智能消杀安保机器人设计与实现
2023-11-15索旭东廖子聪李冀川
索旭东,廖子聪,李冀川,康 晓
(智能移动机器人(中山)研究院,中山 528400)
2019 年底暴发的新型冠状病毒为疫情防控尤其是在人员密集场所的疫情防控工作带来了极大的压力与挑战,疫情防控要求的人力、物资巨大,同时长期工作在一线的工作人员也存在极大的接触传染风险,生命健康安全受到威胁。将智能移动机器人应用于危险、易感染的环境,可以提高工作人员的安全性,降低工作人员劳动强度。
消杀安保机器人是服务机器人的一种,主要涉及到自主导航、目标识别和紫外线等技术。随着智能技术的迅猛发展,消杀消毒机器人得到了广泛的应用,如办公楼、医院、学校、商场等。诸多国家对消杀安保机器人进行了深入研究,尤其在疫情期间,对消杀消毒机器人的需求更是与日俱增。目前,国内外在此行业投入大量资金和人力进行研发[1]。消杀安保机器人实物[2]如图1 所示。

图1 消杀安保机器人实物Fig.1 Disinfection and sterilization security robot
1 系统架构设计
采用分层控制的设计理念[3],将消杀安保机器人系统各个功能模块进行分层设计,分别为用户层、决策层、执行层以及设备层,各层次功能明确、灵活性高,其架构如图2 所示。

图2 系统架构图Fig.2 System architecture diagram
1.1 用户层
用户层主要包括安装在消杀安保机器人上的触摸屏以及遥控端,主要起到人机交互的作用。触摸屏给用户提供一种离线操作机器人的工作方式,通过与主控制器进行通信,稳定性高。软件设计包括指纹识别、消毒地点选择、密码解锁等功能,设计界面如图3 所示。
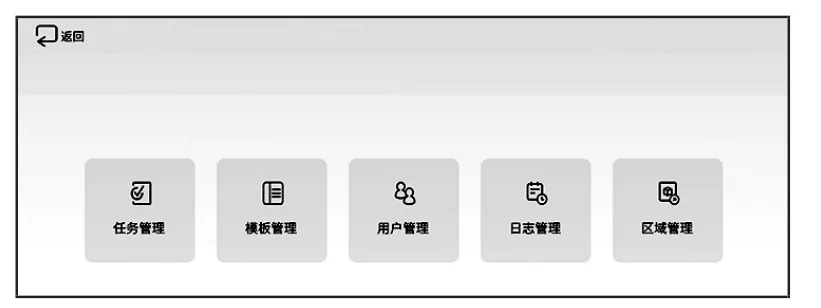
图3 操控屏界面设计Fig.3 Control screen interface design
1.2 决策层
决策层是系统的核心层,类似于人的大脑,主要承担机器人语音识别、定位与导航、路径规划等核心功能。硬件设备主控制器采用目前性能较为强劲且体积较小的mini 机(Intel NUC),安装ubuntu16.04系统环境。在该环境下,通过麦克风识别语音指令以及激光雷达采集环境信息,对这些信息进行融合处理,并根据处理结果,借助ROS 开源算法包实现机器人的即时定位与地图构建、路径规划以及导航避障等功能。决策层的系统框图如图4 所示。
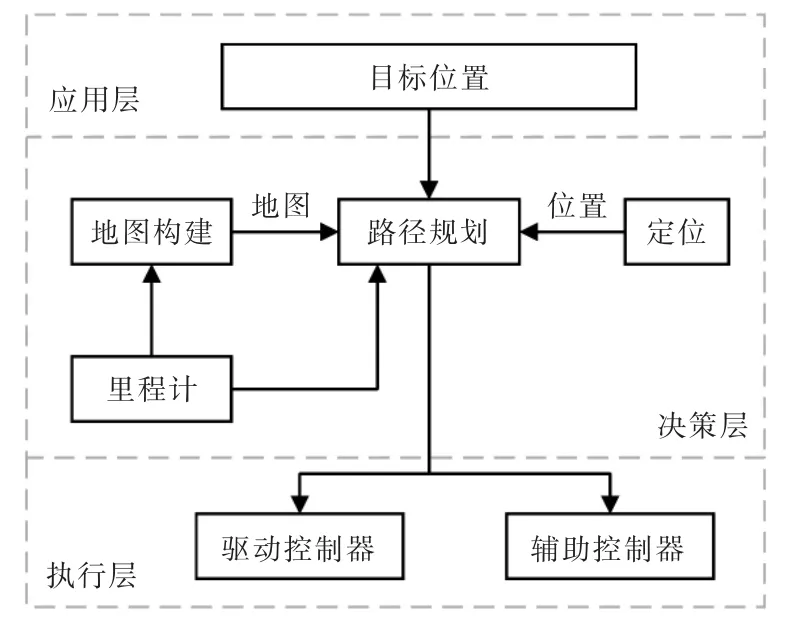
图4 决策层系统框架图Fig.4 Decision layer system framework diagram
1.3 执行层
