空间机械臂在轨维护任务规划与验证研究
2023-11-10胡成威王友渔张文明
朱 超,孔 旭,曾 磊,胡成威,王友渔,张文明
(空间智能机器人系统技术与应用北京市重点实验室 北京空间飞行器总体设计部,北京 100094)
0 引言
航天员舱外活动中,航天员-机械臂协同操作是载人航天工程在轨维护的关键技术。美国、加拿大、俄罗斯等国都相继实现了空间机械臂在轨运行[1],航天员还多次利用出舱活动组装维修空间站和维护空间望远镜等维护维修任务[2]。伴随着我国空间站的全面建成,未来空间操作任务的复杂性、精确性和不确定性,其在轨装配维护离不开航天员-机械臂协同操作技术。
目前,空间维护操作的技术手段大致可以分为4 类:航天员单独操作、单/多机械臂操作、空间机器人与航天员-机械臂协同操作。1984 年美国航天飞机搭载的连杆空间机械臂完成了卫星在轨释放任务。1993-2009 年间美国航天员对哈勃(Hubble)空间望远镜前后进行5 五次舱外维修[4]。1997 年日本Engineering Test Satellite-VII 机械臂在轨成功抓捕目标卫星。国际空间站遥控操作系统(Space Station Remote Manipulator System,SSRMS)多次完成了在轨维护等任务[5]。2007 年美国空间机器人Orbital Express 完成了多次对目标卫星的在轨捕获等任务[6]。
由于舱外作业属于高成本、高风险且极端复杂的工作,在实施前无法通过地面试验精确验证,本文主要通过使用建模仿真与地面试验,研究航天员舱外作业解决舱外维护中任务分配和运动规划等问题。主要涉及航天员在轨维护空间机械臂的任务规划与验证,基于JACK 软件建立维护任务的规划与验证系统,验证航天员可达性及维修过程可操作性分析;评估航天员在轨维护机械臂设计任务的安全性与维修效率;实现基于虚拟现实的沉浸式交互能力;最后再通过地面试验验证维修任务。研究结果将为空间站航天员在轨维修机械臂任务提供理论基础和技术支持
1 国际空间站机械臂调研
在国际空间站(International Space Station,ISS)的建造和全面运营阶段,航天员与空间机械臂独立或协作完成了多种在轨服务任务。从1998 年12 月-2023 年9 月,航天员与机械臂协同完成了259 次ISS 组装和维护活动[2],其中舱外活动时间累积1 310.85 h,平均每次时长约6.25 h。每次舱外都由2 名航天员配合进行,2007 年舱外活动频次最高,达到23 次,详细地统计结果如图1 所示。
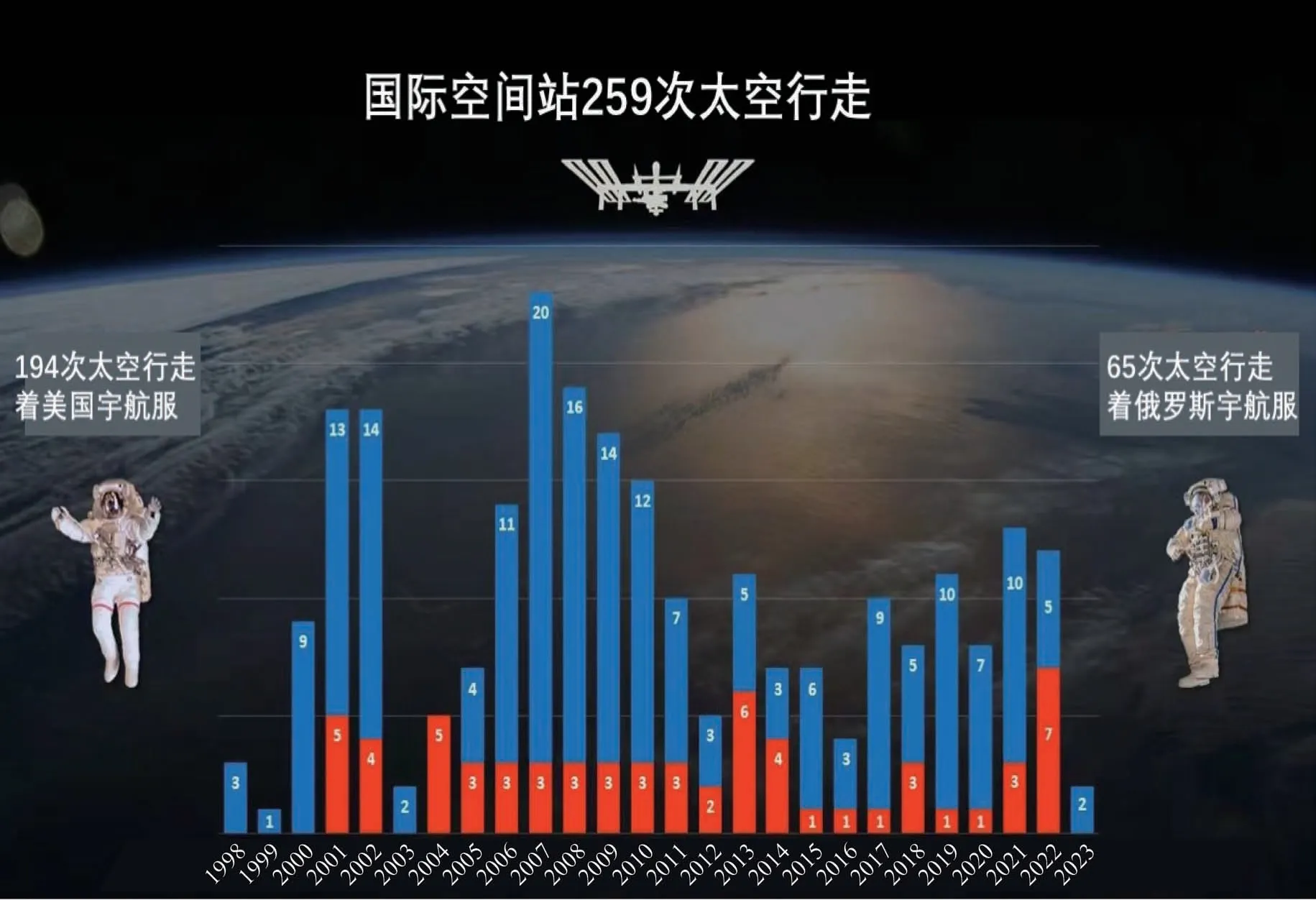
图1 国际空间站航天员舱外活动统计Fig.1 Extravehicular activity statistics of ISS missions
