基于RobotStudio的搬运机器人虚拟仿真分析*
2023-11-13高志远晏芙蓉李家学李耀贵
高志远,晏芙蓉,李家学,李耀贵,黎 川
(1.广东理工学院智能制造学院,广东肇庆 526100;2.武汉光谷职业学院智能制造学院,武汉 430077)
0 引言
随着工业自动化的不断深入发展,搬运机器人作为工业自动化的重要组成部分之一,需求量也在与日俱增,并已广泛应用于工业的生产和制造中[1-3]。而工业机器人虚拟仿真具有缩短生产工期、避免返工、节省成本等优点。RobotStudio 作为工业机器人虚拟仿真平台之一,具有界面友好、编辑方便、功能丰富等优点,同时其在机器人应用行业中的地位也更加突出。
由于工业机器人在实际应用中,主要采用以示教的方式进行现场编程,会存以下问题:在线示教编程过程繁琐且效率低;目测对机器人的示教操作难以在复杂路径获得准确位置;也无法应对外界信息干扰作出正确的决策[4-5]。将仿真软件RobotStudio与工业机器人的有机结合,通过采用离线编程的方式有效缩短了机器人停机时间,在对新的任务进行编程时,机器人仍可在工业生产线上继续正常运行,机器人的程序也可以随时进行调试优化,有效改善了编程者的编程环境,使其远离危险复杂的工作环境。
本文利用三维建模软件SolidWorks 建立机器人搬运虚拟仿真平台设备的三维模型,并为三维模型设置材质和外观,使模型最大程度地反映真实设备的状况。利用高效离线编程软件RobotStudio 的Smart 组件设计动态物料的运动过程以及真空吸盘的动作,使工业机器人虚拟仿真平台具有真实平台的效果,有效地模拟了工业机器人搬运物料的工作过程。因此,基于RobotStudio 的搬运机器人虚拟仿真可以提升搬运机器人的设计、控制和路径规划等方面的能力,有效缩短了工业机器人现场的编程时间,防止工业机器人因误操作造成损坏,同时也为搬运机器人的应用提供了理论支持和实践基础。
1 工作站布局及Smart组件的创建
1.1 RobotStudio简介
