使用反射率控制器件的太阳帆卸载策略
2023-11-11齐旋池范才智何管维
齐旋池,范才智,何管维
国防科技大学空天科学学院,长沙 410073
0 引言
太阳帆航天器利用光子撞击在高反射率帆面上产生的光压推进力实现无需工质的空间航行。利用额外的光压力作用,太阳帆能够完成常规航天器无法实现的轨道运动,如日心悬浮轨道、等效开普勒轨道[1]等。在长时间的运行过程中,常规姿态控制方法无法满足太阳帆航天器的要求。因此,诸多学者尝试提出了利用光压作用实现太阳帆姿态控制的多种方案,例如Diedrich[2]首先提出了使用控制杆产生力矩的方法;Wie[3]提出了滚转轴稳定器和移动滑块联合的姿态控制方案;Mettler等[4]、Luo等[5]还深入研究了使用角帆实现主被动姿态控制的多种可行方法。2010年,JAXA的IKAROS航天器首次验证了反射率控制器件(Reflectivity control device, RCD)姿态控制的可行性[6]。通过切换液晶元件通断,成功观察到自旋轴向太阳方向的改变[7]。这为太阳帆控制执行机构提供了新的思路。由于这一类方案不需要任何运动机构,大大减少了太阳帆航天器的结构复杂度和质量,吸引了一些学者对使用RCD实现姿态控制的方案进一步展开研究。Boggrafe等[8]使用4×4划分的RCD帆产生尽可能贴近控制器输出量的控制力矩,实现了姿态镇定。Mashtakov等[9]研究了双卫星编队中RCD相对位置保持和相对姿态控制问题;Kikuchi等[10]使用四分区RCD太阳帆实现了小行星消旋和轨道偏转,该过程与带有太阳帆的卫星或空间站的姿态控制过程具有很高的相似性。
除了使用RCD光压力矩直接进行姿态控制,还可以将RCD光压力矩应用于动量轮卸载。Scudiero和Biggs[11]开发了使用RCD对常规布局卫星进行动量管理的控制方案,在地、月轨道的数值仿真证明了这一技术路线是可行的。Ji等[12]、Ji等[13]研究了使用RCD和改进的RCD的动量卸载问题,提出了基于角度偏差确定RCD状态的一种卸载方法,同时证明了使用RCD能够实现动量轮的完全卸载。然而,以上提出的控制策略都要求RCD的高频切换,长时间运行将导致光学参数的衰减和器件寿命缩减;而且,RCD布局位置和大小是基于经验的。若布局方式不合理,则将造成帆面空间的浪费,挤压其他帆面功能区域的可用面积。
因此,本文提出一种基于反射率控制器件的太阳帆卸载策略。首先,介绍反射率控制器件原理及其光压力矩的计算方法,并根据卫星动力学原理构建姿态控制模型;然后,设计一种RCD状态解算策略,在能够快速完成卸载过程的同时避免出现RCD在短时间内的高频次切换;最后,采用多目标优化方法确定合理的RCD尺寸和铺设位置,最大化发挥反射率控制器件卸载效果。
1 RCD基础原理
1.1 RCD变反射率原理
RCD是一种具有电致变色性质的多层材料组件。一种常用的RCD组件由发射层、聚酰亚胺膜层、铝箔反射层、透明铟锡氧化物(Indium tin oxide, ITO)层和聚合物分散液晶(Polymer dispersed liquid crystal, PDLC)层共同构成[14]。正常情况下,微液晶结构将对入射光产生散射,光线在多次反射中被充分吸收耗散。如图1,施加电场后,分散在固态有机聚合基质中的微液晶会由无向排列转化为有向排列,实现对光线透射的显著增强,达到近似镜面反射的效果。利用这一特性,可以有效实现对光压的调控和姿态控制。受限于材料特性和工艺,RCD能够在2种状态间切换的最大次数是有限的,如文献[15]中设计的一种薄膜的循环寿命约为16~18万次。在本文中,忽略RCD切换过程存在的较小时间延迟,假设RCD为在散射与反射两种状态间瞬时切换的理想器件。

图1 RCD状态切换
1.2 RCD光压力矩计算
太阳光子与太阳帆表面撞击时会发生动量交换,表现为太阳光照射在帆面上时产生的推进作用。在光子撞击帆面时,只会产生镜面反射、漫反射和吸收3种情况,为了表示各部分所占比例,可定义光子镜面反射系数ρs、漫反射系数ρd和吸收系数ρa,并保证这3个系数始终满足:
ρs+ρd+ρa≡1
(1)
使用文献[16]中的光压模型,将作用在帆面上的光压力表示为:

(2)
其中:P=4.56×10-6N/m2为距日1 AU处光压系数,a⊕=1 AU,R为航天器与太阳实际距离,S为有效反射面积,n和nt为帆反射面法向量,s为光矢量。进一步将光压力在帆法向和切向分解,可得:
Fs=Fnn+Ftnt
(3)
(4)
(5)
式中:nt为帆反射面切向量,a=〈s,n〉为阳光矢量和帆面法向量之间的夹角,称为太阳角。
对于本文所研究的RCD太阳帆,其帆面由高反射率的轻质聚酰亚胺薄膜(Polyimide film,PF)、太阳能电池片(Solar panel,SP)和RCD等组件构成,可以使帆同时具备供电、推进和姿态控制的功能。在布局上参考伊卡洛斯号等已有太阳帆方案, RCD通常沿帆面的最外侧布置,而太阳能电池、光学敏感器件等其他装置由中心向外布置,这一布局在实现更大的控制力矩的同时有利于减少帆转动惯量和线缆长度。
基于RCD太阳帆的布局形式,将对整块帆建立的模型应用到每片RCD上,如图2。考虑光压切向分量Ft不产生力矩,结合RCD的几何参数和光学参数可以计算得到n片RCD产生的所有合力矩集合为:

图2 作用在RCD上的太阳光压分解

(6)
式中:SRCD为单片RCD有效受光面积,pi表示第i块RCD形心与帆表面形心之间的相对位置,第i块RCD的反射系数ρs和ρs取决于对应RCD的开关状态vi,见表1。若考虑ρd项较小,可以进一步简化为只考虑镜面反射系数的形式:

表1 RCD基本光学参数

(7)
1.3 姿态控制原理
本文选取原点位于日心的惯性坐标系osxsyszs描述惯性状态;选取与太阳帆固连的本体坐标系oxbybzb描述本体姿态;选取轨道坐标系oxyz描述轨道运动,x轴保持对日指向,y轴在轨道面内指向飞行方向,z轴由右手定则决定,如图3。基于刚体假设,航天器的运动状态描述为[17]:
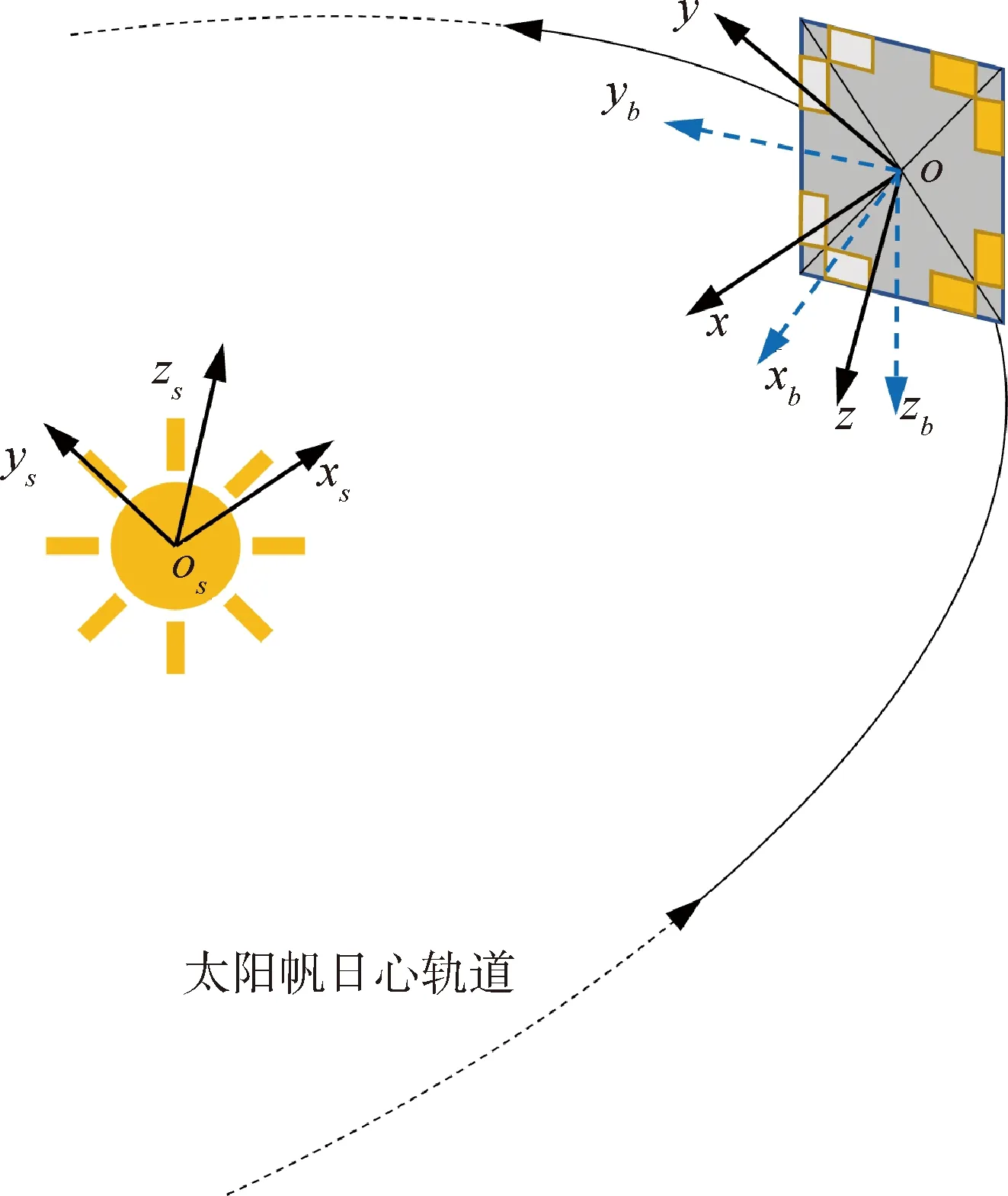
图3 太阳帆日心轨道及坐标系
(8)
(9)
式中:q=[q0,qvT]T为本体坐标系相对于日心惯性坐标系的姿态四元数,ω=[ωx,ωy,ωz]为本体坐标系相对日心惯性系的角速度,I3为单位矩阵,qv×为qv的反对称矩阵,uc为动量轮作用力矩,Ω为动量轮转速,TRXD为RCD产生力矩,J和Jω分别为帆本体和动量轮的转动惯量。
为了实现姿态的快速镇定,动量轮输出力矩采用使用李雅普诺夫方法设计的跟踪控制率[13]:
uc=(Cωd)×(JCωd+JωΩ)-ηωe-λqev-TRCD
(10)
式中:η和λ为正的可调控制参数,角速度误差qe和四元数误差ωe可以根据期望四元数qd和期望角速度ωd计算得到,见式(11)~(12)。由于姿态控制过程相比轨道周期非常短,因此可以忽略轨道角速度的影响。
qe=qd-1⊗q
(11)
ωe=ω-C(qe)ωd
(12)

