车用永磁同步电机控制器系统开发与实现
2023-11-10欧阳泽华李学明张亮何琪
欧阳泽华,李学明,张亮,何琪
(1.三一集团湖南汽车制造有限责任公司,湖南长沙 410100;2.中车株洲电力机车研究所有限公司,湖南株洲 412001)
车用电机是将电能转化为机械能并为车辆提供动力的关键部件,永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)因具有结构简单、效率高、弱磁调速性能优良等优点[1-4],是电动汽车(EV)及混动汽车(HEV)电驱动系统理想的动力源。
车用永磁同步电机控制系统通常采用矢量控制。在基速以下,要求车辆动力系统需有良好的转矩输出性能,故通常采用MTPA(Maximum Torque Per Ampere)控制方法[6-7]。在基速以上,通常采用弱磁控制方法。弱磁控制能保证在逆变器容量不变的前提下,提高驱动电机的启动加速能力、爬坡能力,扩大高速运行范围能力[8-9]。
文中在分析永磁同步电动机的基本特性及控制算法的基础上,提出了车用电机控制器的软硬件设计方案。主控芯片选择Infineon公司的SAK-TC234T-64F200N 单片机为主平台,通过分析各硬件功能模块的工作原理,完成硬件电路设计。同时,文中提出了一种自适应最优弱磁控制算法,实现了车用永磁同步电动机控制器的模型设计。通过对样机进行试验研究,证明了系统方案设计的合理性。
1 永磁同步电机控制原理
1.1 永磁同步电机的数学模型
PMSM 系统具有多变量、非线性、强耦合等特性,为了建立正弦波PMSM 的d-q轴数学模型,首先作如下假设:①忽略电动机铁心饱和、涡流及磁滞损耗;②电动机的电流为对称的三相正弦波电流。
永磁同步电机在d-q坐标系下的数学模型如下:
定子电压方程为:
磁链方程为:
电磁转矩方程为:
式中,ud、uq为定子直轴、交轴电压分量;id、iq为直轴、交轴电流;Ld、Lq为直轴、交轴电感;Rs为定子电阻;ωe为电角速度,ωe=Npω(ω为机械角速度,Np为极对数);ψf为空载永磁磁链。
1.1.1 电压极限椭圆
永磁同步电机稳态时在d-q坐标系下的电压方程为:
式中,ulim为定子限制电压;当转速ω固定时,id和iq在d-q坐标里的图形为椭圆。随着转速的上升,电压极限椭圆往中心收缩,形成一系列动态椭圆簇[12-13]。对于车用永磁同步电机而言,一般采用内置式,即Lq≠Ld,电压极限椭圆的中心点为(-ψf/Ld,0),电压极限椭圆如图1 中椭圆环所示。
