智能网联车路协同系统在煤矿井下的应用研究
2023-11-15马冠超
马冠超
(中煤陕西榆林大海则煤业有限公司,陕西 榆林 610800)
煤矿井下环境极为复杂,并且随着煤矿生产量的持续增加,井下车辆协同调度需求也在不断增长。在此背景下,如何在现有煤矿井下设施基础上,提高车辆协同调度效果已经成为当前关注的重点。针对当前需求,部分煤矿企业开始与高新技术企业达成合作,进而共同构建智能网联车路协同系统。结合当前实际情况来看,智能网联车路协同系统不仅可以提高煤矿生产智能化水平,实现智能化、自动化发展目标,还可以增强“车路—车车”信息交互、预警管控效果,提高煤矿井下生产安全性,具有较高的应用价值。
1 智能网联车路协同系统基本架构
本文所介绍的智能网联车路协同系统以MEC数据融合为核心,可构建“人—车—路—网”多维协同技术体系,并且集成有5G网联、边缘计算、高精度定位、车路协同、环境融合感知、高精度地图等设备和技术手段,最终形成集成有多源数据的MEC数据融合算法和数据支撑平台[1]。具体系统基本架构如图1所示。
(1)MEC为核心的计算单元。智能网联车路系统集成有以MEC为核心的计算单元。可通过在各煤矿井下路口布设MEC来实现井下路口多维交通状态、行车车辆状态信息的实时感知获取,进而为智能网联汽车提供更为精准可靠的数据信息支持。此外,将MEC作为系统最小控制单元,可有效实现路口、路段以及区域3个级别的信号精准控制,并满足系统信号控制数据的输入及计算性能相关要求。
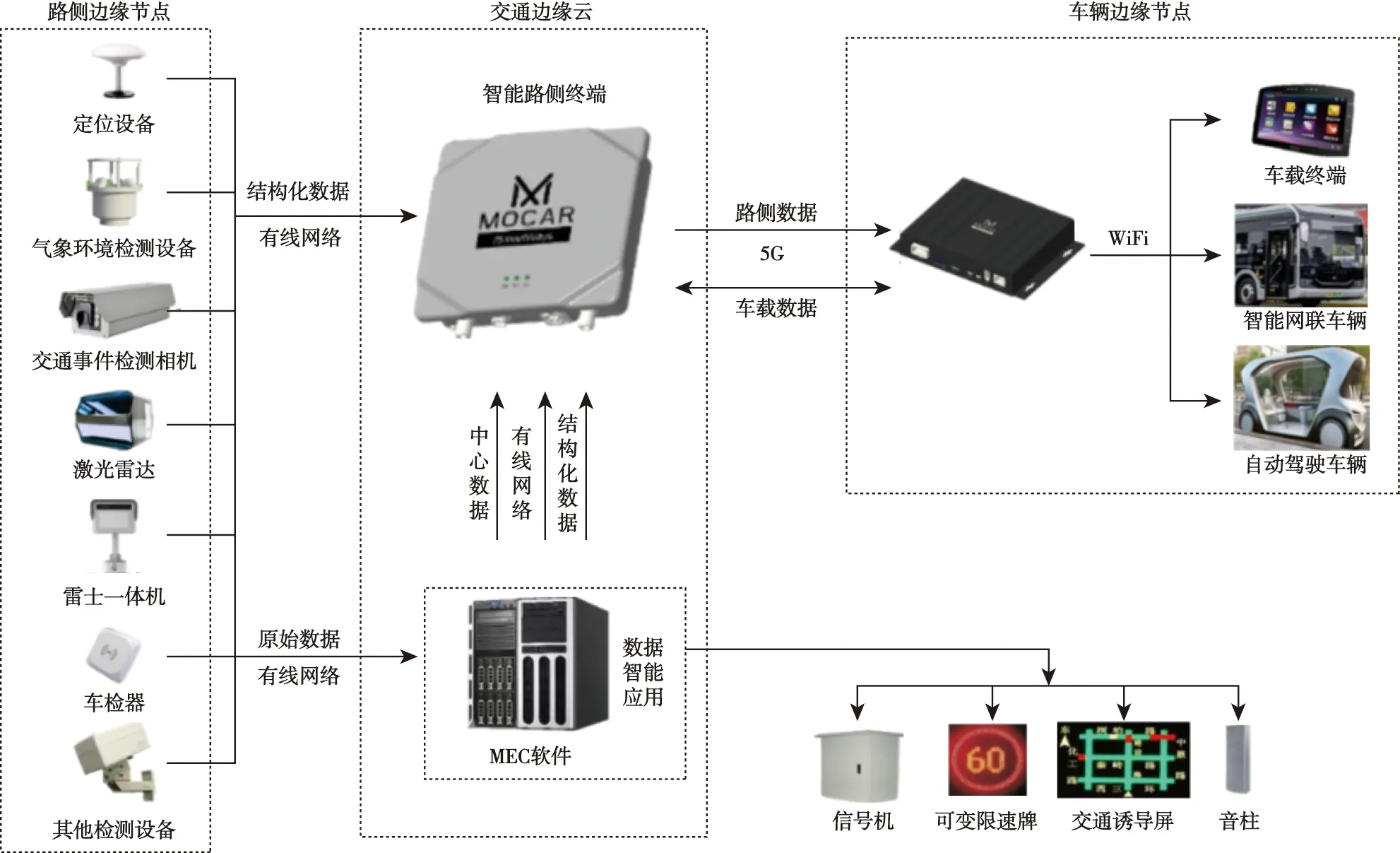
图1 智能网联车路协同系统基本架构Fig.1 Basic architecture of intelligent and connected vehicle-road collaborative system
(2)开放式MEC软件系统。智能网联车路系统中的MEC软件可在不同型号的MEC硬件产品上运行。系统税收MEC软件可实现硬件设备接入注册管理、交通控制应用、交通状态感知等效果[2],并且各软件应用之间可实现相互逻辑独立,并同时实现总体逻辑闭环,以便于MEC软件与系统其他软件之间的相互兼容以及功能独立。
(3)高可靠V2X通信系统。智能网联车路系统中集成MEC以后,可将路侧端工作压力较大的设备接入、设备管理、应用实施等功能转移给MEC实现,进而充分释放RSU负载性能,以此来保证RSU能够提供更多的资源实现V2X信息的传输与处理,降低系统延时和提高通信可靠性。