2 太阳帆卸载策略
2.1 RCD状态解算方法
本节提出一种新的RCD状态解算方法,确保能够以较少的RCD状态切换次数快速完成卸载过程。考虑只要时刻保持卸载力矩在每一时刻保持最大卸载效率,就能达到最快的卸载速度。因此,在理想情况下,希望卸载力矩较大且保持在总角动量的反方向,即期望力矩:
Texp=-h0
(13)

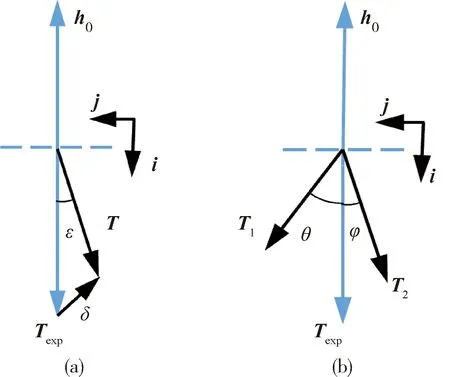
图5 期望力矩与RCD卸载力矩相对关系

(14)
式中:‖‖表示对向量取范数。从式(14)可以看出,偏差力矩δ会导致RCD 卸载力矩偏离期望力矩方向。因此,为保持δ最小,RCD需要在2种状态之间来回切换已满足完全卸载的要求。为避免出现RCD频繁的状态切换,设计以下通过3次状态切换实现卸载和偏差力矩消除的方法。
如图5(b),设待卸载角动量为h0,参考力矩为Texp。则有以下定理成立:


