基于“无人机+Context Capture”技术构建三维实景智慧园区的实践研究
2023-11-16付帅任宁宁刘佳琦王廷刚付蓉马德明
付帅,任宁宁,刘佳琦,王廷刚,付蓉,马德明
兰州石化职业技术大学,甘肃兰州,730207
0 引言
三维实景模型构建在城市规划、建设、管理等各领域应用、需求广泛,因此,本文针对三维实景智慧园区构建,利用无人机和Context Capture内外业技术,解决三维实景构建过程中模型精度、纹理清晰度和数据采集最优实验数据等问题,实现高精度、高清晰度三维实景模型,构建可在线浏览的三维实景智慧园区服务平台,为省内外三维实景智慧园区建设提供技术支撑[1]。
1 研究价值
1.1 理论价值
通过无人机搭载高清数码五拼相机系统低空倾斜摄影测量技术+Context Capture软件平台技术构建三维实景智慧园区,形成最优飞行方案、飞行操作标准、飞行安全标准、三维实景模型及APP服务平台等成果,有以下理论价值:其一,能够为测绘行业相关项目提供理论依据和技术支撑;其二,能够为甘肃省兄弟院校建设智慧校园提供技术方案和技术支撑,对高校培养测绘领域技术技能型人才产生积极作用。
1.2 应用价值
课题通过无人机搭载高清数码五拼相机系统低空倾斜摄影测量技术+Context Capture软件平台技术构建三维实景智慧校园,构建技术团队,形成最优飞行方案、飞行操作、安全标准及三维实景智慧校园、APP服务平台等成果,有以下三方面应用价值:其一,方便教师、学生更直观地了解学校,提高学校的影响力和知名度;其二,促进地区智慧城市的发展,为地区三维实景园区建设提供技术指导;其三,能够完成省内兄弟院校相关项目,实现项目技术价值和学生的创业价值[2]。
2 测区状况
