在线式水肥一体机设计及其EC值稳定性研究
2023-11-16张东滨钟林忆谭康伟刘晓初
张东滨,钟林忆,3,谭康伟,刘晓初
(1.农业农村部华南现代农业智能装备重点实验室,广东 广州 510630;2.广州市健坤网络科技发展有限公司,广东 广州 510630;3.广东省现代农业装备研究所,广东 广州 510630;4.广州大学机械与电气工程学院,广东 广州 510006)
0 引言
无土栽培是相对于传统土壤种植的另一种栽培模式,早在上个世纪,荷兰、日本、美国等国家已经开始了无土栽培整套系统的研究和应用[1],在营养液供给稳定性方面,荷兰Priva、Hortimax 等品牌的水肥一体机表现优异,在我国高端智能生产温室大棚中占据不少的份额[2]。我国的水肥一体机研究起步较晚,但发展迅速。目前国内生产水肥一体机的厂家与日俱增,开发方式也各式各样,有采用PLC 作为控制器的[3],也有采用单片机作为控制器的[4];有采用文丘里作为吸肥动力的[5],也有采用蠕动泵作为吸肥动力的[6]。
与此同时,国内生产的水肥机质量也良莠不齐,特别是在配肥过程中对EC 值的稳定性控制方面表现较差[7],在面对无土栽培、水培或者科研实验等对EC 值稳定性要求严格的应用场景,大部分国产水肥一体机无法满足要求。袁洪波等[8]人设计与试验了温室水肥一体化营养液调控装备,采用增量式PID算法和改进Smith 预估器对营养液的制备过程进行控制,虽然一定程度上能够实现营养液的精确调控,但未能深入研究分析影响水肥一体机EC 值稳定性的因素。
本文设计了在线式水肥一体机系统,通过系统设计和试验分析,研究影响EC 值稳定性的因素,并通过系统改进实现EC 值的稳定,该设备样机目前应用于广东省农业技术推广中心。
1 在线式水肥一体机系统工作原理
本文设计的在线式水肥一体机系统工作原理如图1 所示[9-12],主要采用文丘里吸肥、混合水箱配肥的营养液配置方式,水泵6 启动后,混合水箱3内液位下降,清水通过水力浮球阀1 进入混合水箱,水箱中的营养液由水泵6 抽出后,大部分从水肥机出水口7 直接进入灌溉系统,其余的营养液通过EC/pH 传感器监测回路和文丘里吸肥器重新回到混合水箱内,同时,水流在经过文丘里吸肥器13 收缩口处时流速加快,根据伯努利原理,收缩口处产生负压,把部分母液从母液桶10 中一起吸入混合水箱3,实现配肥,母液带入的量由通道上的直通阀12 通过工控机8 利用PWM 脉冲宽度调制技术结合EC、pH 传感器采集的数据进行自动控制。在整个系统运行过程中,水泵是一直工作的,营养液的配置和灌溉是同时进行的。