证. 将卸载力矩产生的动量向期望力矩切向及法向分解,可得:
(15)
式中:i和j分别为期望力矩切向和法向的单位向量。式(15)说明经过t1+t2后可实现对初始角动量h0的完全卸载。
注1. 考虑到不同RCD开关组合有可能产生相同的力矩,出于节能和寿命考虑只选择激活数较少的一种RCD组合。
卸载总时间取决于所选择的T1和T2组合。由式(6)可知,通过RCD开关组合只能产生有限种光压力矩,对应的T1和T2的选取方式也是有限的。因此,为了达到最佳卸载效率,可以通过遍历计算找出最优的力矩组合,具体过程见图6。
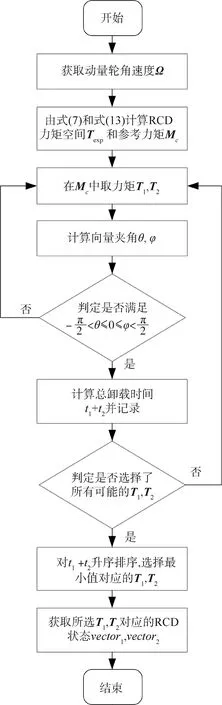
图6 状态解算流程
2.2 RCD布局优化
合理的布局有利于实现更好的控制效率。针对RCD在帆面上的布局位置进行分析和优化,可以进一步提高卸载性能。在总面积为S的帆面上,定义聚酰亚胺薄膜、RCD和电池片的面积比例分别为k1,k2和k3,面密度为σ1,σ2和σ3,所有膜和片的厚度均设为10 μm,且认为各组件均可以平整地紧贴在刚性支撑层上。则帆的总质量表示为:
m=(σ1k1+σ2k2+σ3k3)
(16)
对于边长L的方形太阳帆,质量分布的不同会影响总转动惯量,RCD布局方式的不同将改变可用的控制力矩。因此,为了使用帆面获得更好的控制效果,需要对不同帆面铺设方式造成的质量分布和RCD可用控制力矩进行权衡,从而确定较为合理的帆面布局方式。
考虑到帆面为对称,取一边长为L的方形太阳帆的1/8帆面为研究对象。同时电池片的铺设面积一般取决于整星的能源系统,对特定面积的太阳帆其所占比例k3是固定的。因此,帆面布局主要取决于矩形RCD铺设区域位置。以控制力矩最大、转动惯量最小为优化目标,定义指标函数:
1)衡量RCD最大控制力矩的指标函数
(17)
式中:P为光压系数,a,b,d为衡量帆布局的参数,L为帆边长,见图2。
2)衡量帆转动惯量的指标函数
(18)
式中:总的转动惯量可以由RCD、帆膜和太阳能电池部分的转动惯量叠加而来,即:
Jyy=JRCDy+JPFy+JSPy
(19)
Jzz=JRCDz+JPFz+JSPz
(20)
各惯量分量可以用帆面参数进行表示,如式(21)~(26)。
(21)
(22)
(23)
(24)

(25)

(26)
可以看出,对太阳帆RCD铺设位置的分析可以转化为关于变量θ=[a,b,d]的多目标优化问题。考虑存在的几何约束,将具体形式表示如下:

(27)
3 仿真校验
选取研究对象为一个边长10 m的方形标准太阳帆,在日心圆轨道上运行,日心距取为1 AU。
3.1 RCD布局优化
采用表1中的光学参数和表2中的材料参数,对式(27)使用基于遗传算法的多目标优化算法NSGA-Ⅱ进行迭代求解。设置种群大小为500,最大进化代数为500,超过200代适应度函数未改善时算法即终止。根据任务条件,要求f1≥1.3×10-4N。
计算得出由一组结果构成的帕累托最优前沿,如图7。进一步的参数确定需要根据额外的限制条件和任务指标进行选择。选择参数θ=[2.7,2.2,0.2],此时指标函数为f1=1.31×10-4N,f2=7.09 kg·m2。RCD面积为47.52 m2,帆的附加转动惯量Jyy=Jzz=4f2=28.36 kg·m2,可产生的最大光压力矩TRCD,maxy=TRCD,maxz=2f1(ρs(1)-ρs(0))=1.83×10-4N·m。通过布局优化过程,帮助确定了更加合理的帆面组件面积和位置。如表3所示,与一组未经优化过程的参数相比,在最大光压力矩相同的情况下,优化后的布局参数在铺设更大的RCD面积的同时能够保持更小的附加惯量。在确定RCD片的尺寸和布置位置后,可计算得出所有可达的力矩点分布,如图8。

