GYPOX Ⅱ陀螺全站仪在城市轨道交通贯通测量中的应用分析
2023-11-21罗喻真陈有为
罗喻真、陈有为
(1.武汉大学测绘学院,湖北 武汉 430072;2.武汉市市政建设集团有限公司,湖北 武汉 430023)
0 引言
城市地铁隧道大多位于城市建成区域地下,采用盾构法暗挖,隧道距离长,导线网网形较差,给控制测量带来极大的挑战和不确定性。在地下工程中,多采用传统的附和导线布设控制网,随着导线距离的增长,其最前端点位误差增长很快。对于超过2km 的地铁隧道,附和导线在没有其他定向方式矫正的情况下,横向贯通误差很可能超过10cm,不能保证盾构机的正常出洞[1]。《城市轨道交通工程测量规范》(GB/T 50308—2017)中要求,隧道单向贯通距离大于1500m时,应采用在隧道内加测陀螺方位角等方法提高控制网精度[2]。因此,在隧道掘进过程中,通常采用陀螺全站仪检核地下导线网方向精度。
1 GYPOX Ⅱ陀螺全站仪介绍
陀螺全站仪是一种陀螺仪和全站仪组合而成的仪器。陀螺仪用来确定真北方向,精度稳定,不受测量位置和导线长度的影响。全站仪基于陀螺仪定出的真北方向精确测定地面导线边和地下导线边的陀螺方位角,可以避免误差累积,提高地下导线方位精度,保证盾构机安全顺利出洞[3]。
1.1 陀螺全站仪的结构
索佳GYPOX Ⅱ陀螺全站仪采用上架式结构(见图1),即陀螺仪架设在全站仪上方。上架式结构的优点在于容易安置到强制对中点上,相比下架式陀螺仪有效地减少了对中误差。上架式陀螺全站仪的缺点是陀螺仪的重心较高,没有下架式结构稳定,在测量过程中可能产生晃动,影响陀螺定向结果。因此,在陀螺全站仪寻北过程中要尽量避免振动[4]。

图1 索佳GYPOX Ⅱ陀螺全站仪
1.2 陀螺的定向原理
陀螺仪内部悬挂带悬挂陀螺转子组成一个摆,陀螺摆内置在一个圆柱体中组成悬挂式陀螺仪。陀螺摆绕地球子午线摆动,陀螺摆中心方向即为地球子午线北方向,也称为真北方向。
索佳GYPOX Ⅱ陀螺全站仪下部采用SET-1 系列测量机器人,具有“图像识别+电控马达”技术,利用陀螺仪内部相机识别陀螺摆的摆动幅度,自动控制测量机器人马达随着陀螺摆的移动方向转动,从而实现自动跟踪功能[5]。
2 陀螺全站仪地下导线检核流程
陀螺全站仪地下导线检核的流程是,在地面已知边上观测陀螺方位角,根据地面已知边坐标方位角,求仪器常数,在地下待测边根据仪器常数和子午线收敛角差值,计算得到地下未知边的坐标方位角[6]。
2.1 在地面测量已知边求仪器常数
由于陀螺全站仪在生产过程中产生的系统误差,以及搬运过程中对设备的扰动,陀螺仪的寻北方向与真北方向通常不重合(见图2),两者之间的差值称为仪器常数,一般用△表示。
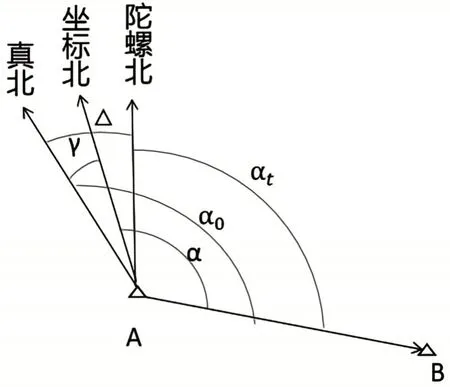
图2 三种北方向的关系
在地面已知边利用陀螺全站仪测量陀螺方位角αt,目的是通过已知边反算的坐标方位角α和测站点的子午线收敛角γ,求出真北方位角α0,再测量得到的陀螺方位角αt,计算出仪器常数Δ。
坐标北方向和真北方向之间的夹角称为子午线收敛角γ,子午线收敛角γ的正负可由安装仪器点的位置来确定,即在中央子午线以东为正,以西为负[7]。
将式(1)代入式(2)可得:
地面已知边求得仪器常数的过程可以表示为:
式(4)中:Δ上为地面测站陀螺仪的仪器常数;γ上为地面测站位置的子午线收敛角;α上为地面已知边坐标方位角;αt上为以地面测站陀螺仪北方向为零方向的陀螺仪方位角。
2.2 计算子午线收敛角差值
地面边测站所在位置的子午线收敛角γ上和地下待测边测站所在位置的γ下,都可以通过子午线收敛角计算公式计算求解,也可以不用分别求出地面和地下测站收敛角的值,只需要计算两者之间的差值[8]。
子午线收敛角差值计算公式为:
式(5)中:Δγ为子午线收敛角改正值;Y上和Y下分别为地面测站和地下测站横坐标(以km 为单位);R为地球半径;B为测站点纬度值;ρ为角度和弧度转换常数206265。
代入地球半径和ρ值后子午线收敛角差值公式可简化为:
2.3 计算地下待测边坐标方位角
在地下待测边上,根据陀螺方位角和子午线收敛角及仪器常数,可计算出地下待测边的坐标方位角。地下边的坐标方位角为:
一般认为仪器常数在测量过程中不会变化,因此Δ上=Δ下,将式(4)代入式(7)中可得:
3 案例应用
3.1 项目概况
此次定向位于武汉市轨道交通19 号线花山新城站。地面已知边采用地面精密导线控制点DX1916,GS1913,地下待测边为右线地下控制边YTL—YX10。项目测量队提供的控制点及导线坐标成果如表1 所示。在等边直伸导线中,当加测1个陀螺方位角时,k/n 的取值为0.67 左右,说明加测的位置大约位于导线全长的2/3 处为最佳[9]。为使加测陀螺边取得最佳效果,此次地下待测边位置选择为距离导线中点的1/3 处。