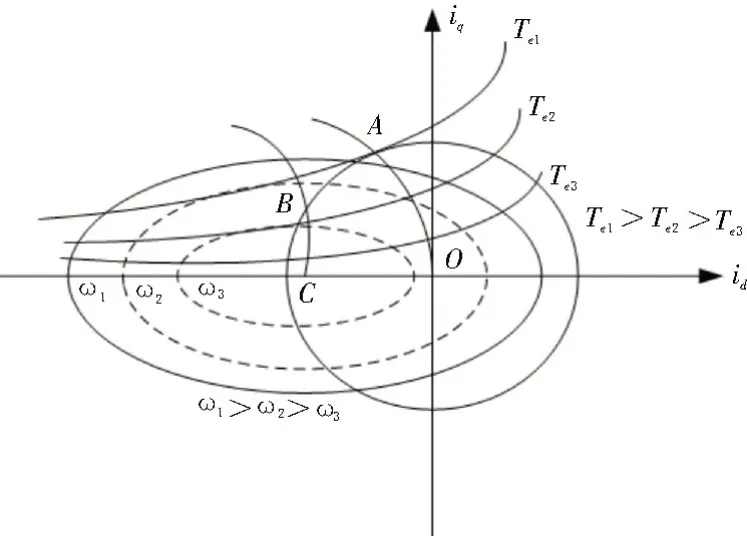
图1 电机定子电流矢量轨迹图
1.1.2 电流限制圆
电机的最大电流及可持续的时间是电机的固有参数,当工作电流过大时将会导致电机过热,并对定子绕组造成不可逆损害。因此需要在设计中标定控制器的最大工作电流,以保证IGBT 等关键功率器件的使用寿命。电机和控制器的工作电流会受到最大电流的约束,其数学表达式为:
电流极限圆曲线如图1 中圆环所示。
1.2 最大转矩电流比控制
最大转矩电流比(MTPA)算法的思想是使永磁同步电机定子单位电流所产生的电磁转矩最大;控制核心是在给定参考值下计算id、iq的最优组合,实现定子电流幅值最小,从而降低逆变器的功率等级要求。对于任一给定转矩Te,选择其中电流矢量幅值最小的一个用于控制,则产生给定转矩所需定子电流最小,即最大转矩/电流比控制,如图1 中的O-A段,电流id的数学表达式为:
1.3 弱磁控制
车辆在高速运行时,由于电机转速高于基速,逆变器输出电压受到车用电源电压的限制,不能继续通过调节电压来提速,如图1 中的A-B-C段。此时需要通过削弱气隙磁场来降低电压限幅,从而提升转速,这就是弱磁控制,弱磁控制可以有效地提升车辆的驱动性能。通过永磁同步电机直轴电流的负向增大等效地减弱电机气隙磁场,实现永磁同步电机弱磁升速目的;或者减小定子电流的交轴电流,从而减小其永磁磁场的方法来实现弱磁扩速;但由于交轴电流的减少,其最大转矩输出也会降低。电流id的数学表达式为:
2 控制器硬件设计
2.1 控制系统设计
文中所设计的永磁同步电动机控制系统结构如图2 所示。该系统主要由主控板、功率驱动板、IGBT 单元和永磁同步电动机组成。TC234 内部含一 个32 位TriCore MCU,主频 为200 MHz;I/O 口供电电压为DC 3.3 V,内部GTM 模块可以实时输出6 路SVPWM 信号,用于驱动IGBT 的上下桥臂。集成的ADC 模块可5 V 供电,为提高系统可靠性,MCU 核心电路与外围采集及驱动电路进行电气隔离设计。

图2 控制系统框图
2.2 相电流采集电路设计
电机绕组为星型连接,根据基尔霍夫电流定律,三相电流之和为零,故在检测时仅需检测其中两相即可。电路由传感器电流采集和信号调理电路组成。电流传感器采用LEM 公司的HAH1DRW800 传感器。该传感器采用+5 V 单电源供电。传感器输出电压与被测电流的关系为:
式中,uout为输出电压;Ip为被测电流;uc为供电电压;S为灵敏度;u0为uc2。MCU 通过读取电压的AD 值,根据式(8)运算后可获取当前的被测电流值Ip。为了过滤噪声干扰,前级电路在电压值进行AD 转换前需要作滤波处理。为了有效滤除定子电流中的谐波干扰,设计中采用低通滤波加电压跟随电路。电路图如图3 所示。
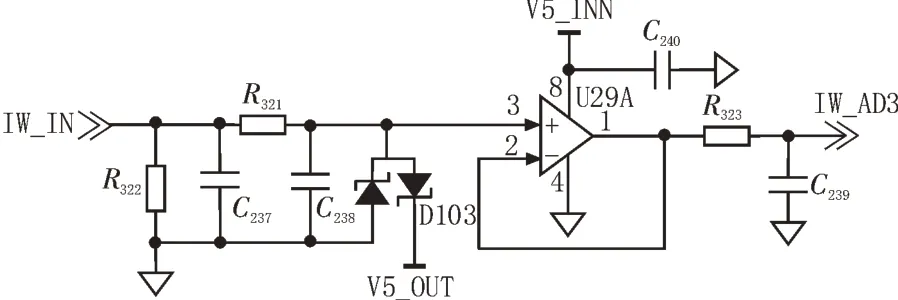
图3 相电流采集电路
2.3 母线电压采样电路设计
电机工作在大功率制动能量回收或大功率充电时工况状态下,将导致直流母线电压升高,此时需要进行能量泄放。当电机长时间工作在大功率输出的工况下时,若电机输出扭矩不能满足负载扭矩要求,将导致电机堵转,从而损坏电机。因此设计母线电压检测电路,可以保证系统工作的可靠性。检测电路由信号隔离电路及信号调理电路组成,如图4 所示。电路可在高噪声电机控制环境中,监测母线电压的变化,控制系统根据检测电压值将母线电压维持在合理工作范围内。

图4 母线电压采样电路
2.4 转子位置采集电路设计
位置传感器采用旋转变压器,为了增强系统的集成度和减少控制器TC234 的运算负荷,电路采用AD2S1210 集成芯片对旋转编码器的信号进行处理。芯片内部集成了数学运算处理功能,其工作原理为在旋转变压器的初级绕组上加入基准源激励信号Vr,Vr=Vp×sinωt,在次级绕组上分别得到Va和Vb:
两者进行差值处理后为:
利用芯片内部产生的合成基准信号解调该信号,处理后得到:
上式化简后得到:
式中,Vp为激励信号幅度,θ为转子位置角,sinωt为转子激励频率,E0为转子激励幅度,φ为芯片内部转换器产生的输出角。当θ-φ的值较小时,E0sin(θ-φ)≈E0(θ-φ)。芯片通过内部处理,将误差信号归零,使φ=θ,从而获得旋转变压器的转子位置角。
2.5 温度检测电路设计
温度检测电路用于采集电机温度和IGBT 模块的温度,防止过热导致电机及IGBT 模块的损坏。采集信号为电阻信号,因此采集电路设计有上拉电阻,当NTC 随温度变化时,采集端口的电压也随之改变。MCU 将采集的电压AD 值转换为NTC 的电阻值,通过查表获得当前温度值。
2.6 CAN接口电路设计
电机控制器与整车其他控制部件之间的网络通信使用CAN 总线,整车控制器(VCU)通过CAN 总线获得电机运行状态信息,相应的电机控制器接收来自整车控制器的转矩与转速等控制报文。TC234 处理器内部有CAN 控制器模块,可处理CAN 协议,接口采用电气隔离设计,通过光耦隔离芯片及CAN 接口电路设计实现电气接口的匹配。设计电路如图5所示。