表3 RCD布局优化效果
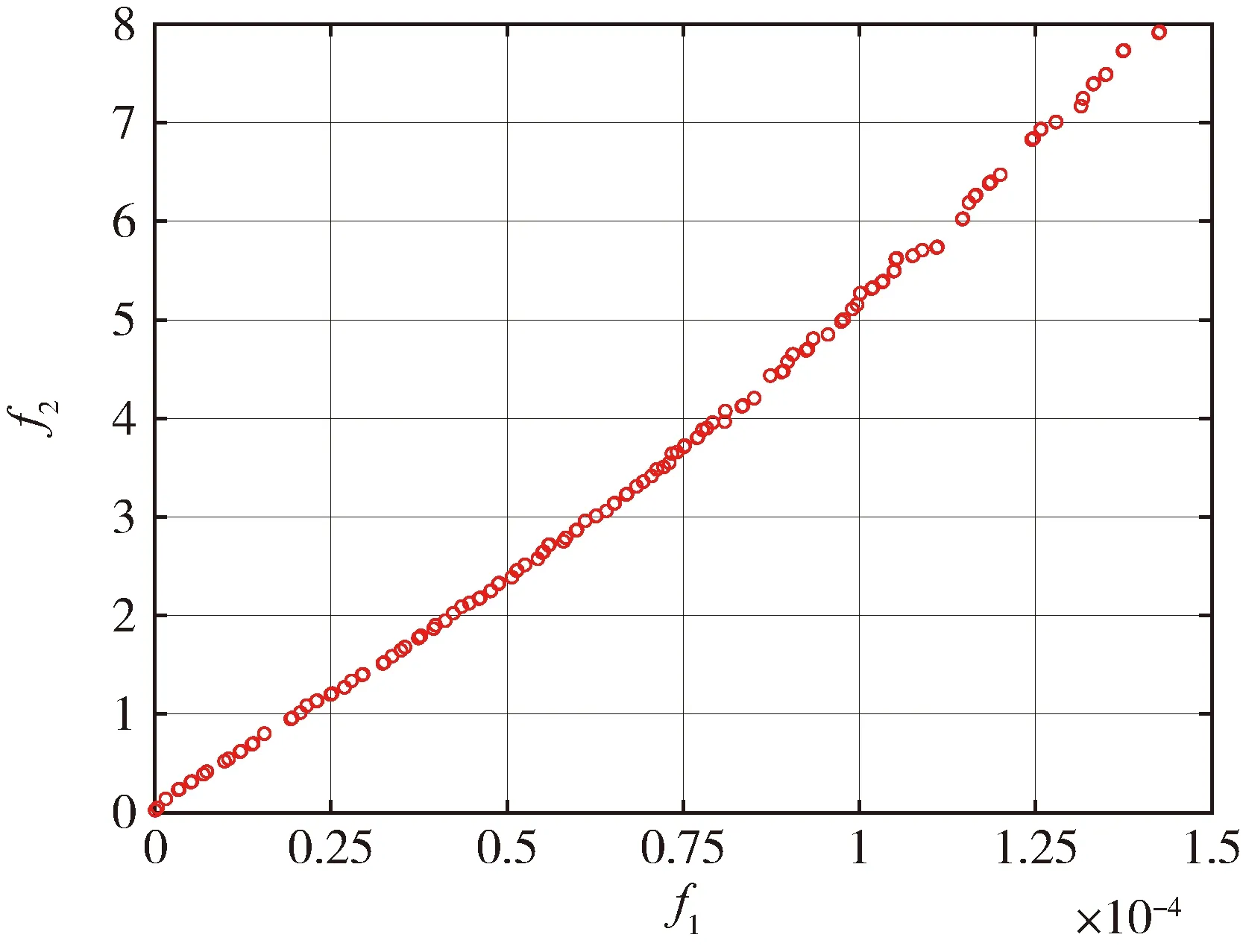
图7 帆面布局优化问题的帕累托前沿
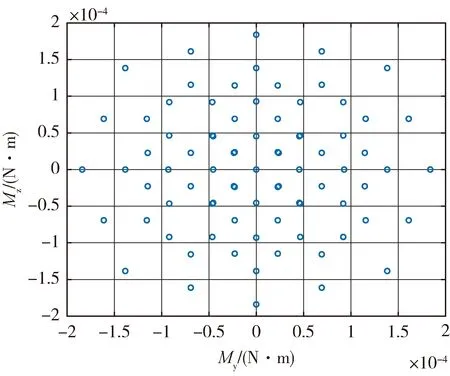
图8 可达力矩点分布
3.2 卸载仿真分析
根据确定的RCD布局参数,对提出的解算策略进行数值仿真。仿真过程中,采用表2和4给出的物理参数。