以兰州石化职业技术大学(新区校区)校园为实测三维建模区实验区。学校位于甘肃省兰州新区贺兰山大道北段1169号。学校占地面积18214.72m2,测区地物主要包括教学楼、宿舍、实训楼、道路、体育馆等建筑物。操场等地势相对平坦,飞行难度相对较低。
3 无人机及相机参数
使用飞马V1000为飞行设备,如图1所示,飞行参数见表1。
4 五镜头倾斜摄影无人机
采用超轻量的航测相机:2430万像素,APS-C画幅、35mm专用航空机械镜头,相机重量为207克。相机及其参数见图2、表2—6[3]。载荷模块数据见图4、表7、表8、表9;GNSS基准站参数见表10。
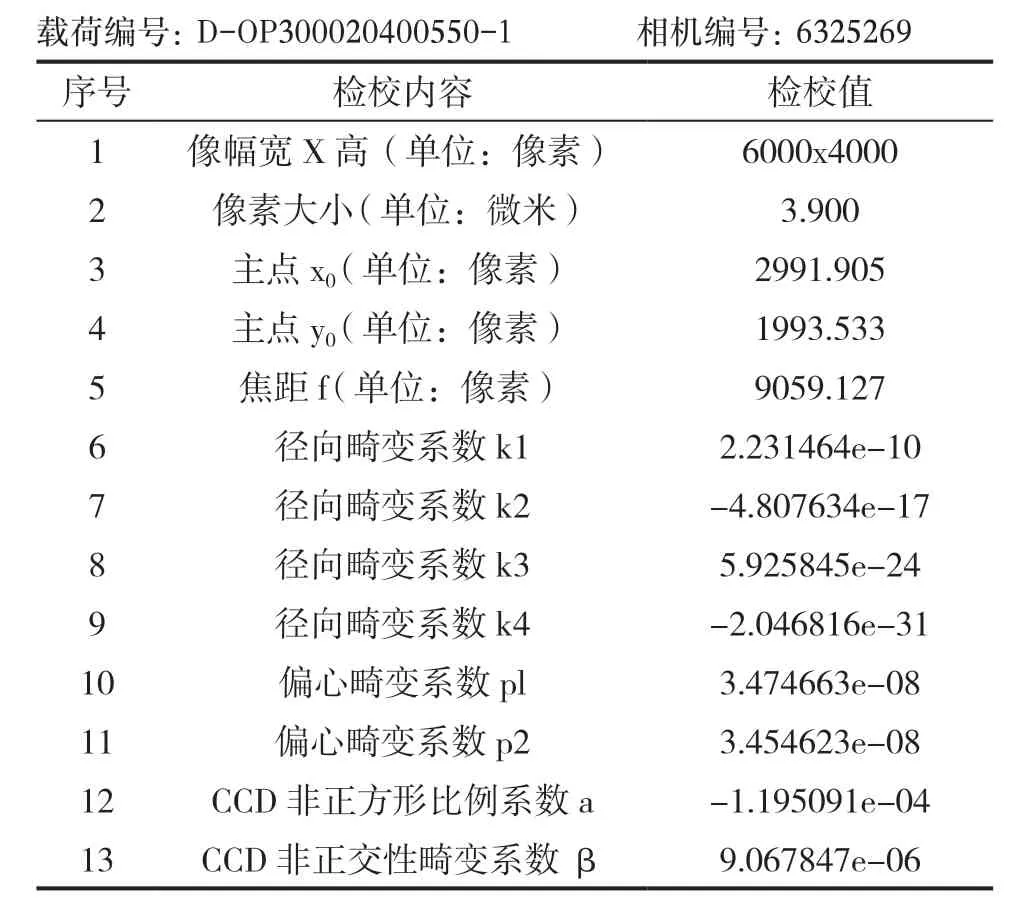
表2 相机参数
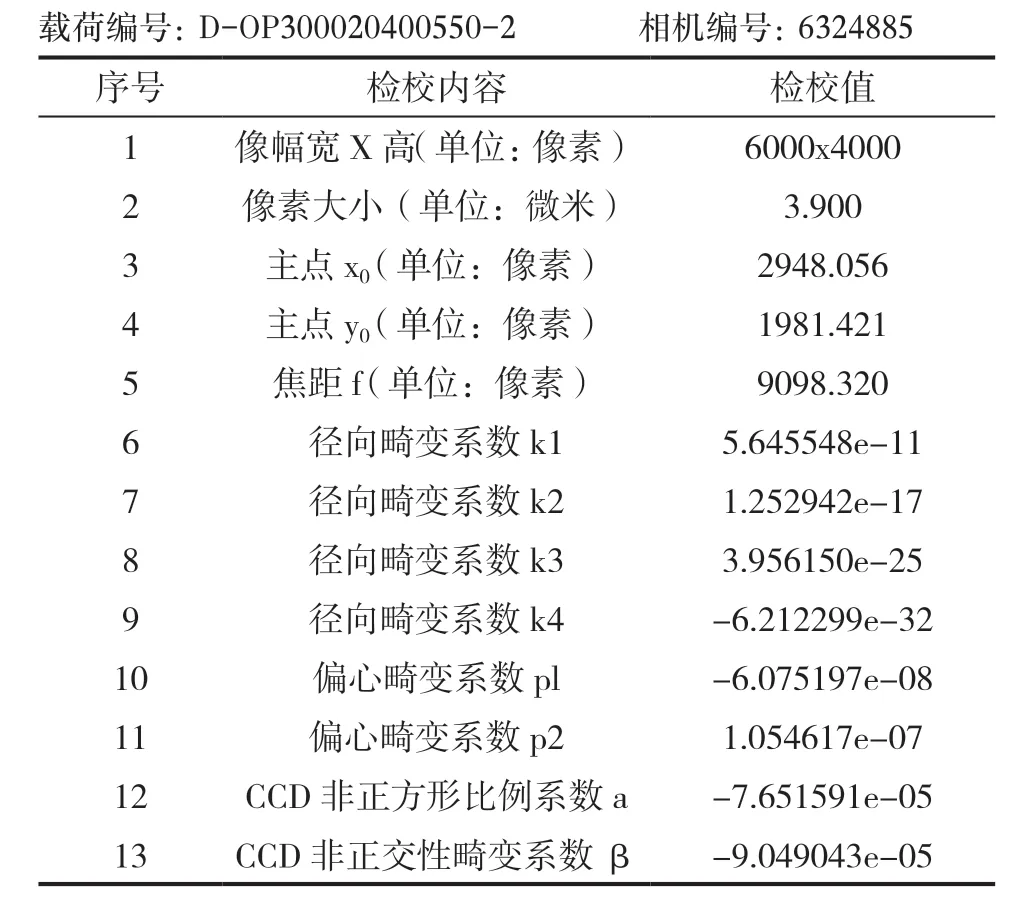
表3 相机参数
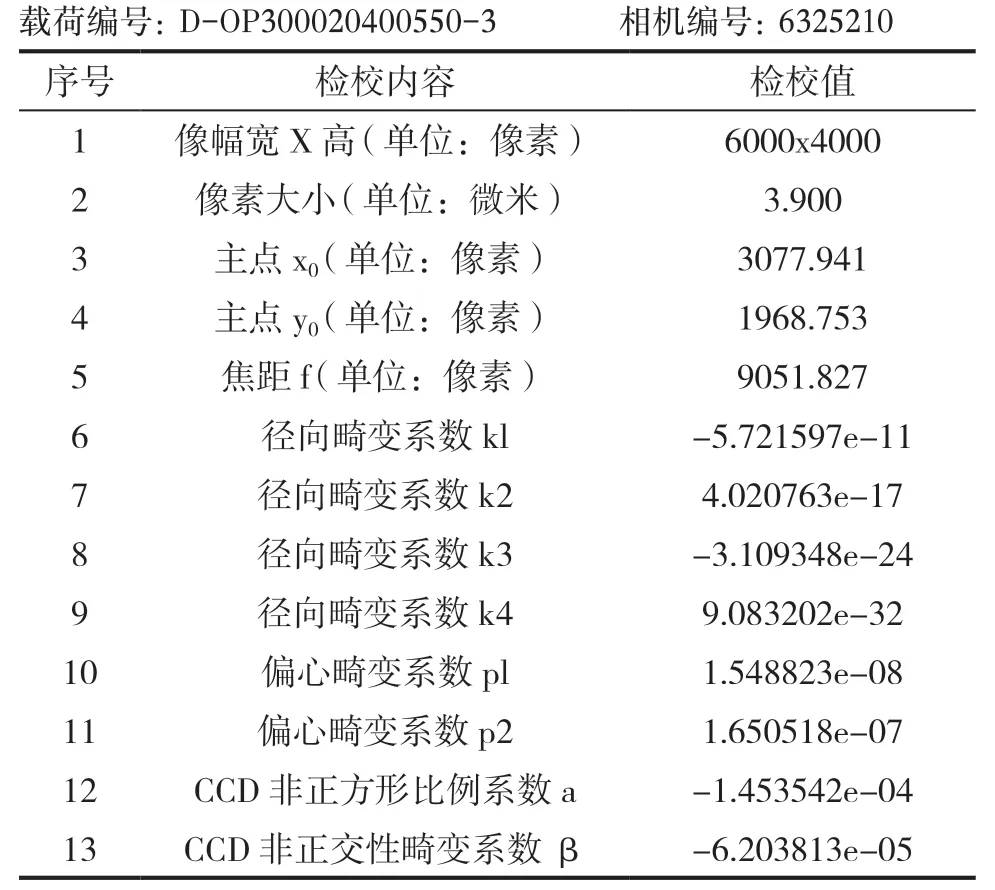