RobotStudio 软件是由ABB 公司开发的一款机器人虚拟仿真软件,可以用于机器人系统的设计、程序开发、调试以及任务规划等方面[6-8]。该软件具有用户界面友好、建模简单、仿真准确等特点,可以提高机器人系统的开发效率和质量,也能够提供丰富的库存图、3D 模型和虚拟环境,用户可以根据实际需要自行选择合适的模型进行仿真分析,还可以对工业机器人系统进行可视化调试,消除潜在的错误和风险[9-12]。通过RobotStudio 的仿真分析,用户可以预先评估机器人系统的性能和可行性,避免了现实中的试错成本。
1.2 工作站模型的建立
在工业机器人的应用中,搬运机器人主要由示教器、控制器、操作机组成,实现了不同形状物料的搬运任务[13-17]。搬运机器人的外围设备主要由工件维修台、设备总控台、上位机、警示三色灯和安全防护栏等组成[18-20]。为了确保工业机器人在真实环境中的准确运行,有必要对工业机器人的各个组成部分进行设计和合理化布局,通过利用三维建模软件SolidWorks 建立机器人搬运虚拟仿真平台以及外围设备的三维模型,并根据实际环境的需要对三维模型的材料和外观进行处理,使其最大程度地反映真实设备的实际运行情况,从而达到工业机器人搬运全过程虚拟仿真的目的。搬运机器人的组成和布局如图1所示。
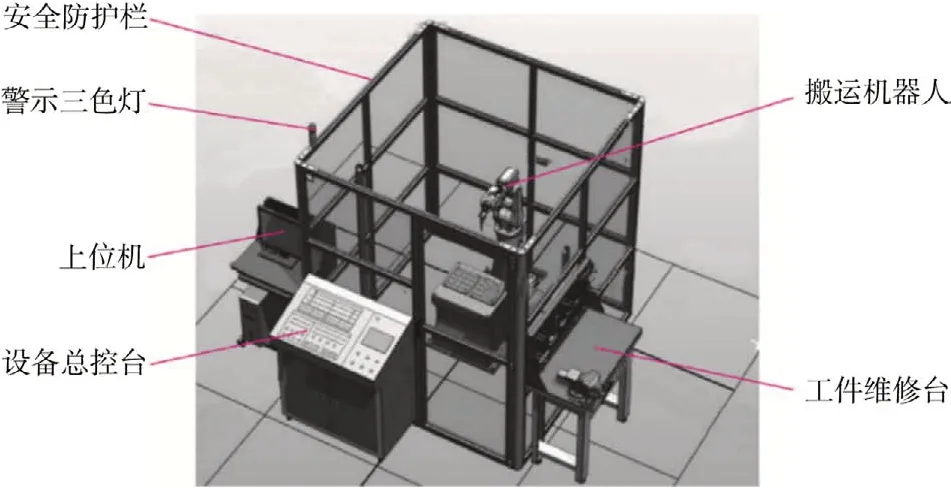
图1 搬运机器人的组成与布局
1.3 Smart组件的设计
机器人在实际搬运中,主要是将工业机器人工作台上的物料盘1 中的正四棱柱、正六棱柱、圆柱、椭圆柱等不同形状的物料运输到物料盘2 中指定的位置。在搬运过程中,工业机器人通过控制真空吸盘将物料吸起、搬运、松开等过程。为了达到与真实平台相同的动态效果,利用RobotStudio 软件中的Smart 组件设计一个动态物料的搬运过程。通过Smart组件的创建,来实现物料的智能化搬运。工业机器人物料搬运的I∕O表如表1所示。
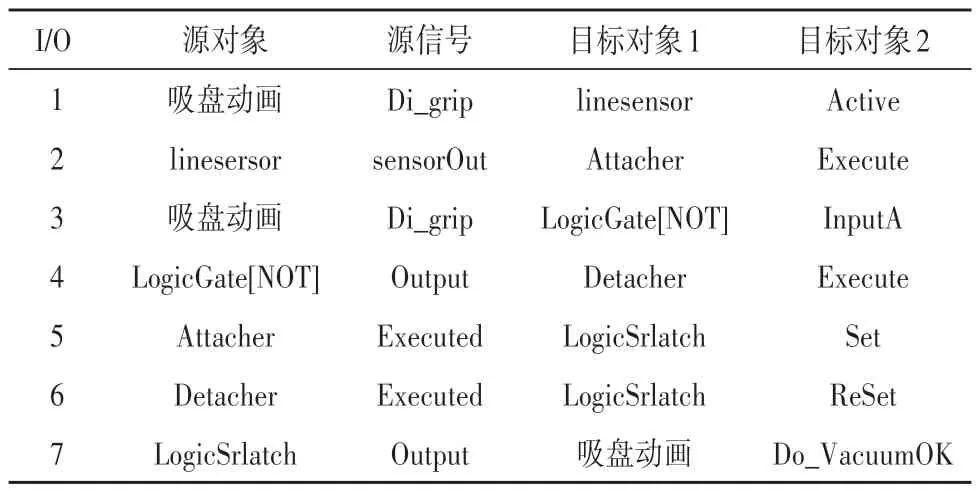
表1 Smart组件的I/O信号和连接
2 仿真平台的整体设计
2.1 工作流程