表4 太阳帆仿真物理参数
与轨道周期相比,姿态镇定过程耗时很短,因此可忽略轨道角速度的影响。对于期望的对日定向姿态,设定控制目标为qd=[1;0;0;0],ωd=[0;0;0]。从图9可以看出,20 s内帆的角度和角速度均已收敛,完成了期望的姿态机动过程,动量轮三轴转速稳定到[125.9;-165.8;244.6]rad/s。
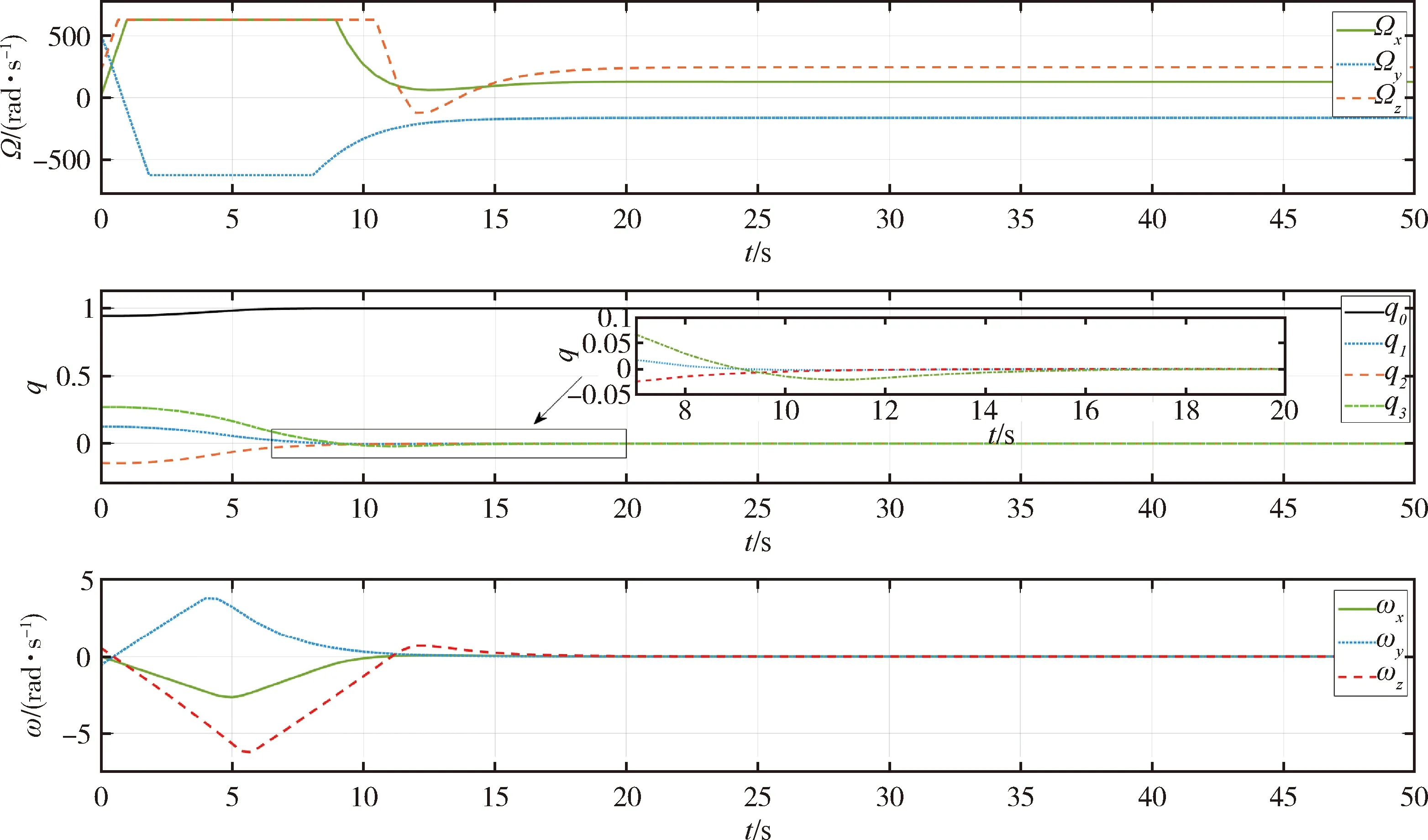
图9 太阳帆姿态参数变化曲线(依次为动量轮转速、航天器四元数和角速度)
为了体现所提出卸载策略的效果,同时对采用文献[12]中提出的策略完成动量轮卸载的过程进行仿真。图10展示了两种算法对于动量轮的不同卸载效果。可以发现,与参考文献中使用的卸载解算策略相比,本文算法大幅提高了卸载效率。