图1 在线式水肥一体机系统工作原理
2 在线式水肥一体机系统设计
2.1 主要配件选型
设计水肥一体机混合水箱容积110 L,5 个吸肥通道,每个通道采用文丘里吸肥器吸肥,最大吸肥量500 L/H,每种作物采用“A 肥+B 肥+酸”的配方模式来配置营养液;混合水箱采用下液位开关和上液位浮球自动控制桶内液位;EC/pH 传感器采用4~20 mA 信号传输,安装于系统回路,用于监测营养液水质,双EC/pH 确保系统传感器的准确性;采用AC24V 高频脉冲直通阀控制每个调配过程母液的吸入量;采用RK3288 开发板作为水肥机控制器。
2.2 管路系统设计
由于在线式水肥一体机的工作原理决定了水肥的混合过程发生在水肥机的混合水箱内,在重力和水泵吸力的影响下,水肥在进入混合水箱交汇形成混合液后,自上而下相互融合流动,最终经水箱出水口处的水泵抽出。在这个过程中,无法确定桶内何处是已经混合均匀的营养液,如果EC/pH 传感器直接安装于桶内,容易受紊态水流和水中气泡影响,造成EC 值数值随机波动。所以把EC/pH 传感器安装在水泵下游的回水管路上,并在水泵出水管路上安装了排气阀,排出管道中残留的气泡。同时在水泵出口处安装压力表以及持压阀,用于保证水肥机上的文丘里吸肥器工作时有足够的压力。
2.3 配肥控制系统设计
在上文的管路系统设计中,EC/pH 的安装位置决定了水肥机在驱动直通阀配肥后,配置的结果在被EC/pH 检测到时并不是实时的,而是有一段滞后时间T,即EC/pH 检测到的当前水肥营养液,实际上是T 时长前水肥机驱动直通阀流入桶内的水肥。T 的大小和灌溉系统出水量以及水肥一体机系统设计有关,不同水肥机以及相同水肥机在不同的灌溉系统中,表现出的滞后时间也不尽相同,通常在7~20 s。
为了解决这个问题,本文在水肥一体机的配肥控制系统上引入了位置式PID 算法,见式(1)
式中:
e(t)——EC 值设定值和当前值的偏差;
