一种基于局部方差改进的自适应USM 算法
2023-11-10杜新阳张爱军
杜新阳,张爱军
(南京理工大学机械工程学院,江苏南京 210094)
非锐化掩膜算法(Unsharp Masking,USM)因简单高效,被广泛运用于图像增强。该算法可与不同方法结合,如Beta[1]、小波变换[2-3]、Lap、Sobel算子[4]、梯度最小化[5]、分数阶导数等[6-7]。上述方法针对特定场合且处理器要求高。另一方面可结合滤波器,如中值[8-9]、双边滤波[10-11]或自适应增益。上述方法存在增强程度不可控或对比度低的问题,同样不适用于家庭监控系统。
该文在上述方法基础上提出一种结合双边滤波、高斯滤波和CLAHE 算法的自适应图像增强算法,该算法结构简单且处理结果较好,适用于家庭监控环境。
1 掩膜算法思想
1.1 传统非锐化掩膜算法
传统线性非锐化掩膜算法计算公式如式(1):
其中,I(m,n)为输入图像信息;z(m,n)为高通滤波器输出信息;λ为增益系数,数值越大增强越明显;Isharp(m,n)为增强后的图像。
在此基础上,常用的改进方法有z(m,n)替换为原图像与原图像低通滤波后低频部分作差的结果,或是λ(m,n)取代λ成为可变量等。
1.2 文中改进后的非锐化掩膜算法
传统USM 算法中常使用高斯滤波得到原图像的低频信息,再与原图像作差获得高频信息。此方法存在因过冲欠冲问题引起失真的缺陷,如图1 所示。而双边滤波能够很好地维持图像地边缘部分。同时,对比度很大程度上影响了人肉眼观察图像的质量。李佳等的研究表明,直方图均衡化后,图像对比度得到了很好的增强且细节丢失较少[12-13]。

图1 锐化示意图
该文针对传统非锐化掩膜算法,结合双边滤波、高斯滤波以及CLAHE 算法,提出一种新的计算流程,如式(2):

图2 改进后USM算法流程
2 文中算法原理
2.1 滤波器的选择与使用
2.1.1 双边滤波
双边滤波能同时考虑到像素点与周围像素的空间关系和临近像素点灰度值的相似性。双边滤波公式如式(3)-(4)。
其中,ω为归一化参数;Ii为原图像像素点,j∈N表示以Ii为中心的像素区域,σd和σr为高斯函数标准差,Gσd为空间权重,Gσr为灰度权重。距离中心像素越远空间权重越小,灰度值差异越大灰度权重越小。