(4)低耦合的车载边缘系统。智能网联车路系统的车载端可通过CAN通信模块实现与车辆信息的实时交互效果,其中WiFi通信模块可为车辆提供高级辅助驾驶预警展示等功能,进一步提高车辆协调交互效果。同时,系统通过架构解耦方式实现车载边缘系统的有效拆分,形成V2X通信、CAN通信、WiFi通信三大模块,进而实现车辆信息获取、V2X信息转发、预警信息显示等多种功能[3]。
(5)可扩展的设备接入功能。智能网联车路系统的路侧边缘MEC与车载边缘节点之间采用物理层进行逻辑划分,并且系统具备大量的内存空间和计算性能,不仅可满足系统的基本运行需求,还配置有丰富的外设接口,可用于不同类型外界设备的接入及使用。
2 以MEC为核心的控制单元基本目标
MEC阶段集通信、计算、存储等多功能于一体,可为传统车路网络系统附加云计算、大数据、人工智能等诸多新型技术功能,进而为车辆调控以及自动驾驶提供决策和车载信息等联网服务。具体来说,以MEC为核心的控制单元基本目标如下。
(1)本地服务。MEC节点设置于系统网络边缘区域,可实现本地资源的MEC接入网络其他硬件设备的有效隔离。系统本地服务可有效提高系统安全性能,保障系统运行持续性好和稳定性。同时,MEC可与路侧及车载多源传感器实现数据采集和融合,并实现数据的动态化本地分析,以此来降低系统网络通信运行压力。
(2)邻近性。MEC节点布置位置靠近信息源,使得MEC边缘计算可更快速捕捉到关键信息。以煤矿井下视频转发场景为例,MEC可有效提高视频转发时的网络资源应用可能性,并增强视频传输质量,降低视频传输时延。常见的无线通信网络视频传输问题来自于TCP传输控制协议在网络环境变化中调整传输效率变化效率不足而引发的控制窗口指标拥堵等。而基于MEC节点的无线资源分析功能可有效提高TCP优化控制效果,避免数据传输中出现拥堵问题。
(3)低时延性。MEC的本地化功能促使其可实现用户侧数据处理,因而可有效降低数据通信时延,保障车辆与路侧设备之间数据传输时延要求,提高系统用户服务体验[4]。以煤矿井下自动驾驶智能车为例,其运行过程中有着较高的数据交互时延要求,所以将数据交互等业务部署的本地MEC上,将可为智能车通信提供更好的网络传输环境,并提供一定的在线辅助计算等功能。
(4)网络信息感知与开放。MEC可实现系统网络边缘状态的实时感知及分析,并通过标准化数据接口来实现网络信息的开放与管理。如煤矿井下无线网络数据以及车辆行进数据等。在具体应用中,煤矿井下车辆信息管理对位置信息的精准性要求相对较高,而通过MEC节点的位置信息开发功能可辅助车辆实现快速定位,提高车辆定位效率及效果。
