基于倾斜模型的高速公路边坡太阳能光伏场地测绘*
2023-11-09敖庭鹏李先会高雪芬
李 宏,敖庭鹏,叶 鑫,李先会,高雪芬
(1.中国电建集团昆明勘测设计研究院有限公司,云南 昆明 650031;2.云南建投第九建设有限公司,云南 保山 678000)
0 引言
2020年9月22日第75届联合国大会提出“碳中和”理念,主要途径是去除温室气体和使用可再生能源减少碳排放。我国也正式承诺“二氧化碳排放量在2030年前达到峰值,在2060年前实现碳中和”,所以新能源的开发利用是我国实现“碳中和”的重要举措[1-2]。而太阳能资源作为一种清洁、无污染的可再生能源,它有望成为减少石油、煤炭等不可再生资源消耗的途径之一,未来它将是能源结构重要的一环,太阳能资源的开发利用将成为一个重要的发展方向[3]。
高速公路作为现代社会不可或缺的交通途径[4],在我国分布较广,而公路边坡作为高速公路的一部分,通常在建筑密度较低的郊区、乡村、甚至未开发地区,其周围环境空旷,很少存在建筑物或树木遮挡的现象,拥有较大的表面和开放空间,有利于太阳能资源的开发利用,公路边坡的太阳能开发利用是将太阳能光伏板安装于公路边坡上,使太阳能转化为电能[5]。
为便于在公路边坡上设计太阳能光伏板铺设的大小、朝向以及倾斜角度,边坡的立面图和地形图是不可或缺的数据支撑。本文基于无人机倾斜三维模型,通过AutoCAD(以下简称CAD)软件,对边坡立面的形状、尺寸、坡度等进行了采集及表示,最终输出完整的边坡立面图。
1 技术路线
本文基于无人机倾斜摄影航飞数据,使用Context Capture Center软件实现高速公路边坡场景的实景三维模型自动构建,采用自主研发CAD软件插件将倾斜模型导入CAD中,在自定义用户坐标系的基础上,采集边坡的外观形态、坡度及高差,标注边坡立面尺寸及坡度,形成立面矢量成果,采用自主研发CAD影像插件将对应的正射影像图插入CAD成果中作为底图,输出完整的边坡立面图。图1为技术路线图。

图1 技术路线图Fig.1 Technical roadmap
2 数据预处理
2.1 无人机倾斜摄影三维模型的获取
无人机倾斜摄影系统以无人机飞行器为飞行平台,搭载多个摄像镜头,常见的1个正射镜头及前后左右4个倾斜镜头,可以同时获得5个方向的地面影像[6],并且无人机还搭载POS系统,在每组像片曝光的同时获得其对应摄影中心的位置与姿态信息。
Context Capture Center软件为倾斜数据处理中应用较广泛的软件[7]。首先加载倾斜影像数据和POS数据后自动进行多视影像密集匹配,精确完成在影像上转刺点后进行的联合平差;然后计算空三过程中每张影像的外方位元素,并且生成高密度、高精度的三维点云数据,在点云的基础上提取深度图并构建三维TIN;最后根据三维TIN的空间位置,截取影像进行自动纹理映射,从而快速得到实景三维模型。具体可分为数据预处理、空中三角测量和三维模型自动生成3个阶段。
2.1.1 数据预处理