在搬运机器人在虚拟仿真过程中,工业机器人从工作初始位置出发,带着真空吸盘运动到物料的正上方,控制真空吸盘吸取物料;再将物料放置在指定位置的正上方,然后在控制真空吸盘释放物料;接着,工业机器人以此完成正四棱柱、正六棱柱、圆柱、椭圆柱等物料的搬运,直到4 组物料全部搬完为止;最后,工业机器人回到最初位置,等待再次搬运的指令。机器人搬运虚拟仿真平台的工作流程如图2所示。
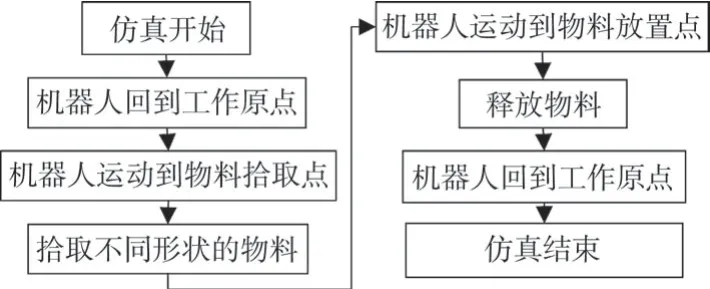
图2 机器人搬运虚拟仿真平台的工作流程
2.2 机器人I/O信号的创建
工业机器人搬运控制系统在运行过程中,需要明确真空反馈将信号反馈给吸盘以及吸盘吸附放置的控制,可在虚拟示教器中配置I∕O 信号、设计工作站逻辑运行等。在示教器的控制面板Device Net 中创建DSQC652 标准I∕O板,地址为13,再配置机器人的I∕O 信号,如表2所示。

表2 机器人的I/O信号
2.3 工业机器人的运动轨迹和程序调试
在工业机器人搬运虚拟仿真过程中,在工业机器人的操作台上放置有物料盘1 和物料盘2,将4 种不同形状的工件从物料盘1中的A、B、C、D位置对应搬运到物料盘2 中的A1、B1、C1、D1位置。搬运机器人与物料盘工位之间的示意图如图3所示。
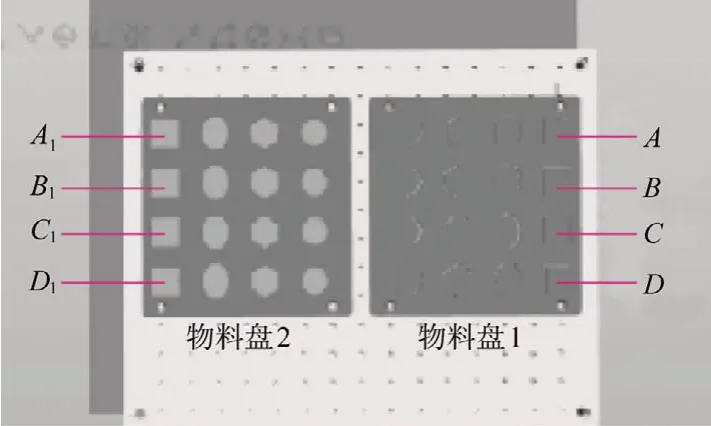
图3 搬运机器人与物料盘工位
为了实现工业机器人搬运的虚拟仿真,有必要对工业机器人的运动轨迹进行规划,验证当前运动路径是否会产生干涉,检验路径规划的合理性。搬运机器人的运动轨迹如图4所示。
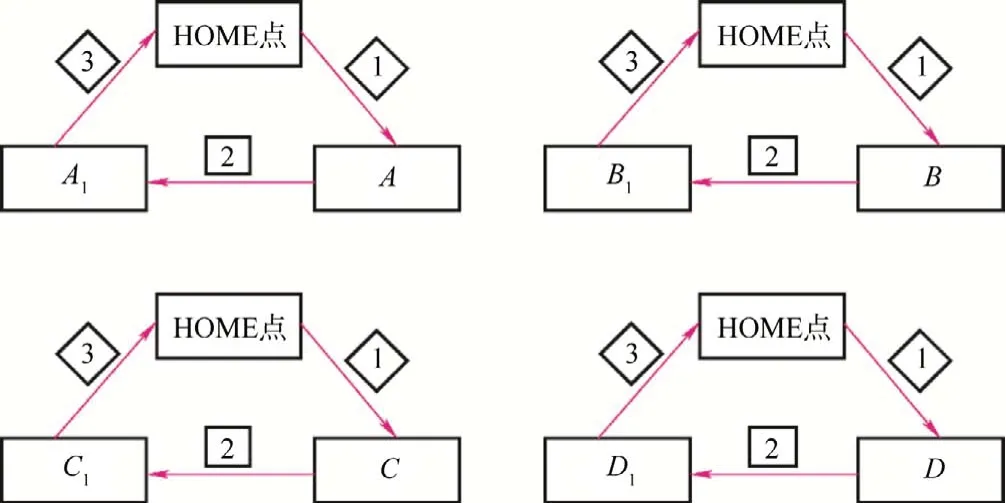
图4 搬运机器人的运动轨迹
根据工业机器人搬运虚拟仿真平台的工作流程,设计1个主程序和2个子程序。2个子程序分别为抓取程序、放置程序。通过主程序调用抓取程序、放置程序,完成整个工作流程。在程序编写之前,利用RobotStudio的“同步”功能,将创建的工具数据、工件数据同步到RAPID,方便程序的后续处理。主程序、抓取程序、放置程序如下所示。
(1)主程序格式如下:
PROC main() ∕∕主程序;
InitALL; ∕∕初始化程序;
WHILE TRUE DO ∕∕循环指令;