(5)边缘服务。MEC边缘服务可通过主流标准化计算机设备来实现边缘服务平台构建,该平台可达成低成本快速维护和升级,并为本地功能提供云计算平台以及虚拟化边缘服务,最终促使本地功能实现高效、灵活部署。在整个系统中,MEC作为边缘云服务平台,可为煤矿井下车辆提供路况云分析,高精度地图服务等功能。
3 基于人工势场的紧急障碍避让协同决策模型
3.1 单车纵向控制模型
云端作为智能网联车路协同系统决策中心平台,其能够精准感知煤矿井下区域范围内的所有车辆速度、位置、加速度等信息,并根据感知数据来实现车辆加速度和换道操作进行精准控制。
在传统人工势场模型中,人工势场直接作用在车辆上,车辆加速度与人工势场梯度方向相反。但由于人工势场具有连续性分布特征,所以仅采用当前车辆所在位置的点势场的相反梯度方向实施车辆运动状态修正,将会在实际车辆控制过程中陷入模型局部极小问题中,进而引发无法获取最优驾驶状态或者无法克服车道势,车辆进入旁道等情况,不利于智能网联车路协同系统对于智能网联车的精准控制。具体情况如图2所示。
在人工势场中,影响车辆在沿道路方向上势场强度梯度变化的影响主要包括速度势和实体障碍势2大类,而x方向上的车道势和道路边界势则不存在变化,则:
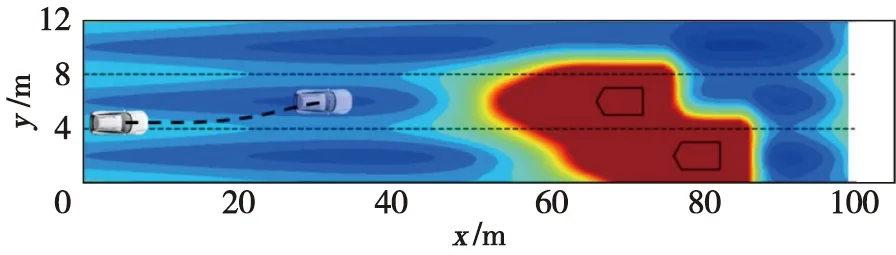
图2 人工势场局部极小问题示意Fig.2 Schematic diagram of local minimum problem of artificial potential field
(1)
式中,∂Ulane为车道势;∂Uside为道路边界势;∂x为x方向上的势。
某车辆在不更换道路情况下所在位置的势场强度(Utotal,Vm)为:

(2)
式中,Ulane,Vm为车辆Vm所在位置的车道势;Uside,Vm为车辆Vm所在位置的道路边界势;Uvel,Vm为车辆Vm所在位置的速度势;Uobst(Vi,Vm)为车辆Vi与车辆Vm之间引起的实体障碍势;Uobst(Ei,Vm) 为静止障碍Ei与车辆Vm之间引起的实体障碍势。
车辆换道过程中车辆换道完成度计算公式:
(3)
式中,c为换道完成度;y为换道过程中的车辆横向坐标;yci为车辆原车道中心线,W为车道宽度。
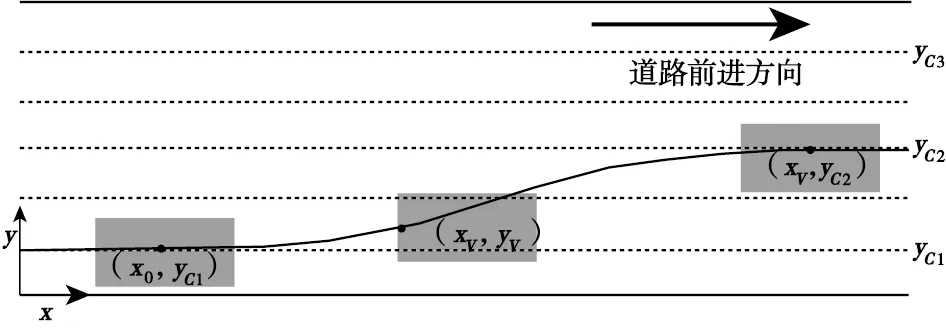
图3 智能网联车横向位移示意Fig.3 Lateral displacement diagram of intelligent and connected vehicle