u0——传入的PWM 脉冲时间;
u(t)——最终输出的脉冲时间。
由于水肥系统主要问题在于滞后性,所以重点采用比例P 和微分D 进行控制,P 用于调整步长,D是偏差值的斜率,即偏差的变化速度,通过检测偏差的变化速度,对系统传感器数据滞后做出反应,同时在系统微幅震动时加入积分抑制震动,配肥逻辑见图2。

图2 PID 控制配肥逻辑图
2.4 在线式水肥一体机装配集成
根据主要配件选型、管路系统设计、配肥控制系统设计,装配集成在线式水肥一体机。装配集成后的在线式水肥一体机系统外观如图3 所示。

图3 在线式水肥一体机系统
3 EC值稳定性测试与分析
在线式水肥一体机装配集成后的初次测试中,通过PID 整定,设置了PID 参数,实现了良好的配肥效果,以阀门“东北区#6”所控制区域为例,2022 年4 月11 日总计进行了10 次灌溉,EC 设定值为1.4 mS/cm,实测的平均EC 值为1.351 mS/cm,设定值和实测均值的偏差为0.05 mS/cm。具体每次灌溉时的EC 情况见表1。
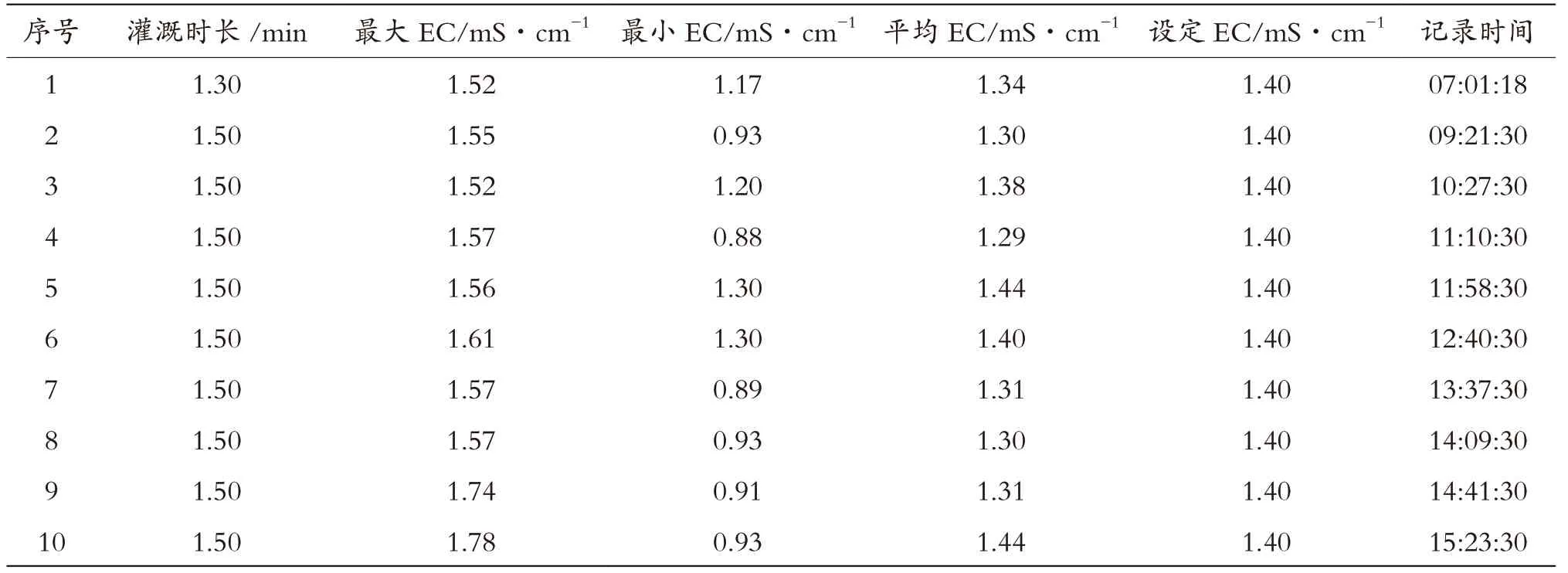
表1 东北区#6 2022年4月11日EC统计表
但随着系统的持续运行,在2022 年4 月25 日之后一个月的试运行阶段却发现了EC 值异常频繁的数据波动,数据的异常波动导致了PID 控制器由于读取到异常数据而做出错误的控制指令,进而导致水肥机配肥稳定性下降。由于在PID 算法的控制下,营养液的EC 值不可能出现瞬间的上下波动并瞬间复位的现象,故此现象属于非正常现象。为了分析此现象出现的原因,调取2022 年4月25 日至5 月24 日一个月内水肥机每个阀门工作时的水肥统计数据,获取阀门每次灌溉时的EC值变化范围,利用数据透视表对EC 最大值和最小值做筛选,统计灌溉时的EC 值数据跳动情况。在本次测试中,由于EC 设定值不超过2.5 mS/cm,在正常的PID 控制下EC 最大值不超过5 mS/cm,故在稳定状态下,当EC 值超过5 mS/cm,或者突然低于300 mS/cm 时,均视为异常跳动,但由于清水本身的EC 值也接近300 mS/cm,故低于300 mS/cm的异常跳动在数据统计中很难被剔除。通过统计每次灌溉过程中监测到的最大EC 值,发现在1 102 次灌溉 中,EC 值超过5 mS/cm 的概率 为31.76%,即跳动率为31.76%,实际上如果考虑EC 值往低处的跳动,跳动率应该大于31.76%,如表2 所示。