zhuaqu; ∕∕调用搬运程序;
fangzhi; ∕∕调用放置程序;
Incr r1; ∕∕移动下一个物体;
ENDWHILE
MoveAbsJ jpos10NoEOffs,v1000,z50,Tool_xipanWObj:=
Workobject_1;
ENDPROC
(2)“抓取”程序格式如下:
PROC zhuaqu()
IF r1 <4 AND r2 <5 THEN
MoveJOffs(p10,70*r1,40*(1-r2),50),v1000,z0,
Tool_xipanWObj:=Workobject_1;
MoveLOffs(p10,70*r1,40*(1-r2),0),v1000,z0,
Tool_xipanWObj:=Workobject_1;
WaitTime 1; ∕∕延时1s;
Set do_xipan;
WaitTime 1; ∕∕延时1s;
MoveLOffs(p10,70*r1,40*(1-r2),50),v1000,z0,
Tool_xipanWObj:=Workobject_1;ENDIF
ENDPROC
(3)“放置”程序格式如下:
PROC fangzhi()
IF r1 <4 AND r2 <5 THEN
MoveJOffs(p20,70*r1,40*(r2-1),50),v1000,z0,
Tool_xipanWObj:=Workobject_1;
MoveLOffs(p20,70*r1,40*(r2-1),0),v1000,z0,
Tool_xipanWObj:=Workobject_1;
WaitTime 1; ∕∕延时1s;
Reset do_xipan;
WaitTime 1; ∕∕延时1s;
MoveLOffs(p20,70*r1,40*(r2-1),50),v1000,z0,
Tool_xipanWObj:=Workobject_1;
ENDIF
ENDMODULE
3 搬运机器人的仿真结果与分析