在图11中可以看出,本文算法的实际卸载力矩明显更大,卸载前期均能保持在100 μN·m以上,最终节省了58.2%的卸载时间,其中优化过程帮助减少了6.6%的卸载用时,如表5所示。由于RCD材料具有一定的循环寿命,较少的切换频次能够延迟RCD的衰减老化过程。整个过程中,本文算法仅要求RCD在3个状态间进行3次切换。与之对比,文献[12]的算法解算结果出现了严重的高频率切换,完成卸载过程时共计在多个状态间切换达到349次。同时,由于卸载力矩的离散特性,会存在一个很小的剩余动量无法进行完全卸载,导致RCD处于反复切换状态无法及时停止。
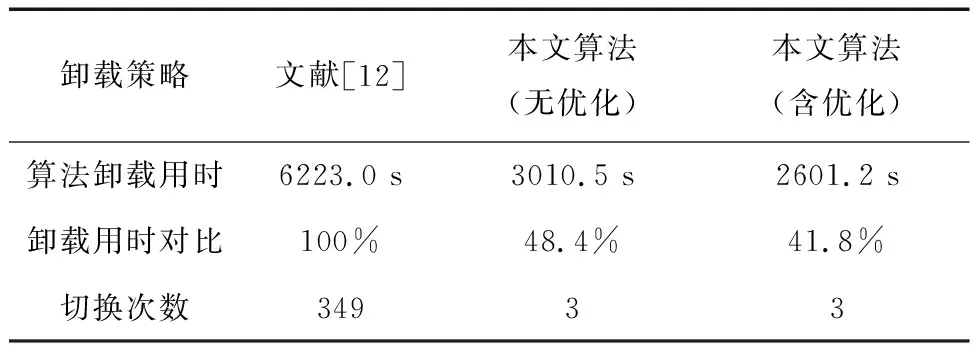
表5 不同策略下卸载效果比较
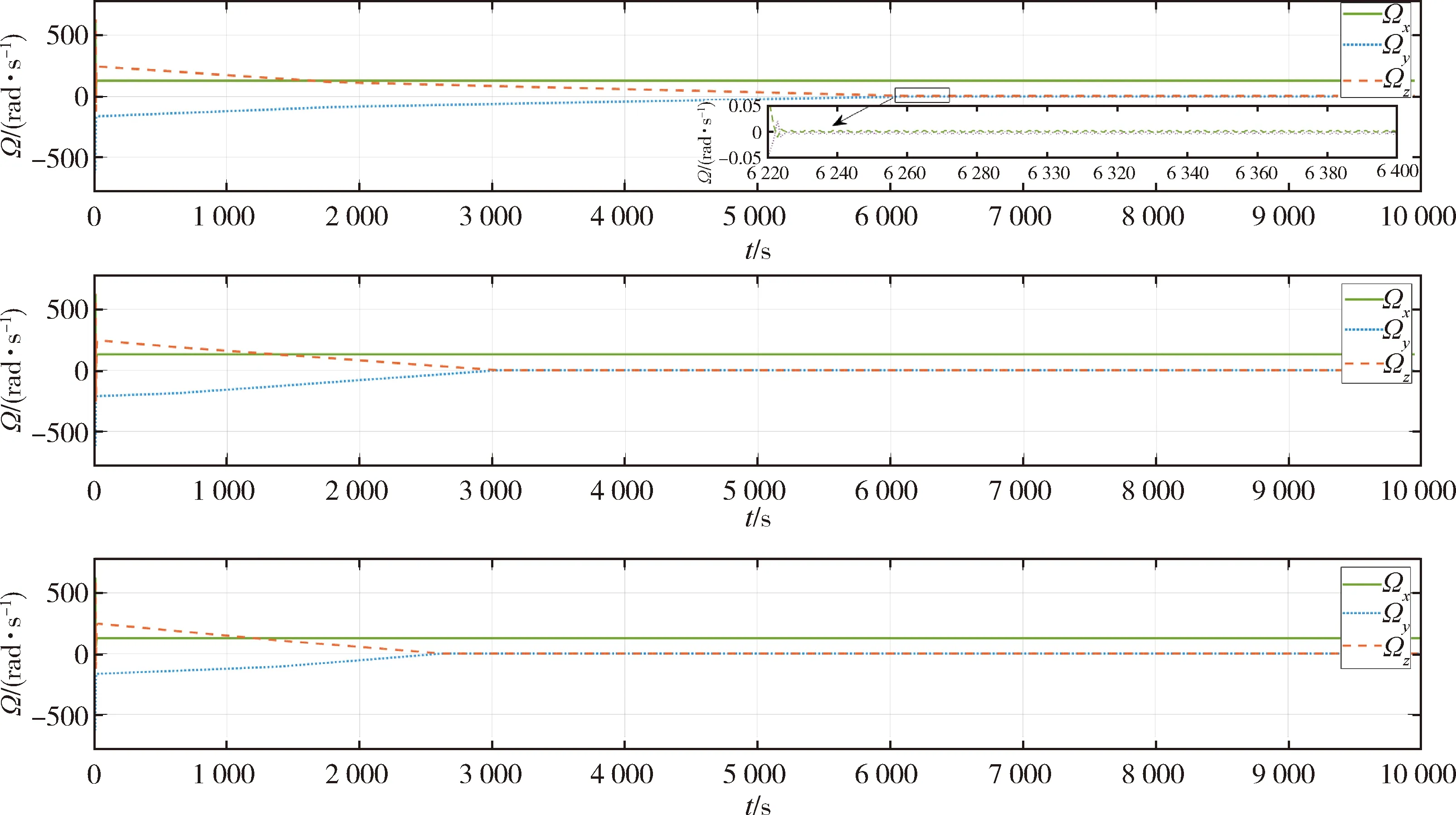