在所有舱外活动中,针对在轨维护机械臂的任务,航天员共进行出舱活动9 次(图1 红色三角形标记所示),其中包括4 次更换机械臂末端和末端相机,3 次润滑末端和关节,1 次更换末端回转关节和1 次出舱完成机械臂Canadarm2 安装并操作试验。其中最近1 次任务是2018 年1 月23 日航天员在轨更换机械臂末端,远征54 任务中由2 名宇航员舱外历时7.4 h,更换了机械臂Canadarm2 的一个性能退化的末端适应器[7],如图2 所示。

图2 航天员在轨维修ISS 机械臂2 的末端适应器Fig.2 Picture for astronauts in the on-orbit mission of maintaining the ISS canadarm2
2002 年6 月13 日进行的STS-111 任务第3 次舱外活动是最复杂的航天员在轨维修机械臂操作,历时7.28 h 更换了机械臂Canadarm2 上的腕部回转关节。在任务过程中,2 名航天员协同操作,其中1 名航天员辅助,另1 名航天员站在航天飞机机械臂末端的脚限位器工作。
综上所述,借鉴国际空间站的经验,我国有必要在机械臂研制阶段,开展航天员在轨维修机械臂任务的研究。
2 在轨维护任务规划系统设计
2.1 在轨维护需求分析
空间机械臂技术也是我国载人航天工程的重大关键技术之一。我国空间站是一个由天和、问天和巡天等多舱段组合的飞行器。空间站机械臂用于保障空间站在轨寿命期间内安全可靠运营,用于完成空间站组装建造、运营管理、维护维修、辅助航天员活动和支持其他的空间应用等任务,是保障我国空间站运行必不可少的工具之一,也是空间站建设和维护的关键设备[4]。
空间机械臂的主要部件包括关节、末端执行器、肘部相机组件、腕部相机组件、中央控制器和目标适配器等。为了保障机械臂的在轨寿命,上述部件在设计时,必须考虑方便在轨维修。目前,针对机械臂的维修主要是通过在轨监控预测各部件工作情况,采用预防性维修策略,必要情况下由2 名航天员出舱对其进行维护维修。
多任务规划、苛刻的航天员舱外活动指标给航天员在轨维护机械臂任务设计带来巨大的挑战。为确保航天员舱外活动指标满足要求,需要综合考虑工作环境的复杂多变性、航天员活动能力约束性、机械臂维护工装,以及手持工具的局限性等要素。因此,建立航天员在轨维护机械臂任务流程规划与验证系统具有重要意义,可为后续舱外工作提供指导。
2.2 在轨维护规划系统设计
航天员在轨维护空间机械臂任务,主要涉及航天员维护流程设计、备件转移、航天员舱外搬运、航天员操作空间分析、航天员操作能力分析、维护装置设计等方面,将航天员在轨维护机械臂流程、维护装置操作过程进行仿真分析,使维护流程设计更加科学合理,为航天员在轨维护机械臂任务提供理论基础和技术保证。