在智能网联车从车道i换道值测量j过程中,先分别假设智能网联车所在位置为原车道或者换道后车道上,并且智能网联车的当前位置的纵坐标为xV,横坐标为智能网联车原车道和目标车道中心线坐标yci、ycj,分别计算智能网联车在2个车道位置的人工势场强度,在根据智能网联车换道完成情况,采用比例计算方式获取智能网联车点实际速度势与实体障碍势之间的强度和,具体计算表达式如下:
Utotal,Vm(x,y)=(1-c)Utotal,Vm(x,yci)+
cUtotal,Vm(x,ycj)
(4)
式中,c为智能网联车换道完成情况,Utotal,Vm(x,yci)为智能网联车在原车道上的总势场强度;Utotal,Vm(x,ycj)为智能网联车在目标车道上的总势场强度。
3.2 单车横向控制模型
单车横向控制模型面向的主要控制问题为智能网联车是否换道、换道时机、换道方向等换道决策问题。具体换道决策问题需要考虑换道动机、换道安全性两方面因素,以下将分别根据2方面内容进行单车横向控制分析。
(1)换道动机。换道动机的关注点在于智能网联车是否可通过换道来获取最优行进状态。在此过程中,云端控制平台根据智能网联车的前车道和相邻车道上的车辆行驶状态信息与障碍状态信息来判断车辆是否可以换道和具体换道方向。换道决策只面向车辆处于正常行驶状态下,所以可假设车辆行进时处于车道中心位置,即y=yci。具体换道动机如图4所示。
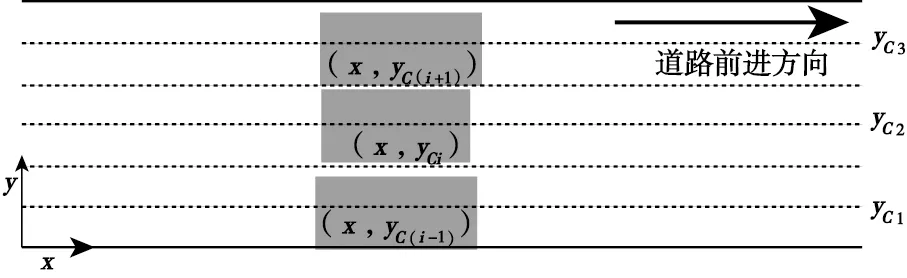
图4 智能网联车换道动机Fig.4 Lane changing motive of intelligent and connected vehicle
其中,满足换道动机时的表达式如下:
Uobst,Vm(x,yci) >Uobst,Vm(x,yci)+εU
(5)
式中,εU为限制频繁换道阈值;Uobst,Vm(x,yci)为原车道车道势场强度;Uobst,Vm(x,yci)目标车道车道势场强度。
(2)换道安全性。在确认换道动机后,需要综合考虑智能网联车换道后是否具备安全性。假设目标车道上纵向位置在目标车辆后方,并且与目标车辆之间处于安全距离,此时坐标点为(xVPF,yVPF),当前行进速度为vVPF,目标车辆坐标为(x,yci),行进速度为v。为保障车辆之间处于安全距离,避免车辆碰撞,则在智能网联车立即换道,并且在换道中以最大减速度adec,max刹车至车辆完全停止,目标车辆同时以最大减速度进行刹车,则两车之间不出现碰撞时的表达式如下:
(6)
式中,L为车辆长度。

