并联四杆机构多维度电控调节系统研究
2023-11-16方扬涛宋岭林黄捷丛凯淇
方扬涛,宋岭林,黄捷,丛凯淇
燕山大学,河北秦皇岛,066004
0 引言
目前四杆机构主要应用于工业领域,如大型汽车制造、码垛、搬运[1]或作为大型生产设备的执行机构[2];在民用领域的应用较少,目前四杆机构已实现小型化、轻量化,未来在民用领域的应用也将会越来越多。小型四杆机构能够为福祉设备提供功能框架,能帮助乘坐者在狭小空间里自由移动。市面上提高座椅自由度的机构主要有实现升降功能的剪叉式机构、实现坐卧状态切换的多连杆机构[3]、并联四连杆行驶轮升降机构等[4],但都存在明显的短板。本文提供一种性能均衡、成本合理的设计方案。
近年来,轮椅的功能趋向多样化,国内市场有辅助站立和平躺功能的轮椅机构,但是轮椅乘坐者的运动空间仍然存在较大限制,其中高度制约对运动空间影响最大。本文设计的并联四杆机构多维度电控调节系统可以成为轮椅的运动空间拓展机构,不仅能实现座椅的上升下降,还能实现座椅的周向平移,使轮椅实现多维度运动。
1 系统构成
机械系统执行机构采用并联四杆机构,通过铰链与平台连接,由步进电机驱动液压杆。嵌入式系统主控硬件为单片机,利用姿态调整模块实现水平调节和重心自调,超声波模块实现安全限位,编码器实现电机测速,激光测距模块实现实时避障,并可利用开发板扩展接口实现其他功能。
2 机械设计
铰链四杆机构是一种典型的平面运动机构,由于其结构简单、承载能力强、运动曲线多样性等特点,使其在机械领域有着广泛应用[5]。本平台由四根电动推杆驱动,考虑到电动推杆与底板的体积干涉,采用铰链连接件搭建模型(图1)。
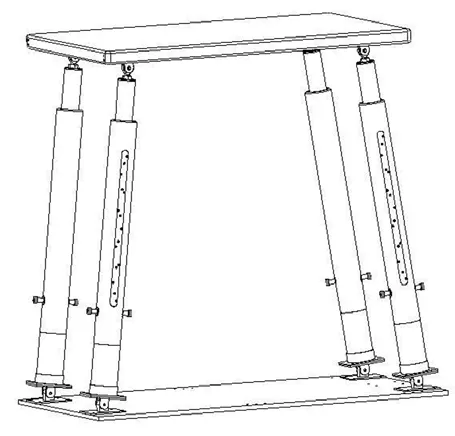
图1 铰链连接件搭建模型
铰链呈四边形放置,即铰链①、②、③、④活动面平行于铰链⑤、⑥、⑦、⑧活动面(图2)。模型在上述条件下能实现平台举升、下降、左倾、右倾。
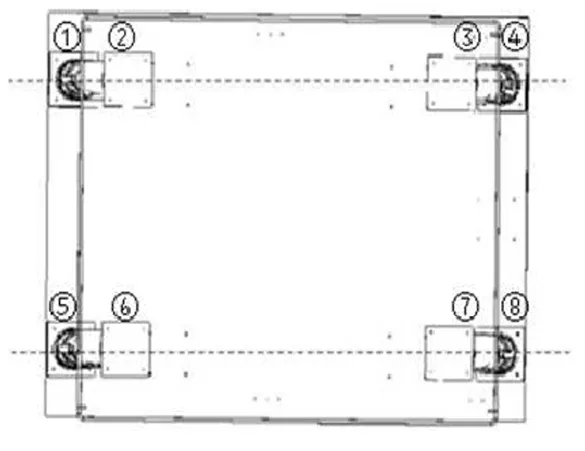
图2 铰链布置方式
本文设计的四杆机构机械平台是一种用于精密位置和运动控制的特殊机电一体化系统。驱动方式有线性驱动和旋转驱动,每对推杆(下肢和上肢)由单片机控制,以改变推杆的总长度。通过独立控制每根推杆的长度并使用称为正向和反向运动学的数学计算,可以精确地改变平台顶部中心的位置,平台使用液压或电动线性执行器,具有强度高、负重能力强、位置精度高等特点。
3 电控设计
3.1 主控硬件
采用STM32F103开发板作为四杆机构的主控硬件。该开发板能够满足对陀螺仪、电推杆等部件的控制要求,相比于F407开发板,还具有小巧轻便、经济实惠等优点。
3.2 平台姿态自动矫正
采用维特智能六轴加速度电子陀螺仪传感器姿态角度测量模块:JY61P。模块包含三轴陀螺仪、三轴加速度计。JY61P通过板载的USART全双工通用异步串行收发模块与PC进行通信,获得平台实时的各轴加速度、角速度、俯仰角等数据,系统采用PID反馈控制,通过前期实验对Kp、Ki、Kd三个参数进行手动选择,选取最佳参数让PID控制达到“稳准快”,可对各轴加速度、角速度等数据进行实时误差修正,使其尽量接近理想值,以此实现在崎岖地形前行或平台自由移动时依旧保持平台水平的功能。
3.3 创新型安全限位
采用HC-SR04超声波测距模块,测距范围最远可达6m。使用两个超声波测距模块对平台左右偏移的极限位置进行限制,防止人为误操作导致平台偏移量过大,重心偏移导致侧翻。考虑到各种外部因素对测距精度的干扰,需要在测距公式中引入修正项进行误差修正。空气温度是直接引起声波速度变化的修正项,若加进温度修正,可以得到较准确的声波速度,所引起的误差是声波传播途径中温度梯度,导致温度测量不准,引起温度修正不准,温度每变化1℃,引起声波速度变化约千分之二(0.002m/s),若测量100米距离引起的误差:温度误差1℃引起0.0006米,即使温度误差5℃也不影响工程测距精度(厘米级)[6]。