表4 相机参数
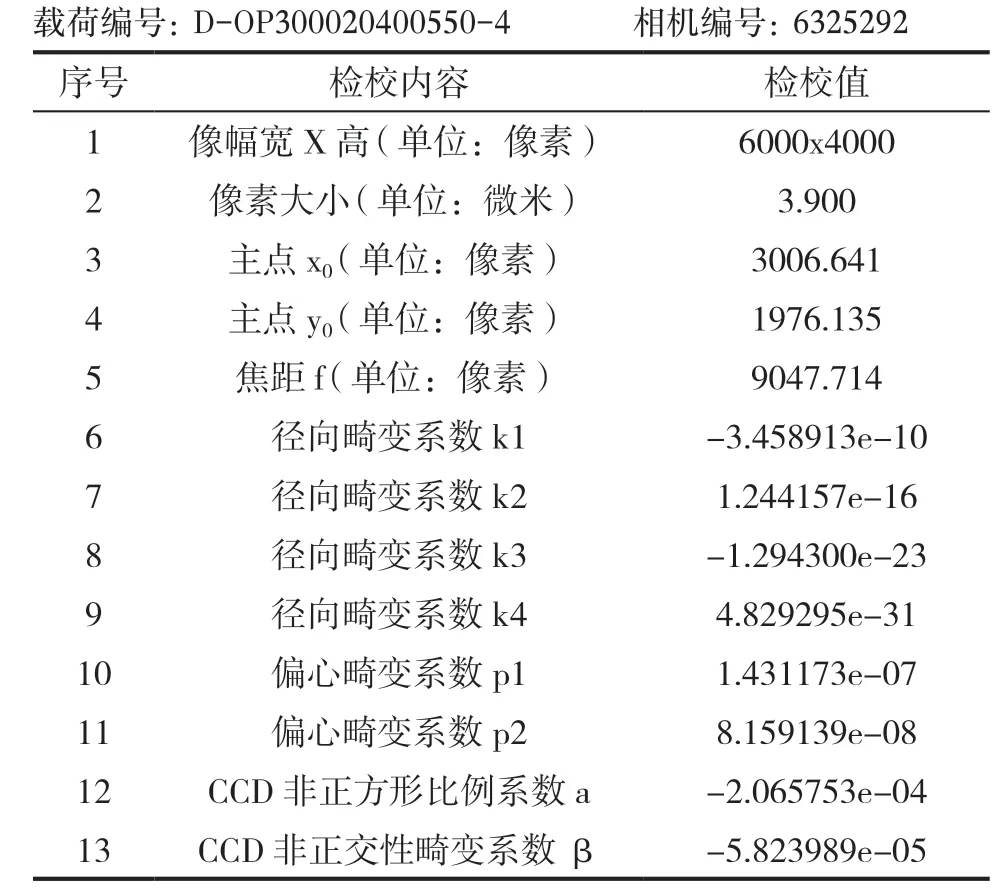
表5 相机参数
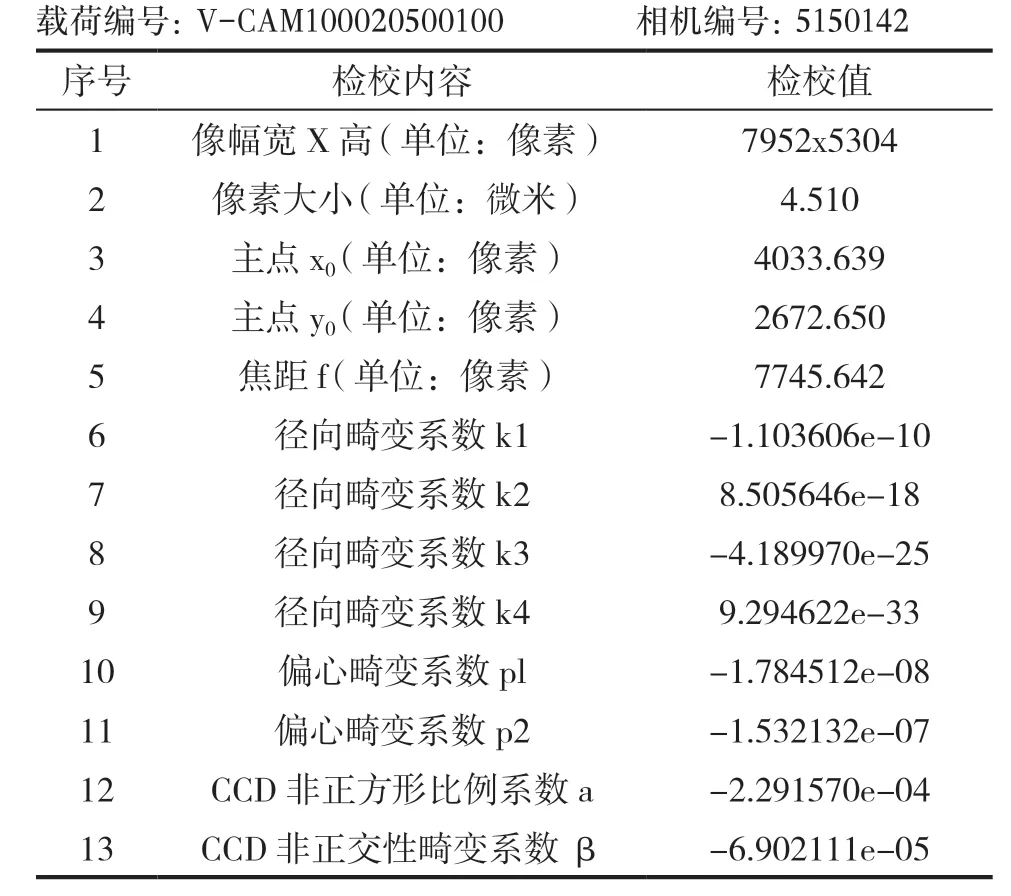
表6 相机参数
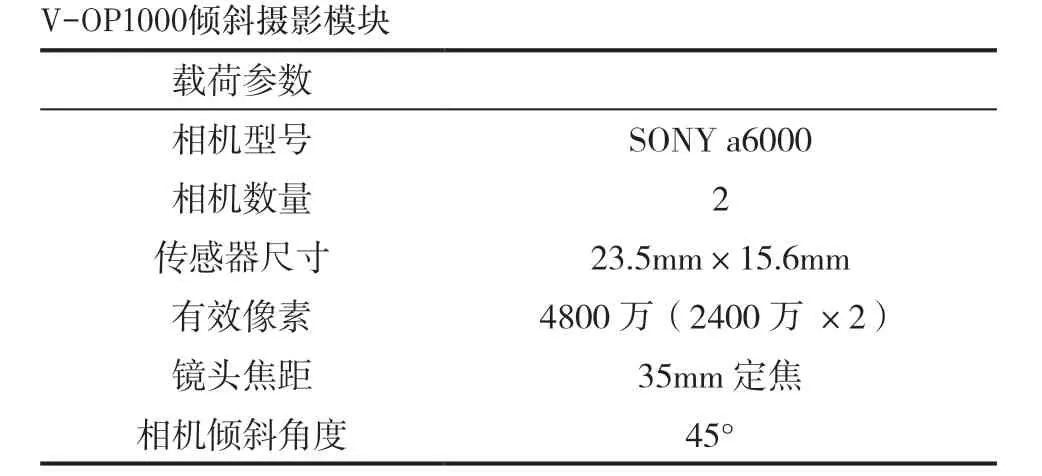
表7 载荷模块参数(倾斜摄影模块)
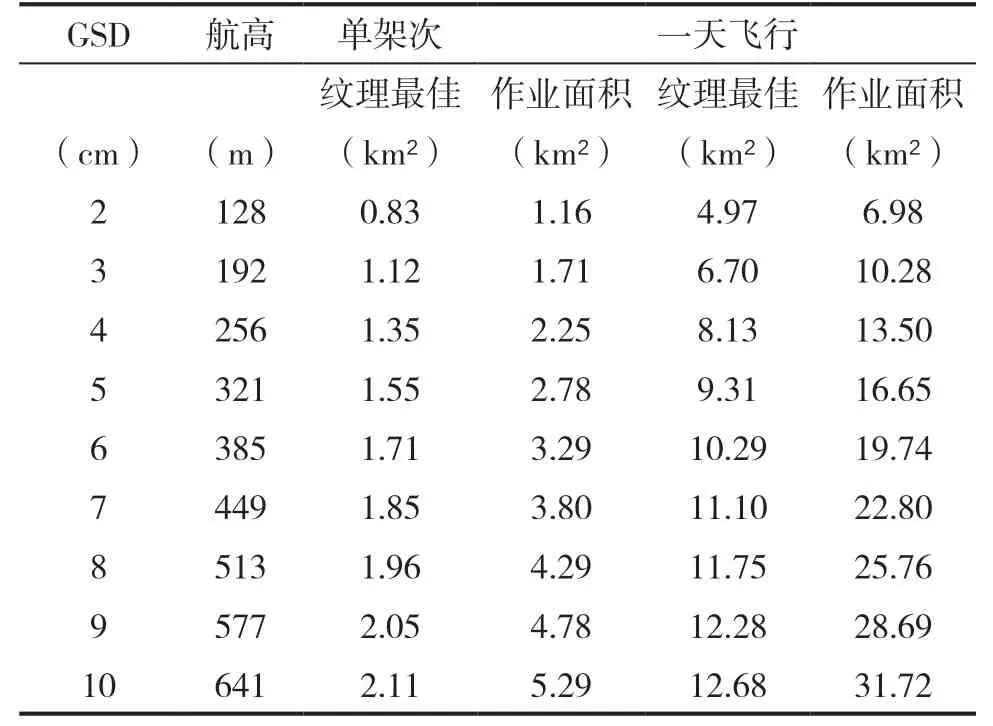
表8 工作效率表
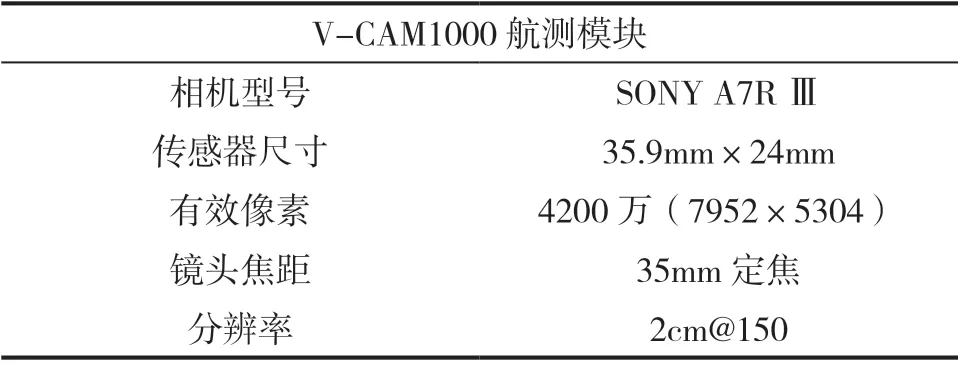
表9 载荷模块参数(航测模块)
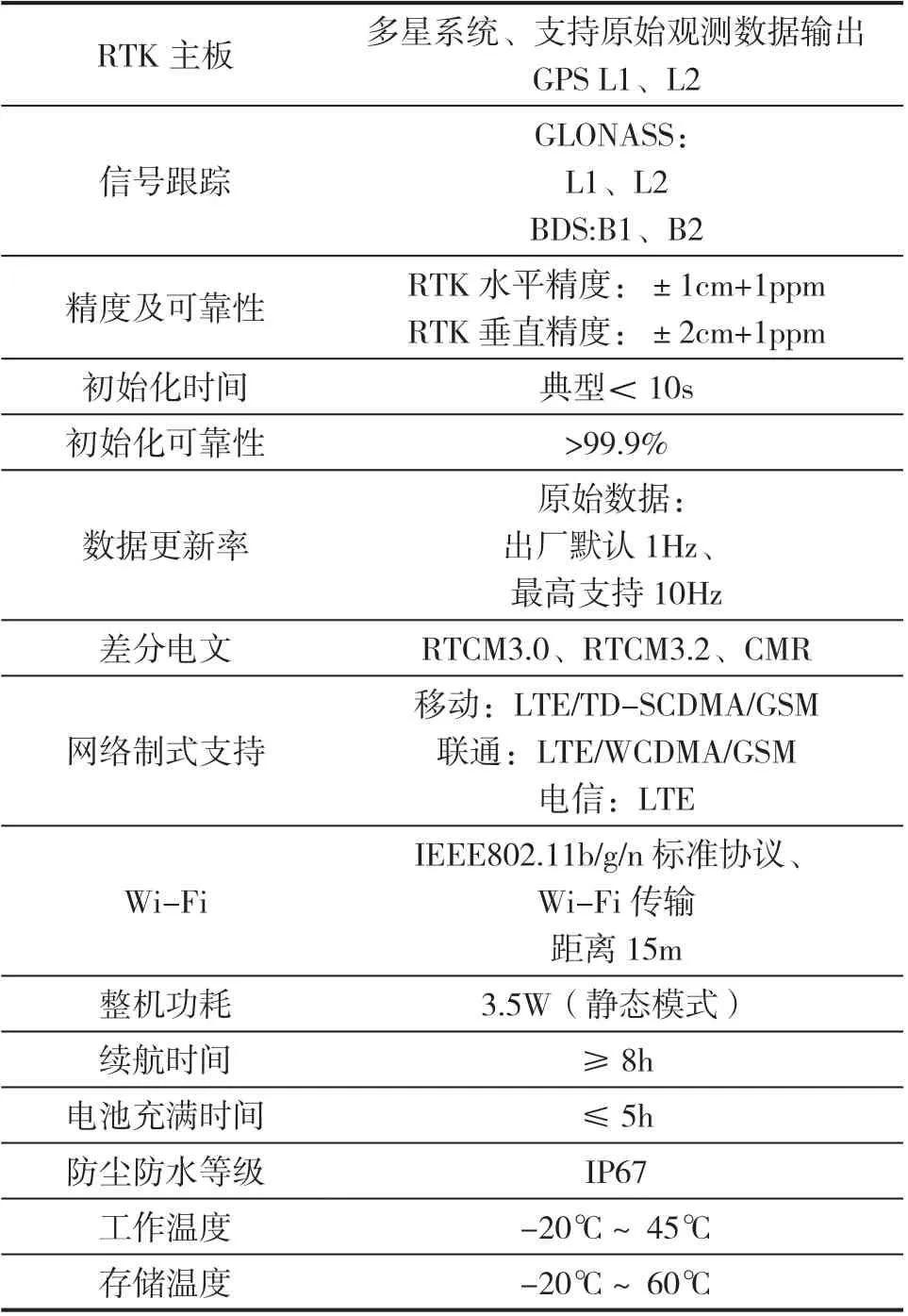
表10 GNSS 基准站

图2 相机
图3 坐标系相机影像图

图4 载荷模块
畸变模型:
引入畸变模型的共线条件方程式为:
其中,x、y为像方坐标系下的像点坐标,坐标系如图3所示;
5 倾斜航空摄影测量外业
5.1 外业测区状况
该项目所航测的范围大,区域地势较平坦,根据学校校园地形及建筑的分布情况,在满足要求和保证质量的情况下,对测区进行区域划分,然后再进行航测作业。测区分区情况如表11所示。

表11 具体分区情况
5.2 布设像控点
布设像控点主要是为了测量的精度,确定地面上所测物体在空间中的绝对位置。本项目像控点在北斗网的基础上基于GSCORS网络RTK技术方法。所采用的无人机为飞马V1000,为确保目标的精度,采用2430万像素1个控制点的选点间隔。
5.3 像控点的选点
像控点应在空旷地,目标影像清晰,便于判断和测量。采用涂漆式布设像控点,在地面上涂上大小为15×80cm的L形状的标志,测量时以L符号的内角为点坐标(图5、6)。

图5 控制点测量1

图6 控制点测量3
5.4 像控点的联测
像控点的坐标采集基于GSCORS的网络RTK作业方法。采集坐标时气泡要对中,并且每次的观测历元数不得少于5个,每次测量时都必须对中,确保地面坐标的准确性,提高控制点的精度。
6 构建三维实景智慧园区内外业实施步骤
6.1 外业实施过程
外业采集完成后,将数据传输至计算机进行预处理,对测量的数据进行复核、检查,首先对桩号里程、放样中线偏差进行复核,然后对测量的高程精度进行检查,如对于中线测量中桩高程精度,对超过中桩限差0.1m,即高程中误差≥0.05m的点进行重测或用全站仪进行补测量(见表12),在兰州石化职业技术大学(新区校区)校园内构建三维实景数字化校园实验基地,使用飞马V1000无人机搭载高分辨率五镜头相机系统,采用低空倾斜摄影测量技术,用逐级递增的方法进行无人机摄影数据采集,实验通过Context