利用Context Capture Center软件进行倾斜数据处理前,需准备的数据包括原始影像、POS数据、相机检校文件。首先要检查原始影像和POS数据是否有明显缺失,确认无误后打开影像数据检查其属性信息并查看是否有云覆盖,然后将5个镜头的原始影像分为5个文件夹存放,按统一的格式命名,保证每张照片都不重名[8]。原始POS数据的一条信息对应五镜头的一组照片,重新编辑POS格式,使每组照片对应一条POS信息。
2.1.2 空中三角测量
数据整理好后,在Context Capture Center软件中首先导入影像数据、POS数据和相机参数,数据导入时选择对应的坐标系统,提交自由网平差,进行影像密集匹配,完成相对定向[9]。然后导入外业测量的像控点坐标,在影像上对应的位置刺点,利用像控点对已有的区域网模型进行约束平差结算,将区域网纳入精确的大地坐标系统中,完成绝对定向。
2.1.3 三维模型自动生成
完成绝对定向后,得到所有影像的外方位元素及同名点,通过空三建立的密集点云构建三角TIN,利用三角TIN完成白模的制作,将影像纹理映射到白模上构建实景三维模型[10]。
实景三维模型不仅能直观反应实体建筑外部轮廓,还能真实还原体建筑的结构、尺寸、颜色、纹理等细节[11],因此基于实景三维模型可对公路边坡进行高度、长度、坡度的量测。
2.2 CAD倾斜插件的编写
近年来,由于智慧城市对城市建模三维化的需求,以及三维技术发展日趋成熟,倾斜摄影已成为智慧城市三维地理空间建模中快速成长的重要技术[12]。而作为专业设计软件,CAD当前尚不具备较好倾斜三维模型的导入、加载、辅助设计能力。在此背景下,自主研发了一个CAD倾斜模型插件。该插件能够将多层级倾斜三维模型加载到CAD中,实现对倾斜三维模型的多层级漫游、动态调绘等操作。
3 边坡数据的采集
3.1 定义用户坐标系
CAD提供了两套坐标系,固定坐标系的世界坐标系和可移动坐标系的用户坐标系(简称UCS)。UCS坐标系是一个工作坐标系,用户可以指定UCS以执行测绘任务,可以创建一个或者多个。UCS对于输入坐标,定义图形平面和设置视觉非常有用,且改变UCS并不改变视点,只改变坐标系的方向和倾斜度[13]。
边坡立面图主要是关注边坡的轮廓尺寸及相对位置,不是必须采用绝对坐标系,为了满足在不同平面上绘制边坡立面图的需求,本文采用UCS坐标系,基于边坡面调整坐标系的方向和倾斜度,进而更加方便、准确、快捷地完成边坡立面图绘制。
3.2 边坡立面数据的采集
公路边坡的外观形态、坡度、高差等因素都会影响边坡的稳定性[14],而公路边坡的稳定性决定边坡上能否铺设太阳能光伏板,因此在定义UCS坐标系的基础上,需要对边坡的外观形态、坡度、高差进行表示,以便设计人员判断此边坡上铺设太阳能板的可行性。
3.2.1 边坡外观形态的采集
根据外观形态和作用的不同,高速公路边坡防护多数采用框格梁和拱形格,框格梁一般用于边坡高度较高且地质条件较差的段落,采用钢筋混凝土浇筑而成;拱形格一般用于边坡坡度较缓且较稳定的段落,多数采用素混凝土浇筑而成[15]。所以在外部形态上,框格梁的稳定性高于拱形格,在采集边坡外部形态时应严格区分框格梁和拱形格。图2为边坡框格梁和拱形格的对比图。