与高斯滤波单权重不同,双边滤波在空间权重的基础上结合灰度权重,两者权重系数相乘,得到最终的卷积模板,双边滤波卷积模板如式(5)所示。
其中,p为像素模板的权重系数,g为距离模板的权重系数。
2.1.2 高斯滤波
将高斯函数与图像进行卷积,即可获得图像的低频信息。为避免图像低频区域的信息幅度过低,对高斯滤波进行标准化的处理,如式(6)。
通常取a,b∈[-1,0,1]的滤波模板,如式(7)所示。
2.1.3 自适应直方图均衡化
对比度由两个相邻区域的亮度差异产生。对滤波后的图像进行对比度增强能在提高对比度的同时抑制部分噪声。常用直方图均衡化对彩色图像进行对比度的增强[14-15]。
对比度提高在直方图中体现为各灰度值上像素数量的减少。处理结果对比如图3 所示,CLAHE 处理后的图像直方图像素数量明显比原始图像少,部分像素值趋于0。横坐标为像素值,纵坐标代表每一个像素值出现数量,该文后续直方图同上。
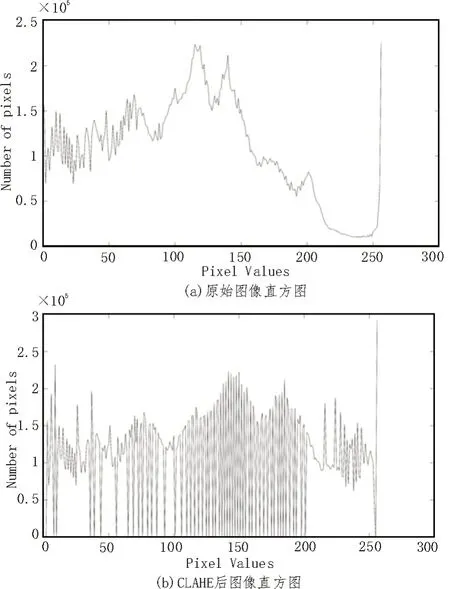
图3 处理结果对比直方图
虽然CLAHE 算法会放大一部分噪声,但针对普通居家环境来说微小噪声带来的影响可以忽略不计。从实验结果也能看出,双边滤波之后再对图像进行直方图均衡化,能够在一定程度上抑制平坦区域的噪声干扰。
2.2 自适应函数的构造
传统USM 算法中细节层直接乘以常数λ增益,此方法存在微小细节达不到放大效果或是噪声被放大的缺点。非线性USM 中,采用基于待处理图像信息变化的λ(m,n)函数代替λ。这样能够合理抑制图像的平坦区域的高频信息,放大图像边缘细节部分。利用图像局部梯度值的思想,提出一种基于局部方差分布的自适应函数。具体步骤如下:
1)计算图像像素点局部方差。取图像任意像素点x(m,n),定义以x(m,n) 为中心的3×3 像素矩阵A。计算像素矩阵A的均方差d(m,n):
2)选取阈值。在不考虑图像边界像素点的情况下,对于一幅像素点分布为M×N的图,任意像素点x(m,n)均存在与之对应的均方差d(m,n)。各像素点d(m,n)值可用于判断该点增益系数。为防止直接调用d(m,n)引起误差,对该值进行标准化。图像必定存在一个像素点对应值dmax,定义函数s(m,n) 将d(m,n)值标准化至0~255 区间,如式(9)。