表1 地面边及地下边坐标
由坐标反算方位角可以得到,地上控制边坐标方位角α上=293°16′29.2″,地下待测边坐标方位角α下=2°14'40.0″。
3.2 测量过程与限差
根据规范:第一,地面已知边、地下定向边的陀螺方位角测量每次应该3 测回,测回间陀螺方位角较差应小于20″;第二,测前、测后各3 测回测定的陀螺仪常数平均值的较差应小于15″。
因此现场的测量过程为:第一,在地面控制边进行3 测回陀螺全站仪定向测量,标定仪器常数;第二,在地下待测边各进行4 测回定向测量;第三,以地面控制边测量3 测回定向测量结果检验仪器的稳定性和精度,并最终确定仪器常数,确保陀螺定向成果准确可靠。
3.3 测量数据
地面两次陀螺定向测量实测结果如表2、表3所示。
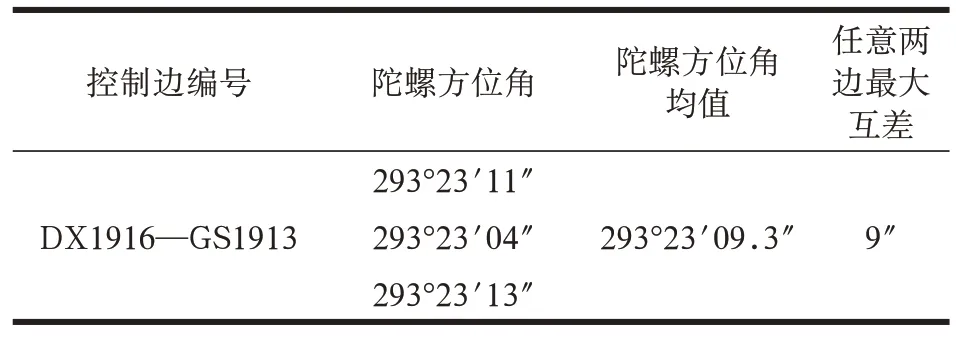
表2 第一次地上边陀螺定向结果

表3 第二次地上边陀螺定向结果
两次测量结果取平均值,可得地上边陀螺方位角αt上=293°23'08.8″。
地下待测边实测结果如表4 所示。

表4 地下边陀螺定向结果
右线地下边陀螺方位角αt下=21°20'55.4″。
根据式(7)计算得到右线子午线收敛角差值δ=0°0'20.9″。
根据式(8)计算得到右线地下边的坐标方位角为21°14′35.8″,与项目测量队提供的坐标反算方位角差值为4.2″,陀螺全站仪定向结果与项目测量队导线定向结果相差较小,结果表明项目测量队导线成果合格。
4 使用技巧
陀螺全站仪单次寻北时间需要10~15min,受环境影响较大,需要从陀螺仪寻北和全站仪测角两个过程提高精度。影响陀螺仪寻北误差的因素主要有环境振动、初始北方向是否准确和温度变化等。除了常规因素以外,影响全站仪测角误差精度的因素主要考虑是测量时间较长导致的温度变化。因此,测量过程中要注意以下四点。
第一,地面控制点最好选择在距离交通线路较远的位置,地下测量时,应要求盾构机停机避免振动。
第二,寻北过程中避免人员和车辆在周围走动,以免产生振动影响寻北精度。
第三,陀螺全站仪初始方向尽量找准真北方向,可以提高观测精度,也可以用第一次寻北的方向作为初始方向,避免寻北失败。
第四,地面测量时间最好选择无风的阴天或晚间,避免因阳光和温度变化较大引起测角误差。
5 结语
本文通过陀螺全站仪测定地下导线边方位角,检核武汉轨道交通19 号线花山新城站地下导线网精度符合要求,并总结了陀螺全站仪寻北技巧,为陀螺全站仪在城市轨道交通贯通测量中的推广应用奠定坚实的基础。