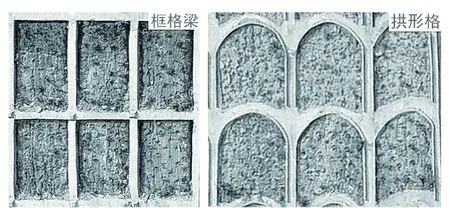
图2 框格梁和拱形格对比图Fig.2 Comparison between frame beam and arch grid
在采集边坡外观形态时,用二维多段线先采集边坡最外围轮廓,然后再采集框格梁和拱形格。其中,框格梁的外观形态主要为矩形,拱形格的外观形态主要为拱形,在采集拱形格时应注意直线、曲线和圆弧的切换,最大程度地在图上呈现出边坡真实的外观形态。需特别注意的是,边坡采集应量测地面高程值,若地面有植被遮挡,应参考植被高度减去相应的高程,尽量减小因植被造成的采集误差。
3.2.2 坡度及高差的采集
基于采集成果,为了方便判断边坡的高差,基于倾斜三维模型,在边坡立面的转角、高程变化明显的地方适当加注高程点。
在世界坐标窗口下,在边坡上画一条垂线垂直于边坡坡顶和坡脚,这条垂线的长度即为边坡坡顶到坡脚的水平距离(L),然后在三维模型上采集垂线两个端点的高程,两个端点高程的差值即为边坡的高差(H)。假设坡度为α,则tanα=H/L。按上述操作,得知此边坡的水平距离为79.5 m,高度为63.6 m,计算出边坡坡度为38.6°。
3.3 边坡标注
基于边坡立面采集成果,用CAD里的标注工具对边坡立面的外部轮廓、框格梁、拱形格的长度和宽度标注尺寸,同尺寸的标注一条边即可。标注边坡坡度时,以边坡坡顶为起点,坡底为端点,标注出计算出的坡度。
3.4 精度评定
为验证边坡采集成果的精度,在边坡采集完之后,在图上随机抽取边坡的若干条边,使用钢尺实地测量边坡边长,将测量结果作为已知长度,与图上抽取的边坡坡长进行对比,验证精度情况,精度对比分析表如表1。
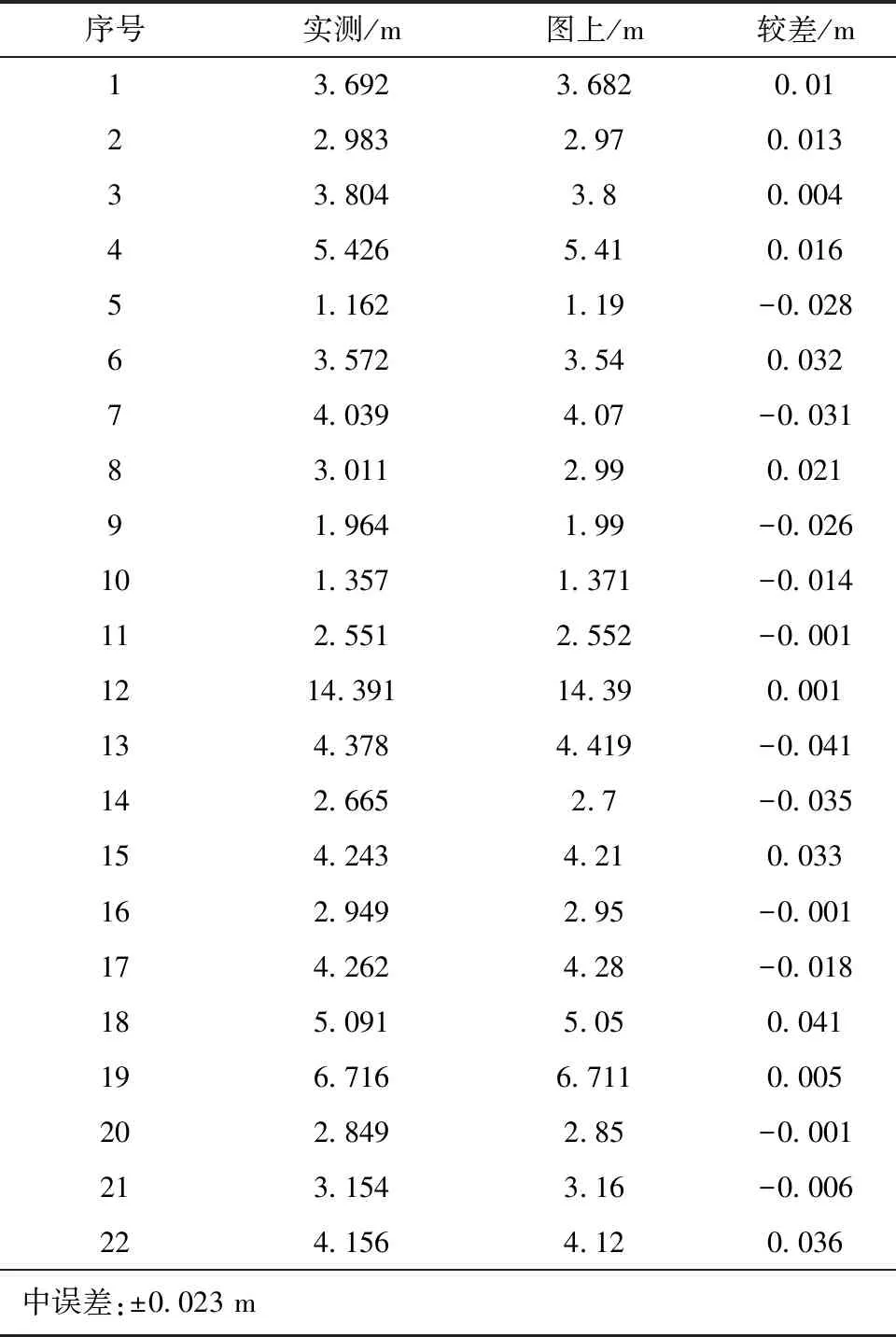
表1 边坡边长精度验证表
由表1可以看出,边坡成果精度满足规范要求。
4 成果输出
基于采集成果,采用自主研发插件将对应的正射影像图插入CAD成果中,图3为输出的边坡立面成果图。其中,正射影像为世界坐标,能展示边坡真实坐标及边坡真实面貌;立面正视成果图为UCS坐标系,能更好地呈现边坡立面形态,立面成果图中也展示了边坡坡度、高差、边坡尺寸等信息。

图3 边坡立面成果图Fig.3 Elevation results of slope
5 结束语
本文利用倾斜摄影技术在数据采集中的优势,以实景三维模型为基础,使用CAD软件进行边坡立面数据的采集,得到的成果数据图能直观、准确地反应公路边坡的形态以及尺寸,再结合正射影像信息即可判断出公路边坡的朝向以及公路边坡真实坐标位置,便于太阳能光伏板布设方案的设计及安装实施。
现阶段利用实景三维模型采集的边坡立面成果只能保证无植被覆盖的区域达到精度要求,因为目前的采集方式还不能剔除边坡立面上因植被覆盖造成的采集误差,对于有植被覆盖的区域并不能保证其精度,尤其是边坡立面上植被覆盖率在80%以上的,基本只能采集边坡的最外围轮廓,生成的边坡立面成果数据对太阳能光伏板的铺设参考意义也不大。