执行层主要负责执行决策层发送过来的控制指令,控制电机以及消毒灯管等设备,主要包括电机控制器和辅助控制器两部分。电机控制器和辅助控制器都是基于STM32F103ZET6 处理器芯片开发,该芯片外设丰富、功耗低、成本低、性能稳定。执行层系统框图如图5 所示。
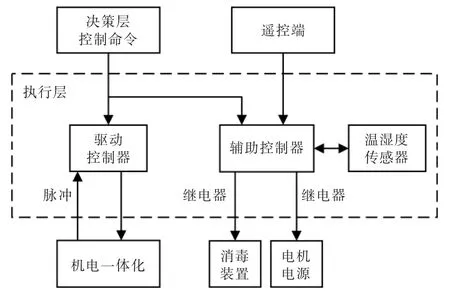
图5 执行层系统框架图Fig.5 Execution layer system framework diagram
1.4 设备层
智能消杀安保机器人采用全向底盘,全向的运动结构,使机器人具有更灵活的运动能力。直流电机与全向轮的连接采用高强度铝合金联轴器,能够保证承受足够的扭矩。系统采用锂电池作为电源,使用PWM 信号驱动电机,控制方式简单高效;选用性能优异的紫外线消毒灯管以及消毒喷雾进行高效杀菌消毒;采用USB 摄像头获取人脸信息以及高采样率、远测距的激光雷达采集环境二维地图信息用于激光SLAM 导航。
2 智能消杀安保机器人总体功能
智能消杀安保机器人能够取代人们完成消毒任务,降低工作强度,减少被感染的概率。需要对机器人的总体需求进行深入分析,分析工作环境的特点,调研工作人员要求,提炼机器人所需满足的基本要求,总结其关键参数,挖掘开发中的重点问题[4]。
智能消杀安保机器人功能需求来源于对消毒场景的分析,图6 所示为功能分析过程。

图6 智能消杀安保机器人功能分析Fig.6 Function analysis of intelligent disinfection and sterilization security robot
2.1 消毒功能
根据智能消杀安保机器人对消毒场景的分析结果,总结出消毒机器人在消毒方式及消毒设备方面的需求。所设计的消杀消毒机器人定位于服务类机器人,主要应用场景在医院、学校、写字楼等,机器人需在走廊、房间等位置进行消毒。
机器人消毒功能需求如下:①需对空气及物体表面进行消毒;②需对公共设施进行消毒,如门把手消毒;③消毒功能需支持有人环境。
消毒方式类别众多,各种消毒方式均有其利弊,且所适用的场景各有不同。紫外线消毒通过紫外线光照射进行消毒,应用十分广泛[5];过氧化氢消毒在医学领域应用较多,由于可以气化或雾化使用,因此使用起来十分方便;臭氧消毒由于会产生有害物质,因此多在具备通风条件的环境使用;液氯、次氯酸钠、二氧化氯消毒工作原理较为接近,需要与水产生水解反应生成可消毒物质,多用在污水处理及水殖业。
2.1.1 紫外线消毒
为提升机器人紫外线消毒的效率,紫外线消毒应包含2 个方面:①对机器人外部空气和物体表面进行消毒;②将外部空气吸进机器人内部进行循环风消毒。