在程序编写和点位示教完成后,利用RobotStudio 软件中的“仿真”功能,在虚拟示教器中启动主程序进行机器人搬运虚拟仿真平台工作流程的仿真测试,运行效果如图5 所示。由图可知,工业机器人搬运虚拟仿真平台中的机器人能够按照设计程序要求完成规定的搬运工作,以此完成了正四棱柱、正六棱柱、圆柱和椭圆柱四种形状的工件的搬运。其中,对于工业机器人搬运虚拟仿真平台中真空吸盘的机器人装载、卸载动作,以及每个搬运的起始点和搬运的终止点都是依靠预设的程序来完成。整个过程的模拟实现了物料的搬运,真实反映了运动过程,验证了工业机器人虚拟仿真平台的正确性和有效性。
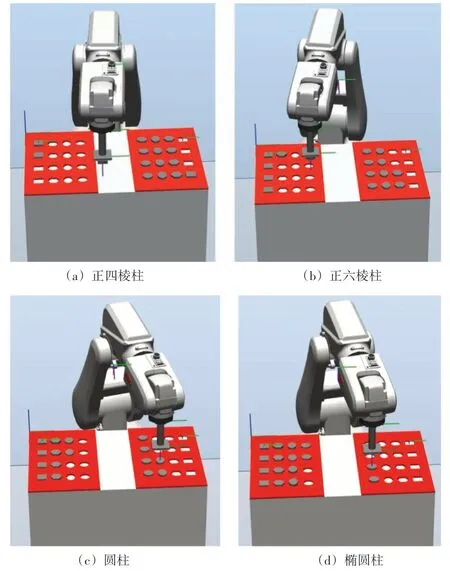
图5 机器人搬运虚拟仿真平台运行效果图
最后,将物料盘1 中正四棱柱、正六棱柱、圆柱、椭圆柱等4 种不同形状的物料采用现场示教的方式进行操作,并与工业机器人搬运虚拟仿真平台在所用时间、准确放入数量方面进行对比分析,得到如表3所示数据。由表分析得出:现场示教的方式易受到物料形状的影响,对于复杂的形状如正六棱柱和椭圆柱分别有2个和1个未能准确放入对应的槽内,而离线仿真不受物料形状的影响,16 个物料全部放入对应的槽内。在所用时间上,离线仿真的方式所用119 s,现场示教操作所用时间为182 s,可以看出,离线仿真的方式明显优于示教操作。
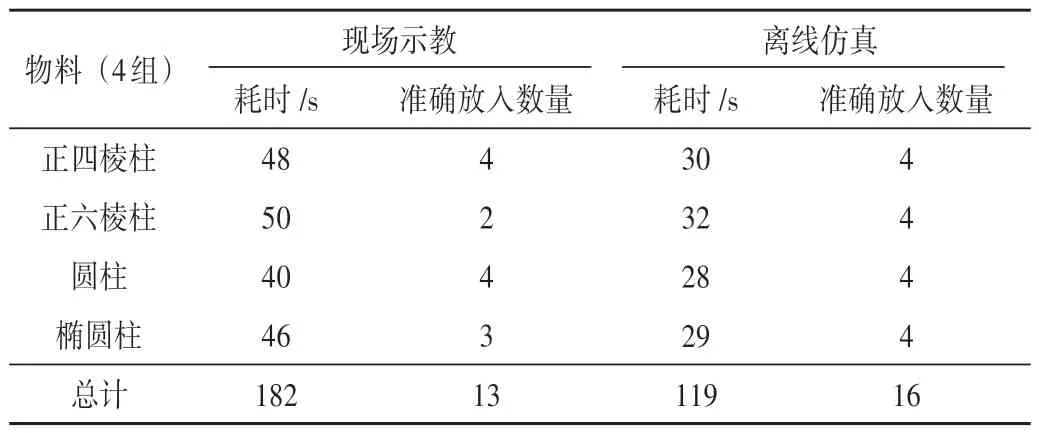
表3 现场示教与虚拟仿真平台对比分析
4 结束语
利用RobotStudio建立了机器人搬运虚拟仿真平台,依次完成了工作站的导入、工作站布局、Smart组件的创建、工作站逻辑创建、I∕O信号仿真以及轨迹编程等工作流程,并设计了机器人搬运物料的主程序、抓取程序和放置程序,成功模拟了机器人搬运平台中正四棱柱、正六棱柱、圆柱、椭圆柱等工件的装载与卸载,真空吸盘的吸取与释放工件的动态效果,实现了机器人搬运平台工作过程的仿真,并与现场示教操作的方式进行对比,其离线仿真的方式在所用时间与准确率上明显优于示教操作,有效验证了该虚拟仿真平台的正确性和高效性,为搬运机器人在现实环境中的运行起到仿真模拟的作用,可代替真实平台进行程序编写和调试,有助于提高工业机器人的应用和编程效率,降低了企业的成本,对于推动工业机器人在生产、制造领域有一定的实际意义。