图5 智能网联车换道安全性示意Fig.5 Safety diagram of lane changing for intelligent and connected vehicle
4 智能网联车路协同场景
智能网联车路协同系统运行中主要包括“车—路”协同和“车—车”协同2种运行场景。
4.1 “车—路”协同场景
智能网联车路协同系统“车—路”协同场景如图6所示。
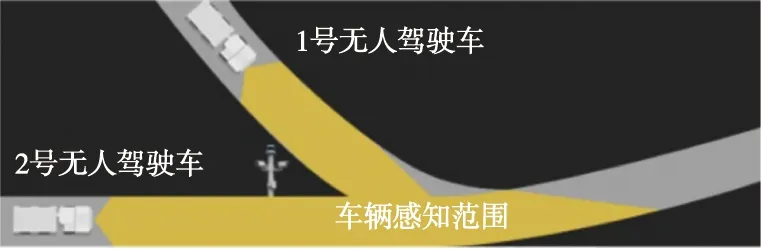
图6 “车—路”协同场景Fig.6 Vehicle-road cooperative scenario
“车—路”协同场景下的系统感知方式主要包括激光和通信2种,感知范围分别为170、300 m,针对煤矿井下路口等复杂应用场景,则需要部署多路口适配设备。具体应用中,系统可实现包括车辆、行人、石头、锥体在内的14类目标的视频监控及识别[5]。具体感知过程中可将感知精准性控制在10 cm×10 cm水平内,并在感知目标后及时通知车辆,并评估车辆的可通过性,针对难以通过路段则及时报警急停。
在路口交叉段,仅凭借车载端传感器设备将难以实现盲区障碍物的快速识别及安全应对,所以系统会在交叉段通过集成路侧雷达和图像感知设备共同实现障碍目标的有效感知,并合理计算节点完成测量运行模型的监控及碰撞预测分析,为设备的正常运行提供重要决策支持。另外,系统还会提供事故场景支持。
4.2 “车—车”协同场景
“车—车”协同场景下,即便是不依靠路侧系统的数据通信支持,仅凭借车辆之间的数据交互也可以实现前车故障、堵车等非正常原因停车问题的识别预警及信息传输。
本文介绍的智能网联车路协同系统设计架构已得到有效应用,不仅可提高车路协同控制效果,还能够有效节省智能车燃油消耗量,具体数据见表1。
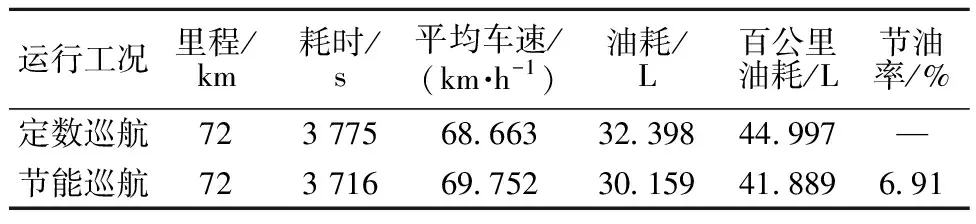
表1 智能网联车路协同系统节油效果Tab.1 Fuel saving effect of intelligent and connected vehicle-road cooperative system
5 结语
本文介绍一种可用于煤矿井下复杂环境车辆调控及自动驾驶的智能网联车路协同系统设计架构方案,设计主要包括单车纵向控制模型和单车横向控制模型2部分,适用场景为“车—路”协同场景、“车—车”协同场景,可为后续煤矿井下自动化、智能化建设提供设计架构方案参考,更有利于煤矿企业结合自身实际情况,构建更为完善的井下综合管理系统,保障煤矿生产的安全性,降低生产及控制成本,落实安全生产相关要求。