图10 使用不同算法的卸载过程曲线(依次为文献[12]算法、本文算法(无优化)和本文算法(含优化))
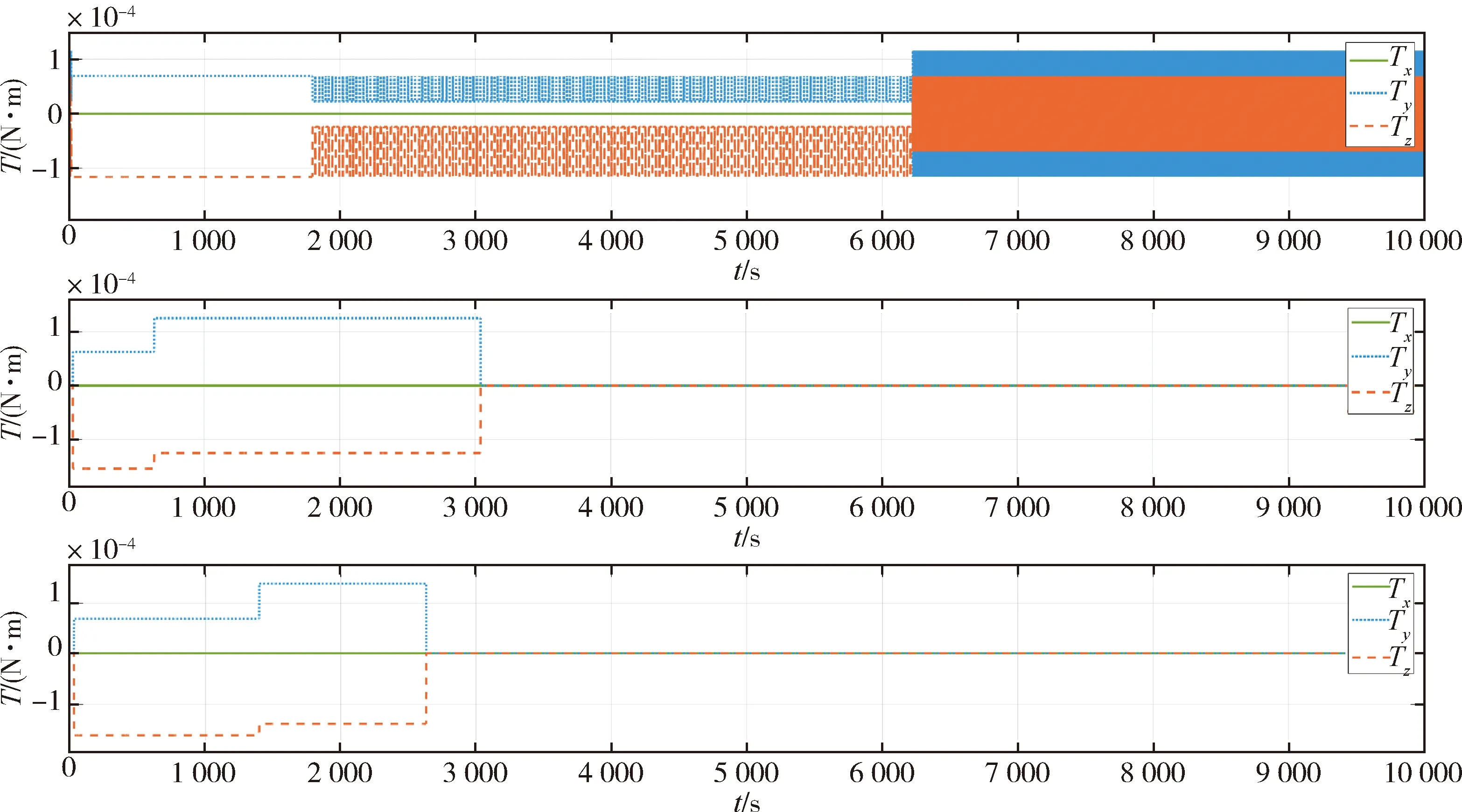
图11 使用不同算法的实际卸载力矩(依次为文献[12]算法、本文算法(无优化)和本文算法(含优化))
4 结论
提出了一种使用反射率控制装置的太阳帆卸载策略。首先,提出了一种RCD状态解算算法。与文献[12]相比,本文提出的太阳帆卸载策略提高了一倍以上的卸载效率,同时能避免出现RCD的高频切换,延长了RCD的使用寿命。其次,引入RCD布局优化过程解决了目前研究中RCD位置和大小确定依赖经验的问题,使卸载效能得到进一步提升。综上,本文提出的策略能够帮助太阳帆在长时间的航行中实现快速可靠卸载,对于太阳帆航天器的进一步推广应用具有一定的借鉴价值。