假设实际声速为V,温度为H,湿度为M,距离为D,Echo引脚脉冲持续时间为T,可以推导出实际距离公式如下:
在底盘上安装两个超声波测距模块,通过实验测试得到平台左右偏移的极限位置,再由平台的极限位置(此位置超声波模块恰好探测不到平台)确定两个超声波模块的安装位置。预先设定好阈值(可以是平台上升到最高处时与底盘之间的距离),当超声波模块检测到的距离小于阈值时,电机可以正常运转;反之,电机停转进行安全限位。当平台向左移时,右位的超声波模块进行工作(图3);反之,左位的超声波模块进行工作,两个超声波模块都能独立地控制电机的启停。
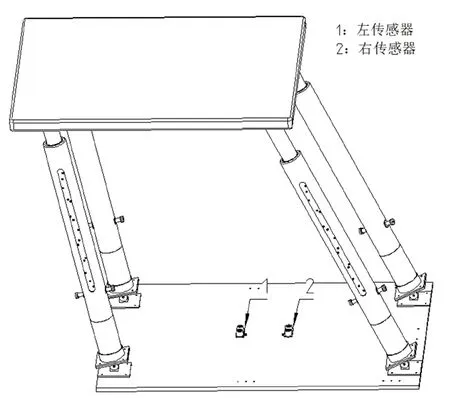
图3 传感器与平台的位置关系(平台左移)
3.4 四杆驱动电机测速
光电编码器通过联轴器与电机轴相连,由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,编码器的脉冲信号会通过对应的信号线发出,可以利用单片机对编码器信号引脚进行监控,通过计算每秒光电编码器输出脉冲的个数反映当前电动机的转速。
假设编码器单圈总脉冲数为C(常数),单个检测周期为T,一共检测到B个脉冲信号,编码器减速比为P,可通过以下公式计算电机转速:
将测量到的电机转速、转动圈数等数据通过PID控制系统与理想输出结果作比较,得到误差结果,再通过反馈环实时调整电机转速,逐渐逼近最优解。测量电机的转动角度和圈数后,通过实验可以得到电机圈数与电推杆伸长长度的对应关系,计算即可得到对应电推杆的伸长距离,以此实现对电推杆伸长量的无极调节。
3.5 激光测距自动避障
该四杆机构多维度电控调节系统将会运用在多自由度矢量调节轮椅上,通过四杆机构的配合运行,拓展轮椅座椅的活动空间,使轮椅乘坐者的运动空间达到正常人的水准。采用VL53L0X激光测距传感器,精确测量距离最远可达2米,测量速度快,可使用中断输出。由编码器进行电机测速,当轮椅速度高于5km/h时,激光测距传感器启动并实时监测前方障碍物的距离,当检测到障碍物的距离小于设定的上限阈值时,四轮驱动电机立刻停转。另设一个下限阈值用以防止手或其他物体挡住传感器导致电机意外停转,只有当测定的距离高于下限阈值、低于上限阈值时,电机才会收到停转信号。记录并处理从光脉冲发出到返回被接收所经历的时间,通过以下公式简单计算即可测定目标距离。D为轮椅与前方障碍物之间的距离,C为光速,T为单个脉冲持续时间。
4 应用案例
小型四杆机构可以作为轮椅的自由度拓展机构,进而大幅提升轮椅的易用性,图4为多自由度自动平衡新型轮椅。

图4 多自由度自动平衡新型轮椅
正常轮椅乘坐者受到高度限制,在运动空间上无法达到正常人的水平。本设计相较于传统轮椅机构提升了自由度,通过轮椅扶手上的摇杆和按钮,使用者可以实现对轮椅进行动态实时的矢量位置调整,一定程度上扩展了使用者的活动空间(图5)。轮椅在崎岖路面、坡道行进时,椅面的倾斜会带给乘坐者不适感,本设计加入平台姿态自动矫正系统来检测和自动调节座椅倾角,并结合电机独立驱动推杆的设计,实现轮椅重心的自动调整。

图5 三种状态下的运动空间范围
5 系统运行逻辑
系统运行整体逻辑如图6所示。
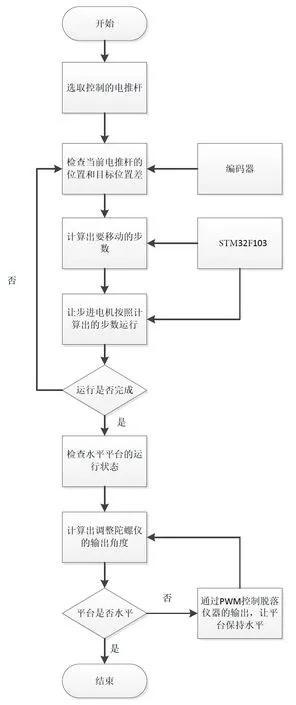
图6 系统运行整体逻辑
6 结论
通过论述并联四杆机构的新型机械设计、电控设计两个方面,提出一种小型化的四杆机构设计。该机构突破空间限制,提升功能性、智能性、安全性。本设计的主要功能是在保证应力正常的前提下,通过四杆机构提高设备运动空间自由度。智能化是今后机械设备发展的主要方向之一。本机构除实现多维度运动控制外,后期可联网进行功能升级,利用定位模块、蓝牙模块对机构运行状态实时监测,并且可以通过物联网实现信息实时传输。