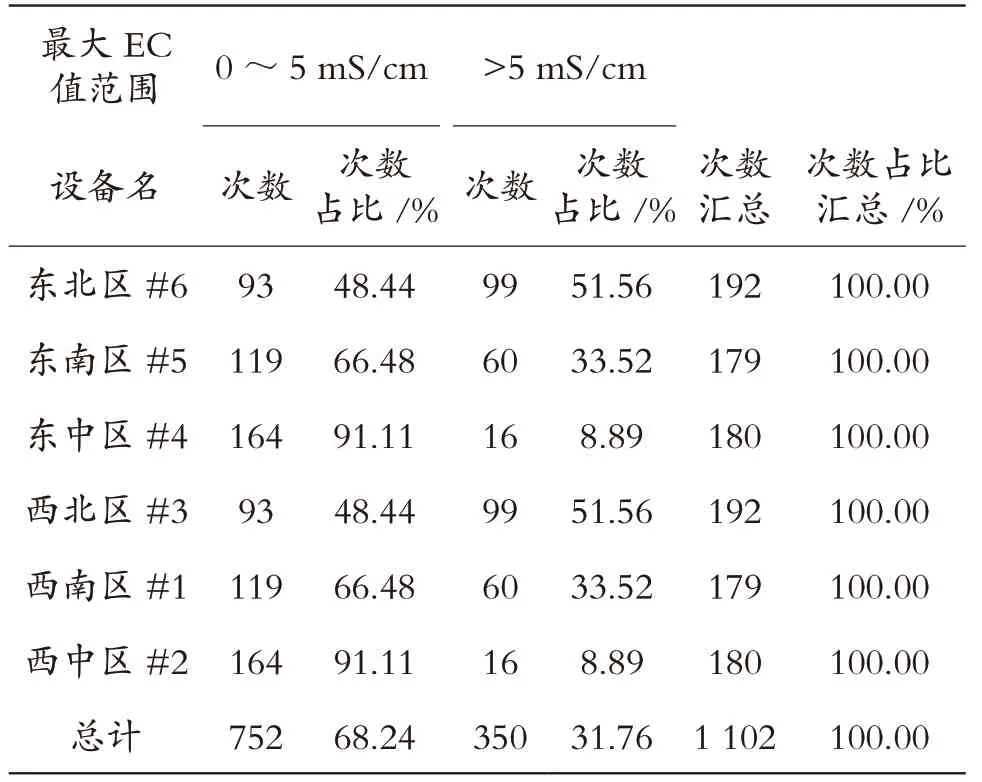
表2 各阀区最大EC值超过5 mS/cm的灌溉次数占比
为了进一步研究数据跳动发生的原因,分析了2022 年4 月25 日至2022 年5 月24 日这段时间内,每天的数据跳动情况,如图4 所示。
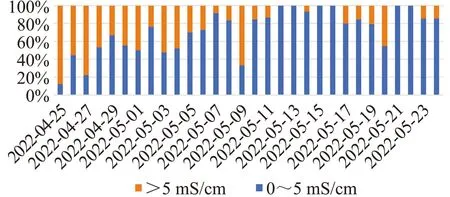
图4 每日最大EC 值超过5 mS/cm 的灌溉次数占比
从图4 可以发现EC 值异常跳动问题在4 月底5月初显得异常明显,通过后台警报数据(图5)以及调研得知,园区在此期间增加了生产活动导致用水需求变化,影响了水肥机的补水量,导致水肥机在此期间经常处于低液位状态,在补水过程中产生大量空气,还触发过液位报警。
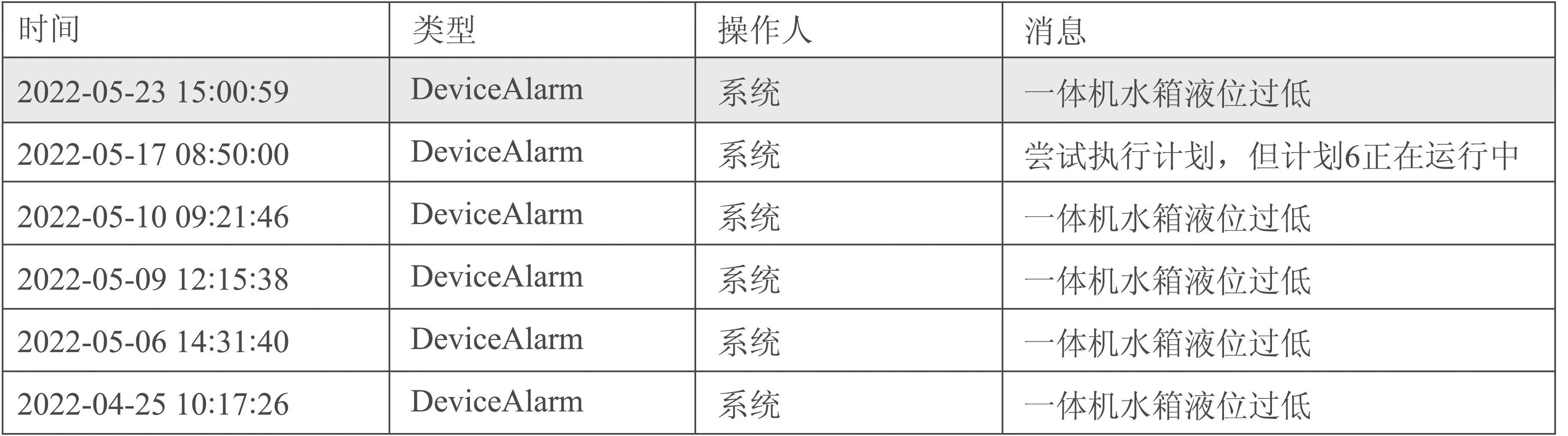
图5 后台警报数据
为了解决水肥机混合水箱在低液位情况下水中产生的气泡问题,改进了水肥机的进水口、进肥口以及出水口的设计。在原先的设计中,清水和母液在进入混合水箱时,是从上往下直接冲击液面的,这增加了混合效果,但也制造了大量的气泡,在水箱由于补水速度慢导致液位较低的情况下,冲击液面产生的气泡容易被水泵吸入,造成传感器数据跳动。修改后的设计在进水管和进肥管进入混合水箱后增加两个90°弯头,平滑了水肥进入混合水箱的过程,同时在出水口的设计中,增加了一个段引水管和一个出口朝下的45°弯头,这意味着降低了出水口的位置,减少吸入气泡的可能。
在对水肥一体机的混合水箱进行改造后,对水肥一体机生产运行过程中的配肥情况做了监测,每天的数据跳动情况如表3 和图6 所示(由于当时南区停止种植,所以南区没有灌溉施肥数据)。
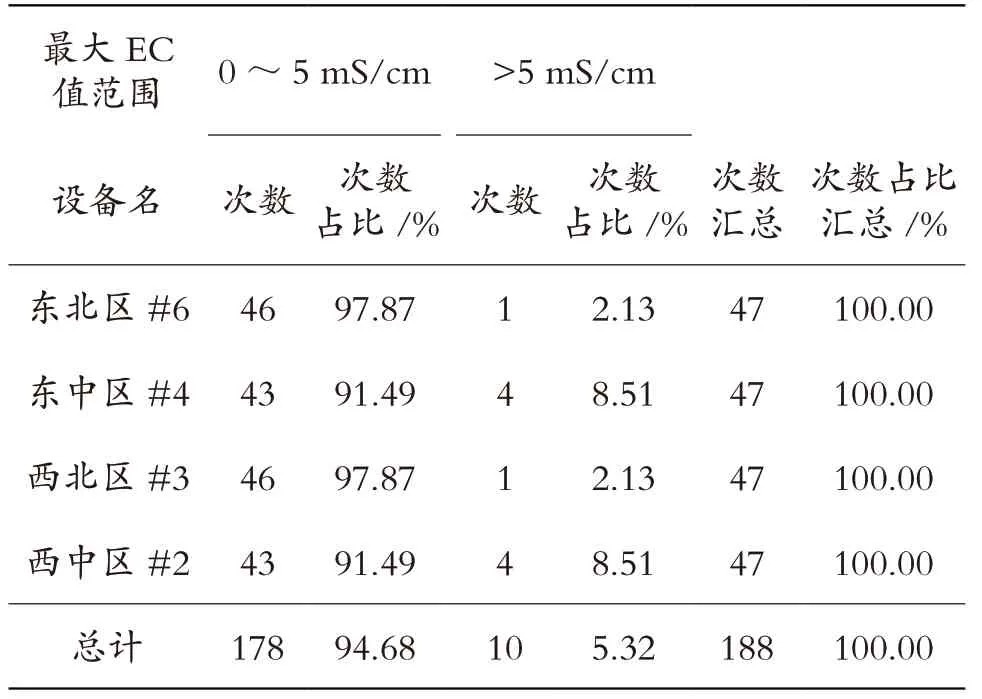
表3 各阀区最大EC值超过5 mS/cm的灌溉次数占比
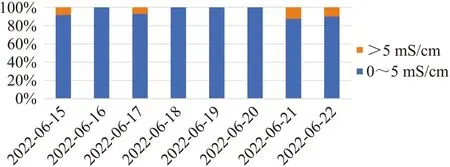