增益函数的自适应性体现在对图像的不同区域采用不同的增益强度。s(m,n)将各像素点划分到0~255 的区间,再由式(10)根据各点的s(m,n)值判断当前增益系数。λmax可据不同应用场景调整。
3 实验结果与分析
当原始图分辨率为389×387,高斯滤波窗口为15×15,σ为5;双边滤波半径为3,全局方差为5,局部方差为0.1 时,实验结果较理想。观察图4 中传统USM 与该文算法结果可得,该文算法在对细节部分有很好的增强效果的同时,保证了图像亮度和对比度得到有效改善。

图4 算法效果对比
此外,该文模拟视频图像可能出现的噪点噪声,对原图像添加椒盐噪声进行模拟。加噪去噪结果如图5 所示。对比可看出,虽然在明亮处的椒盐噪声抑制不如在暗处,但是图像整体椒盐噪声都得到了很好的抑制。因此该文算法对噪点有很好的抑制作用。

图5 添加噪声后处理对比图
除上述主观观察外,该文还使用客观标准评价图像质量。峰值信噪比(Peak Signal-to-Noise Ratio,PSNR)能够客观评价图像增强后产生的噪声。图像PSNR 值越大,抑制噪声的能力就越强,则图像质量越好[16]。计算结果如表1 所示。
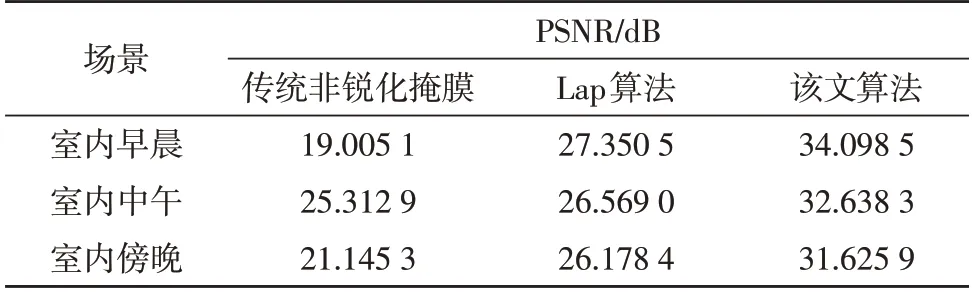
表1 不同增强算法的PSNR值
从表1 中数据可以看出,该文算法的PSNR 值比传统非锐化掩膜高28%以上,比Lap 算法高22%左右,程度依不同图像而改变。同时从图6 和图7 的RGB 三通道直方图和整体图像直方图中可得,图像处理前后的过冲与欠冲问题得到了较明显改善。因此该文算法能够在锐化图片的同时有效抑制噪声、突出图像边缘细节部分,且提高图像对比度。
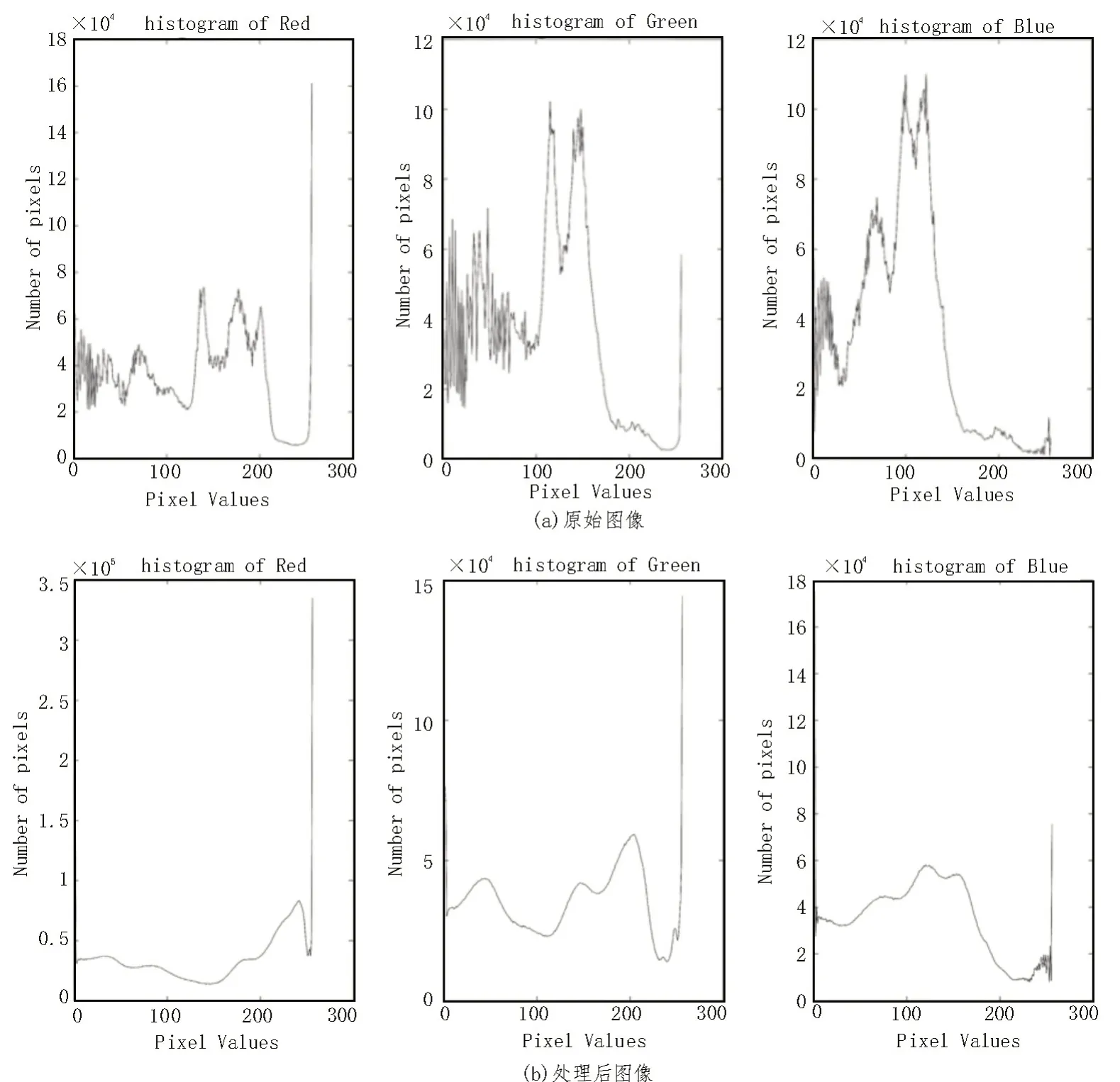
图6 RGB三通道直方图
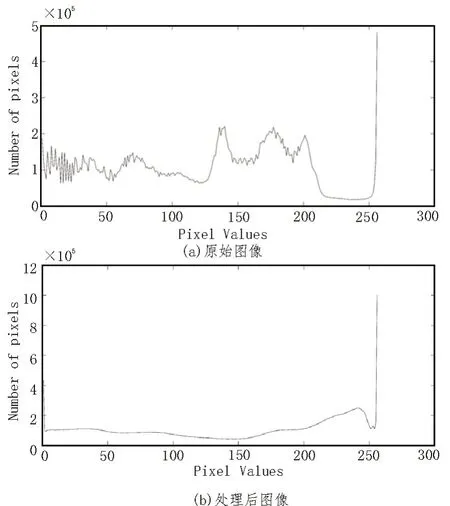
图7 整体直方图对比
4 结论
该文提出了一种改进的非锐化掩膜算法,该算法通过双边滤波与高斯滤波分别提取图像的边缘细节部分和平坦部分,并作差得到掩膜模板。同时对双边滤波后的图像进行CLAHE 处理以提高对比度,与自适应增强后的掩膜模板结合得到最终图像。实验表明,该算法能够在一定程度上抑制噪声并缓解图像边缘过冲和欠冲的现象,有效提升图像质量。
