基于无人机遥感技术的城市三维建模研究
2023-11-09王艋张小宇刘松姚秀光
王艋, 张小宇, 刘松, 姚秀光
(1.杨凌职业技术学院,交通与测绘工程学院,陕西,杨凌 712100;2.中国长江三峡集团有限公司,湖北,武汉,430000;3.贵州省第一测绘院,贵州,贵阳 550025)
0 引言
城市三维建模是描摹城市地表景观的三维模型,用来表达城市空间信息[1]。以往大多采用人工测量的方式创建城市三维模型[2-3]。此类方式虽可在一定程度上控制所创建三维模型的精度,但人工成本较高,且过程烦琐,无法有效保证三维模型的效果[4]。为此,很多学者展开了相关研究。杜金莲等[5]提出了基于二维数字地图的城市三维建模方法,以二维地图颜色为依据,划分地物种类并提取边缘信息,结合距离测量算法生成城市三维模型。该方法虽可实现三维建模,但不能保障建模的精度。吕希奎等[6]研究了城市道路三维建模方法,运用CAD路网数据创建城市道路相关规则,实现大区域城市道路三维建模。此方法建模效率高,但所生成三维模型逼真性不够理想。
倾斜摄影技术能够从多个角度获得正摄与倾斜2种影像,为人们带来更贴近人眼视觉感的逼真空间[7-10]。为此,本文提出了基于无人机遥感技术的城市三维建模方法,利用无人机倾斜摄影遥感技术采集城市各角度影像,结合预处理与纹理映射等方法,构建高质量城市三维模型。
1 无人机倾斜摄影遥感技术的城市三维建模方法
1.1 无人机遥感技术的城市三维建模过程设计
本文设计的城市三维建模方法主要由数据采集、数据预处理、空中三角量测及纹理映射等部分构成。其原理是以所设计航线为依据,通过无人机采集具备旁向与航向重叠度的有序城市影像数据,恢复城市影像之间的立体关系,构建实景城市三维模型。建模过程如图1所示。

图1 城市三维建模过程图
据图1,整体建模过程描述如下。
1) 确定所需三维建模的目标城市以及格式、精度等任务需求,同时申请目标城市所属空域。
2) 依据目标城市区域高差、高程、面积等数据,选取恰当的无人机与相机,并以摄影基线的数量与长度为依据确定布设间距、像控点;以航行最低点分辨率与最高点重叠率都可达到测量需求为前提,设计无人机航线[11-12]。
3) 选取恰当的天气实施无人机作业,得到目标城市的正射与倾斜影像数据。
4) 对数据实施匀光匀色与畸变校正预处理后,获得高质量目标城市影像数据。
5) 通过3DS Max自动三维建模软件实施空中三角量测与纹理映射,生成目标城市的三维模型。
1.2 目标城市影像预处理
为了避免遥感技术所采集的影像数据存在色调与饱和度不均、畸变偏差等问题,选取Wallis滤波法匀光匀色,提高低反差区间的反差值,对匀光匀色处理后的影像进行畸变校正。经过以上两种预处理方式,获得了高清晰度、饱和度,色相及色度等更加均匀的高质量影像数据。将之用于三维建模中,可以让三角量测与纹理映射的精度更高,使最终构建的实验区域三维模型质量更高。
1.2.1 目标城市影像的匀光匀色处理
本文选用Wallis滤波法实施匀光匀色处理,统一目标城市影像的灰度均值与灰度方差,降低高反差区间的反差值,提高低反差区间的反差值,实现匀光匀色。该方法的滤波表达式为
(1)
式中,目标城市影像的亮度系数与反差扩展系数分别以d和a表示,无人机所采集到目标城市初始影像的灰度值以h(x,y)表示,经滤波之后的目标城市影像灰度值以hx(x,y)表示,参考影像与特定邻域内某像素的灰度均值分别以we与wh表示,二者的方差分别以ue与uh表示。
1.2.2 目标城市影像畸变的校正处理
对匀光匀色处理后的影像实施畸变校正处理。畸变包括切向畸变与径向畸变2种。径向畸变是在成像仪周边相机透镜所出现的弯曲,越接近成像仪周边,畸变越高,可通过l=0的泰勒级数实施定量描述,l代表像素与影像光学中心之间的间距。径向畸变的表达式为

(2)
式中,径向畸变参数以c1、c2、c3表示,成像平面上畸变点的初始位置以(x,y)表示,校正之后畸变点的位置以(xq,yq)表示。
切向畸变是影像平面同相机透镜之间无法平行而形成的弯曲,描述参数为q1和q2,表达式为