图6 每日最大EC 值超过5 mS/cm 的灌溉次数占比
从表3 和图6 的统计数据可以发现,改造后的系统灌溉178 次,EC 值超过5 mS/cm 的概率为5.32%,即跳动率为5.32%,远小于原先的31.76%,EC 值数据跳动情况明显减少,但无法消除,原因是外部园区用水导致的补水水压不稳定问题依然存在,但因气泡导致EC 值数据跳动的问题已经得到有效控制。最后统计了这段时间内的EC 均值以及设定值并进行对比,如表4 所示。

表4 EC均值和EC设定值各偏差范围的灌溉次数占比
在筛除了部分刚启动就缺水的情况以及没有添加配方的情况后,得出EC 均值和设定值差在0.1 mS/cm以内的次数占比为87.64%,介于0.1~0.2 mS/cm 之间的次数占比为8.99%,介于0.2~0.3 mS/cm 之间的次数占比为3.37%。其中北区均值和设定值差在0.1 mS/cm 以内的次数占比为100%,中区为74.42%,由表3 可知中区在灌溉时EC 跳动率为8.51%,高于北区2.13%,相对于北区出现了更多次由水压不稳导致的数据跳动,这也导致了中区的均值偏差相比北区更大一些。
4 影响EC值稳定性的因素总结
从以上的试验和分析表明,水肥一体机EC 值稳定性和以下几个因素有关。
1)PID 算法及参数整定。由于传感器数据的滞后性,如果仅采用条件控制,在读取到滞后的数据后,系统将做出错误的调整,导致EC 值最终处于上下波动状态。
2)水肥机管路系统的设计。管路系统影响水肥混合效果,同时影响混合箱内混合过程中气泡的产生数量,以及最终被吸入水泵的气泡数量,在混合的过程,应尽量在混合箱上层产生紊流以增加混合效果,可通过隔档物、进水进肥口设计进行改进,但同时需要减少混合过程产生的气泡,保证混合箱下层的流态稳定性。
3)水肥机上游水源的稳定性。不稳定的水源会导致补水量的随机变化,增加PID 调节的难度,同时导致混合箱内液面的高低变化,过低的液位会导致水箱上下层界限不分明,使得水泵吸入更多的气泡,影响整个系统的稳定。
5 结论
本文设计了一款在线式水肥一体机,并对其EC值稳定性进行了测试和分析,找到了影响EC 值稳定性的3 个因素:PID 算法、管路系统设计和供水水源的水压稳定性,并通过改进实现在线式水肥一体机EC 值的稳定。