航天员在轨维修空间机械臂任务规划和验证系统总体设计如图3 所示。1)维修任务规划包括任务场景建模和任务设计;2)维修任务仿真包括数据采集,场景实时更新以及虚拟装配;3)维修任务评估包括可达性分析,时效性分析,人机工效分析;4)在轨维修任务支持模块包括航天器轨道和动力学仿真,在轨环境力学仿真;5)维修任务规划验证数据库包括维修规划与任务评估信息管理,维修过程仿真数据管理;6)仿真在线数据模块包括虚拟现实场景实时显示,航天器位姿数据监视,仿真数据监视,人体工效数据监视;7)模型库包括航天员人服系统模型,机械臂模型,航天器模型和工具模型[8]。

图3 航天员在轨维护机械臂任务验证系统功能Fig.3 Functions of the verification system for the on-orbit manipulator maintenance missions of astronauts
2.3 在轨维护任务评估研究
由于航天员在轨维修空间机械臂任务规划和验证系统非常复杂,本文主要开展在轨维护任务的评估研究,包括可达性及可操作性研究、任务安全性和效率研究、虚拟现实交互研究。
2.3.1 可达性及可操作性研究
主要目标是实现基于JACK 平台的机械臂故障部件的航天员可达性及维护过程可操作性分析。JACK 平台负责导入模型、建立场景、制定及维护仿真的运行,基于运动学实现基础的可达性和可操作性分析[9]。模型导入包括了空间站核心舱初样三维模型、航天员人服分析模型、机械臂构型等。内容包括JACK 基础模块,该模块按流程可分为仿真准备、仿真运行、仿真结果分析3 个子模块。仿真准备模块包括场景建立、模型导入、模型间约束建立、维护操作流程设计等功能,所有功能均基于JACK 软件进行二次开发。其中,模型导入功能中导入模型包括航天员人体模型、机械臂故障构型和维护工具模型。仿真运行模块主要实现航天员对机械臂故障维护仿真,以及数据驱动的3D 显示功能。仿真结果分析模块主要实现故障位置可达性分析和维护操作可达性分析功能,并提供分析结果输出功能。
2.3.2 任务安全性和效率研究
基于已有的位置可达性及维护过程可操作性分析基础上,在JACK 基础功能上开发任务分析模块,实现对航天员在轨维护机械臂任务设计的安全性评估和维护效率评估,开展时效性评估、强度预计、人体扭曲度分析、腰背脊柱受力分析[10-11]。在确保维护过程可达性与可操作性满足指标的前提下拓展延伸,充分考虑人工操作约束分析、人体代谢能量消耗计算、维护预估时间分析、扭曲度分析、力量预测、腰脊受力分析、疲劳恢复时间分析和工作姿态分析。
2.3.3 虚拟现实交互研究
增加运动捕获模块,并引入了数据手套、位姿传感器等数据输入设备和VR 显示器等输出设备,实现了在系统运行过程中的维护任务流程控制和交互。同时,VR 显示器的引入也实现了用户的沉浸式显示体验,更加真实地模拟了现场维护环境。最终实现基于虚拟现实的沉浸式交互能力,建设具备人体位姿捕捉及上肢力反馈能力的机械臂虚拟维护实验室。仿真场景中考虑光照、航天器本体及活动部件动力学、在轨环境力学等因素,进一步提升虚拟现实的真实程度[12-13]。