为增大机器人紫外线消毒范围,需在结构上将机器人设计成上下两层,上层紫外灯可升降,升髙时,增大消毒范围;降低时,将外部空气吸进机器人内部,通过降下的紫外灯照射循环风进行消毒。
2.1.2 过氧化氢消毒
为使机器人支持在有人环境下也可进行消毒工作,机器人还需具备过氧化氢消毒功能。通常将过氧化氢消毒剂雾化喷洒到空气和物体表面进行消毒,使用雾化装置及液压装置,将过氧化氢消毒剂从液箱中抽到上层消毒设备,借助雾化装置使其转化成干雾并喷洒到空气中,增大消毒范围。
2.2 移动功能分析
为使机器人可以自主完成消毒工作,机器人还应具备在室内自主移动的功能,主要体现在以下几个方面:①能够循迹移动;②移动过程中能够自动进行偏差校正;③能够在指定位置停下并保证一定定位精度;④在消毒剂或电量不够时能自动回桩进行补给。
2.2.1 自主导航功能
为提升智能消杀安保机器人的智能化程度,所设计的AMR 应具备自主导航的功能,以使其可在工作区域内自主移动,在各待消毒区域之间稳定巡航和工作。对比各种导航方式,电磁导航灵活性较差,不便于后期更改路径;磁条导航铺设轨迹不易保持完整,且磁感应会被外界干扰;惯性导航稳定性不高,且需要校正。因此最终选择激光SLAM 导航[6]。
2.2.2 自主校正功能
根据实际现场的要求,AMR 须按照指定轨迹行走,且具有自主校正的能力,以保证侧向偏差、角度偏差在合理范围内,同时AMR 在导航和校正过程中应尽量平稳,不能有较大振动和抖动。决定AMR运行性能的指标和参数有多个,需结合实践综合考虑各个指标和参数的影响。
2.2.3 自主定位功能
为使智能消杀安保机器人能够在指定待消毒区域进行消毒工作,AMR 应具备定位的功能。这需要设计伺服反馈控制回路,增强机器人与配备传感器之间的信息交互功能。考虑到所设计的消杀安保机器人是在指定点对一片待消毒区域进行消毒,同时根据实际工作环境特点,机器人定位精度只需求在±25 mm 之内。
2.2.4 自主回桩充电加液功能
为提升消杀安保机器人的智能化程度,方便用户使用,机器人还应具备自主回桩充电和加液的功能。具体需要设计以下3 个功能:①机器人电源电量的实时反馈功能,使机器人能够在电量阈值范围回桩;②对机器人的消毒剂容量实时监测功能,当消毒剂消耗殆尽时通过信息交互控制机器人回桩加液;③自主回桩功能,机器人需要记忆桩点位置信息和行走轨迹信息,以便在任一节点回桩。
3 消杀安保机器人运动学研究
假设消杀消毒机器人工作时在平整的地面上移动,定义地面坐标系为XOY,机器人坐标系为xoy,如图7 所示。
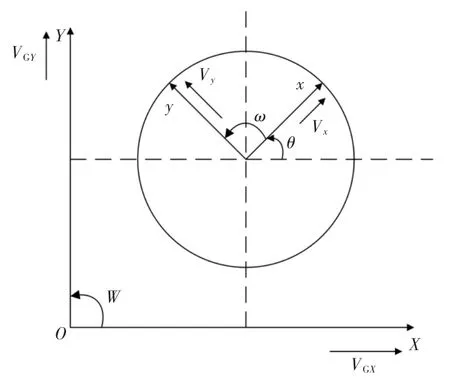
图7 运动坐标系Fig.7 Moving coordinate system