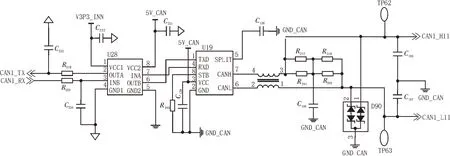
图5 CAN总线接口电路
3 算法设计
3.1 自适应最优弱磁控制
为实现电机在任意转速下尽可能扩大转矩输出范围并使控制电流最小,文中综合最大转矩电流比与最小磁链转矩比算法的特点,提出了一种自适应最优磁链控制策略,其控制算法原理流程如图6 所示。图中各变量符号含义如表1 所示。

表1 变量含义

图6 自适应最优弱磁控制算法流程图
3.2 控制系统原理
为保证良好的速度跟踪效果,文中在转速闭环控制中采用积分分离PI 算法,使系统在启动、结束和大幅度增减设定时,不会因积分积累导致控制量出现较大的超调。此外,在控制器中增加电压前馈环节,补偿式(1)中的耦合项,即补偿反电势来消除转速变换对电流控制的影响,提高系统的动态性能。整个控制系统原理框图如图7 所示。
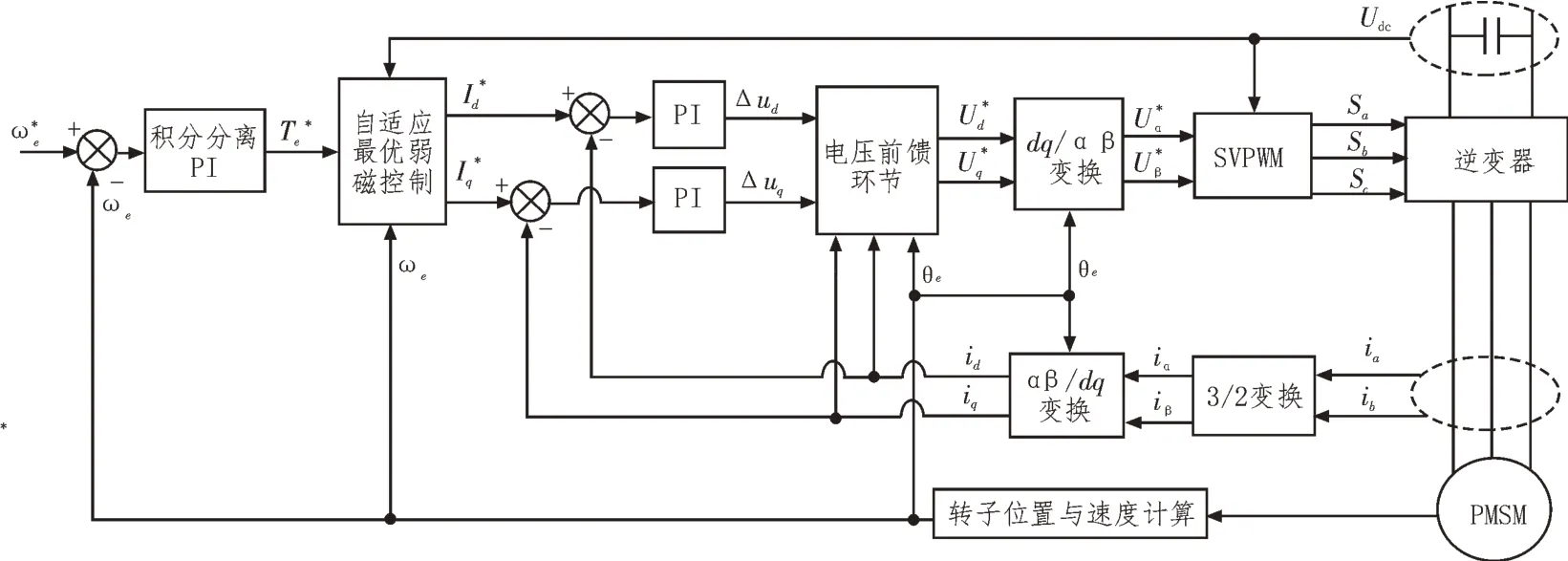
图7 所提PMSM控制系统原理框图
4 试验结果
试验平台所用电机相关参数如表2 所示。为验证所提算法的有效性,从t=0.1 s 开始,设定速度从0开始线性增加至650 r/min,t=4 s 开始线性下降至0,在t=2 s 时突加200 N·m 负载,模拟电机的加减速度控制以及负载突投来进行测试,得到相关测试结果如图8-9 所示。
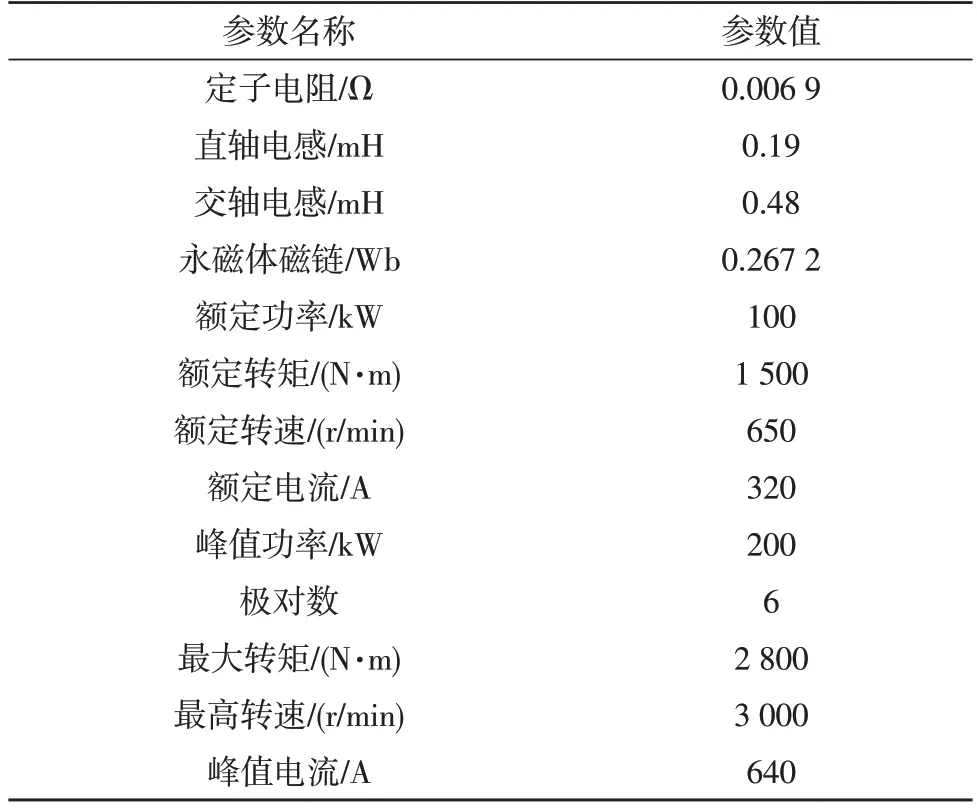
表2 电机参数

图8 速度跟踪效果
从图8、图9 可以看出,整个过程中控制系统通过对d轴、q轴电流的有效控制,能对设定速度进行准确无静差跟踪,而在负载突投时能快速响应,并进行及时调节,具有良好的控制性能。

图9 d轴、q轴给定电流
5 结论
文中设计了一款汽车级永磁同步电机控制器,采用矢量化控制技术,对MTPA 控制及弱磁控制原理进行分析;提出了一种自适应最优磁链控制策略,并通过仿真验证了算法的可行性。根据控制原理设计了相关控制电路,阐述了相电流检测电路、母线电压检测电路、转速与位置检测电路、CAN 接口电路等硬件电路等的工作原理,在搭建硬件平台的基础上开发了控制软件,使用embedded coder 将Simulink 模型转为C 代码,通过编译软件TASKING 生成hex 文件下载到电机控制器中。试验结果表明,该控制器可满足车辆使用环境需求,具有良好的动态性能。相关控制算法通过后续的参数标定和迭代优化,可在整车环境下能获得更优的动力性能。