实现基于虚拟现实的沉浸式交互能力,建设具备人体位姿捕捉及上肢力反馈能力的机械臂虚拟维护实验室。试验内容包括VR 硬件设备建设、仿真数据库的建立以及仿真监视软件的建设。仿真数据库主要包括模型库和仿真数据库两部分,模型库主要存储机械臂故障构型、工具模型、航天员人体模型、航天器模型。仿真数据库主要存储维护工况信息和维护过程仿真数据。
3 在轨维护任务规划系统仿真验证
本文以梦天舱机械臂目标适配器为例开展在轨维护任务规划系统仿真验证。
3.1 在轨维修性设计
梦天舱机械臂目标适配器共有2 个,配合机械臂末端执行器使用,可实现机械臂对目标适配器的低冲击、大容差、高刚度捕获。其构型如图4 所示,主要组成有:定位模块、适配器快速连接机构、捕获杆折叠机构、矩形自控电连接器模块、电连接器密封盖、穿舱电缆电连接器模块、壳体结构等。
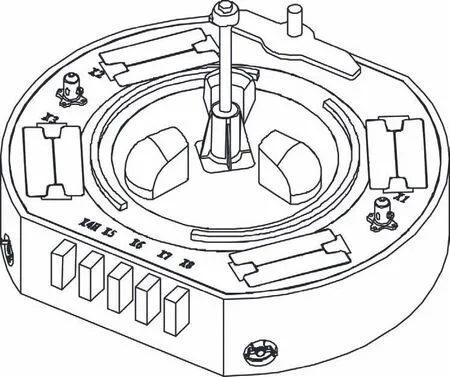
图4 空间机械臂目标适配器三维模型Fig.4 Three-dimensional model of the space manipulator target adapter
空间机械臂目标适配器故障时,先暂停机械臂作业,通过目标适配器上的遥测信号、目标适配器视觉标记有无标记点损伤或缺失、末端执行器捕获该目标适配器等手段开展故障目标适配器的故障定位[14-18]。若无法正常工作,按照维修更换策略,开展部件更换作业,空间机械臂配合航天员开展出舱维修工作,如图5 所示。

图5 目标适配器维修出舱任务规划Fig.5 Planning of extravehicular maintenance missions for the target adapter
3.2 仿真结果
依据空间机械臂目标适配器出舱任务规划进行详细的流程设计,对每步操作进行维修性指标的分配,比如可达性、操作力、操作空间等指标。利用空间机械臂在轨维护任务规划系统建立空间站、空间机械臂、航天员、维修工具等相关模型,构建完整的目标适配器维修虚拟场景,针对目标适配器维修中的典型操作(电连接器插拔、膨胀螺栓拆卸与安装等)进行详细的仿真分析[19-22]。如图6 所示。
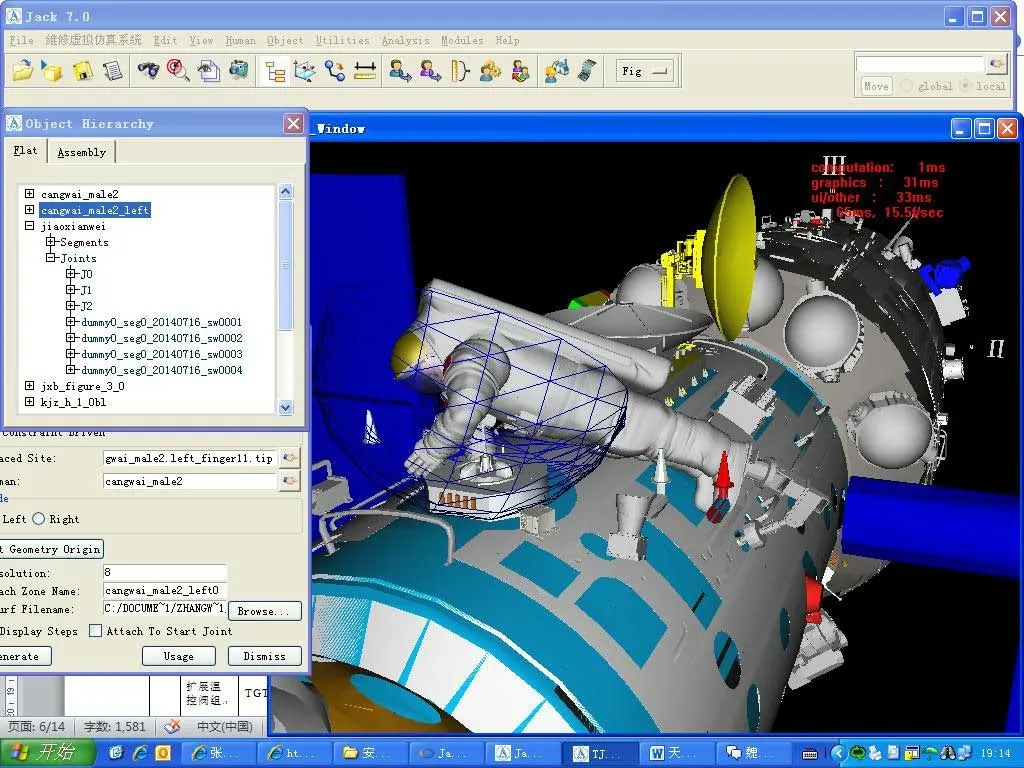
图6 航天员维修目标适配器动作仿真图Fig.6 Simulation for the maintenance motion of the target adapter
通过多轮仿真迭代优化,目标适配器维修中的电连接器插拔、膨胀螺栓拆卸与安装等操作满足航天员的可视性、可达性、可操作性、安全性等指标要求,同时确定目标适配器维修构型,形成完整的维修操作流程,最终验证整个维修任务的合理性。
4 结束语
本文以航天员舱外维护空间机械臂为背景,建立空间站运营中航天员在轨维护机械臂的任务规划与验证系统,验证了航天员可达性及维修过程可操作性,并通过该系统评估航天员在轨维护机械臂目标适配器维修设计的合理性,为后续开展航天员舱外活动训练与实施提供理论依据。