Capture软件平台建造基本无人工干预、相应数量的三维实景模型,根据三维实景模型的精度、清晰度、分辨率进行对比分析,得出最佳的飞行方案。

表12 控制测量点数据
6.2 实践方法
首先确定起降点位置,设定统一航线,以及符合质量规范的相控点。在测量规范内,以逐级递增的方法,设置航行飞行高度、重叠度,将每航次采集后的相控点坐标、相片、POS数据进行处理后,导入Context Capture软件平台后再次进行影像数据处理,以基本无人工干预的模型构造相应数量的三维实景模型,根据三维实景模型的精度、清晰度、分辨率等效果,研究最佳飞行方案,组成一套无人机倾斜摄影测量外业数据。同时,组建教师学生团队,根据飞行实验跟踪记录飞行过程中的操作步骤和实践经验,总结一套无人机倾斜摄影测量操作标准和航行安全标准[4]。
6.3 利用Context Capture软件排选出最佳影像数据
经过专业技术人员精细化处理,设计高精度、高清晰度、高分辨率的数字正射影像和三维实景模型。通过航飞实验研究总结出最佳的POS数据、相控点坐标、航拍相片,通过专业人员的数据处理,设计出符合测量规范的数字正射影像和三维实景模型[5]。
6.4 开发APP应用小程序
建设多功能的三维实景智慧校园APP服务平台,实现老师、学生在线浏览三维实景智慧校园。
7 技术思路
技术思路如图7所示。
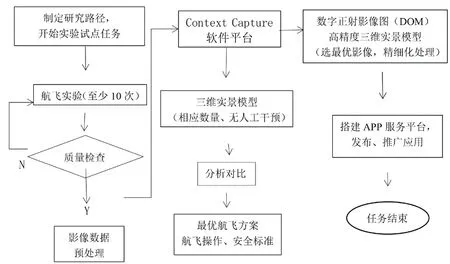
图7 技术思路
8 总结
本文采用飞马无人机V1000摄影测量技术,以基本无人工干预模式,设计符合测量规范的三维实景模型,选出最佳数据,利用Context Capture软件,构建数字正射影像图获取校园图像及应用数据,形成最优飞行方案、飞行操作、安全标准及三维实景智慧校园、APP服务平台等成果。