两坐标系旋转角度为θ,地面坐标系X 轴方向的速度为VGX,Y 轴方向的速度为VGY,角速度为W;机器人坐标系x 轴方向速度为Vx,y 轴方向速度为Vy,角速度为ω。坐标系速度转换公式如下:
假设机器人底盘全向轮轮轴之间的角度为绝对的120°,全向轮C 的轴线和y 轴重合,VA、VB、VC分别为3 个全向轮的转速,3 个全向轮之间的相切圆半径为r,和是机器人坐标系x 轴速度Vx分解到全向轮A 和全向轮B 方向上的分量,和是机器人坐标系y 轴速度Vy分解到全向轮A 和全向轮B 方向上的分量,如图8 所示。
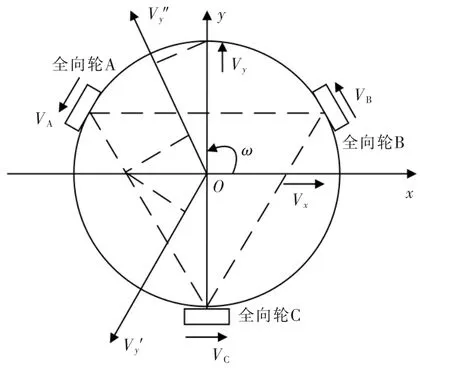
图8 速度计算分解图Fig.8 Speed calculation breakdown diagram
通过计算可以得到全向轮A 的速度公式:
因为:
所以可得机器人坐标系下全向轮A 的速度为
同理,可得机器人坐标系下全向轮B 和全向轮C 的速度分别为
由此,可得3 个全向轮的速度变换矩阵:
进行联合,得到机器人的一般运动学方程:
4 路径规划与导航
4.1 ROS 简介
ROS 是运行在主操作系统上的“软件模块”,是一种分布式模块化的开源软件框架,实现机器人底层硬件抽象化,为机器人的开发提供接口。
4.2 地图构建
利用ROS 中的Gmapping 软件包实现地图构建,如图9 所示。其中椭圆形表示各功能节点,主要包括Gmapping 节点、激光雷达节点、手柄控制节点、机器人底盘控制节点和地图服务节点;矩形方框表示主题,主题指向节点则表示该节点订阅了相应的消息,节点指向主题表示该主题发布了相应的消息。

图9 Gmapping 建图节点Fig.9 Gmapping mapping node
4.3 导航规划
路径规划单元通过对地图单元提供的地图数据与定位单元的定位数据实现全局地图路径规划,通过环境感知单元提供的环境数据实时判断周围障碍物实现局部地图路径规划,实现自主导航、自主避障;也通过环境感知单元提供的环境数据判断充电桩的位置,实现停靠充电桩路径规划,实现自主充电,其工作流程如图10 所示。
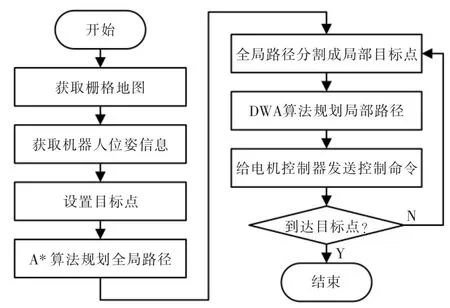
图10 导航规划流程Fig.10 Navigation planning flow chart
5 结语
本文主要介绍了融合紫外线光线和消毒液雾化2 种方式的消杀安保机器人,基于模块化分层的设计,将人机交互系统、决策系统、自主运动系统和消杀系统进行独立设计实现,使得机器人的研发过程更高效,测试和维护过程更方便快捷。对整个消杀安保机器人硬件组成、软件运行逻辑、人机交互流程进行实现,最终实现消杀安保机器人可实际应用于疫情防控重点场景,减少疫情防控人员感染病毒风险。