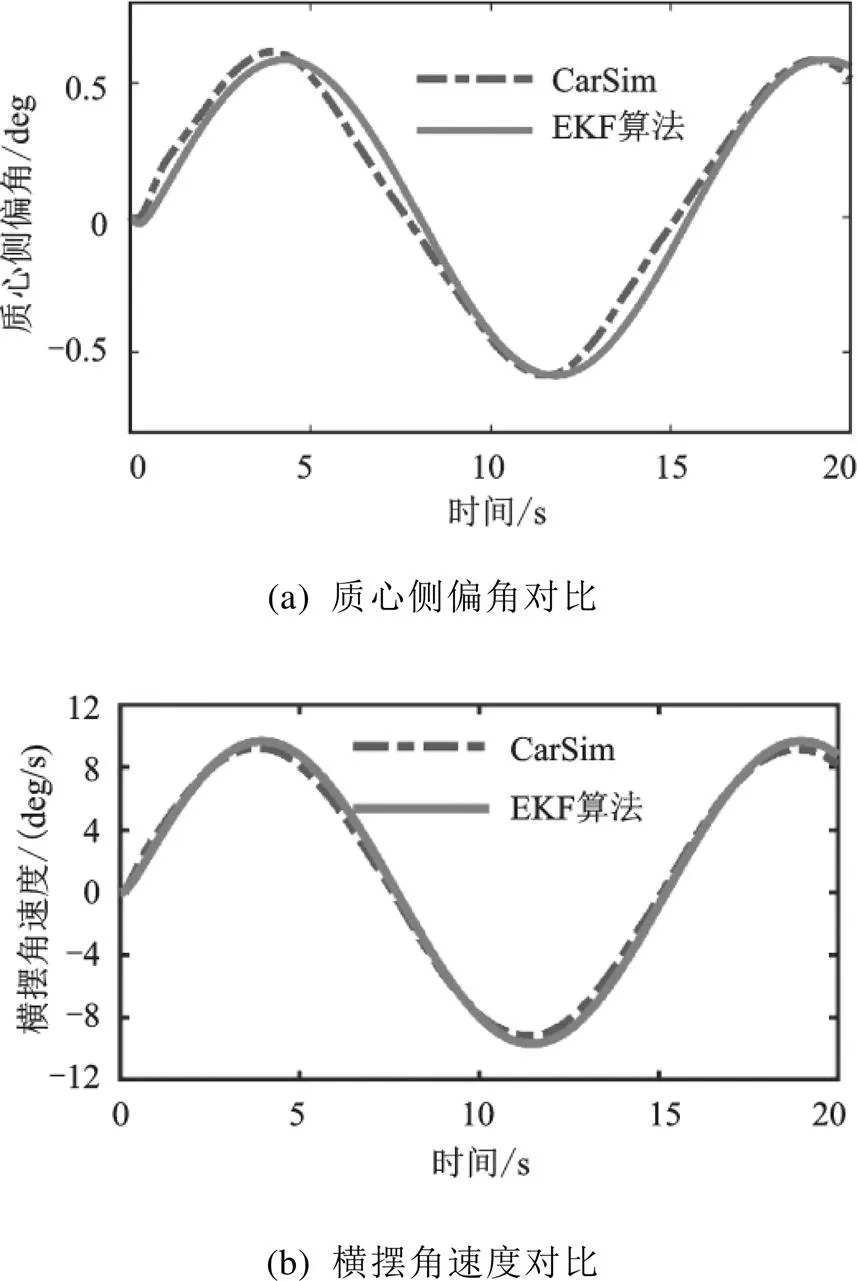
图5 速度100 km/h正弦峰值为30°转角工况
4 结论
本文通过Dugoff轮胎模型计算车辆在运动过程中轮胎力的变化,结合汽车二自由度模型构建非线性二自由度车辆模型,构建EKF算法。通过MATLAB/Simulink和CarSim联合仿真设计多工况仿真实验。结果表明设计的EKF观测器可通过简单有效的汽车二自由度模型,在多工况下比较精确地得到汽车实时状态的参数,算法有着良好的精确度和鲁棒性。
[1] 张婧,张芝雨,季晔.车辆质心侧偏角容积卡尔曼滤波软测量方法[J].机械设计与制造,2022(5):78-82.
[2] 张振宇.车辆动力学状态参数估计算法研究[D].长沙:湖南大学,2021.
[3] 张亮,石沛林,周龙辉,等.基于Dugoff轮胎模型对车辆质心侧偏角估计[J].广西大学学报(自然科学版), 2021,46(6):1523-1532.
[4] 王姝,赵轩,余强.基于自适应奇异值分解无迹卡尔曼滤波算法的车辆质心侧偏角估计[J].公路交通科技, 2020,37(12):133-141.
[5] 孙坚添,叶贻财,郭聪聪.具有噪声鲁棒性的车辆质心侧偏角估计[J]农业装备与车辆工程,2021,59(5):37-41.
[6] 李小雨,许男,郭孔辉.基于运动学方法和运动几何方法融合的质心侧偏角估计[J].机械工程学报,2020,56 (2):121-129.
Vehicle Parameter Estimation Based on Extended Kalman Filter Algorithm
XIONG Juncheng, LI Qiangfei, ZHANG Yan
( School of Automobile, Chang'an University, Xi'an 710064, China )
In order to solve the problem of high cost of measurement of centroid side deflection angle by intelligent vehicle sensor, a low-cost measurement method using extended kalman filter (EKF) algorithm is proposed in this paper. Based on Dugoff tire model, a vehicle nonlinear two-degree-of-freedom simulation model is constructed in MATLAB/Simulink software. The state observer of vehicle parameters and tire side force is designed by using EKF, and an adaptive covariance matrix is designed to adapt to multi-operating conditions. The designed algorithm is verified by experimental simulation in a variety of typical working conditions, and the curve is compared with that of CarSim, the vehicle dynamics software, under the same working conditions, and the simulated value is basically consistent with the estimated value. The results show that the designed vehicle parameter estimation algorithm has good adaptability to multiple operating conditions and has certain practicability.
EKF algorithm; Centroid side deflection angle; Angular velocity of pendulum; Dugoff tire model
U461.6
A
1671-7988(2023)21-54-05
10.16638/j.cnki.1671-7988.2023.021.011
熊俊程(1998-),男,硕士研究生,研究方向为车辆系统动力学,E-mail:15619223265@163.com。