(3)
式中,影像中畸变像素点的初始位置与经过校正的位置分别以(x,y)和(xq,yq)表示。

(4)
通过式(4)得出像素点的实际位置,完成影像畸变的校正处理。
1.3 目标城市三维建模
将预处理后的影像输入3DS Max自动三维建模软件,构建目标城市三维模型包含空中三角量测与纹理映射两部分。空中三角量测借助PixelGrid系统得出精准外方位元素;通过3DS Max插件运用外方位元素结合共线方程生成基础三维模型,纹理映射通过共线方程得出纹理坐标,获得最终的城市三维模型。
1.3.1 空中三角量测的目标城市影像外方位元素确定
PixelGrid系统属于数字摄影量测系统,硬件的运算节点兼容性强、运算性能高且并行处理性优越。在空中三角量测处理之前,需准备预处理后的倾斜与正摄影像数据、无人机航线结合表(无人机型号、航行方向及航行线路索引图)、相机校验参数(像元、焦距、像主点坐标)。基于空中三角量测的影像外方位元素确定具体过程如图2所示。
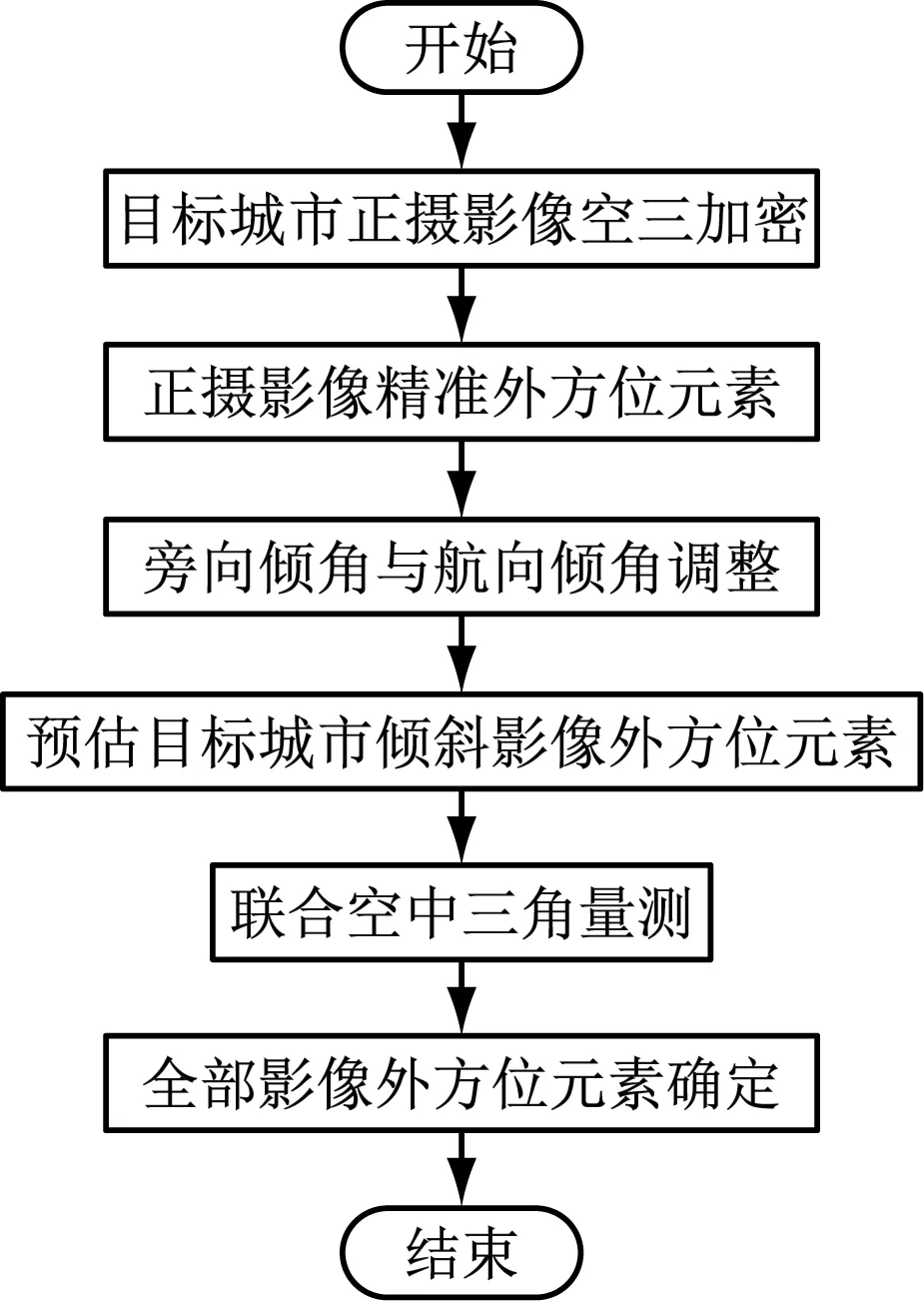
图2 空中三角量测的影像外方位元素确定过程
据图2,影像外方位元素确定的具体过程描述如下。
1) 通过PixelGrid系统对影像实施空三加密,得出外方位元素。
2) 在不更改经度、纬度及高程3个线元素的前提下,依据外方位元素与各个相机位置关系,降低或增加旁向与航向角度,预估外方位元素。
3) 以外方位元素为原始POS数据,导入PixelGrid系统内实施联合空中三角量测,得出全部影像的精准外方位元素。
1.3.2 基于纹理映射的目标城市三维建模
纹理映射具体过程如下。
1) 目标城市基础三维模型生成:结合外方位元素和共线方程,通过3DS Max插件和倾斜测量技术进行目标城市的多片立体测量,生成基础三维模型。共线方程是根据相机中心投影原理分析拍摄时的地面点、相机的像点以及投影中心之间的共线关系,得出共线方程表示为

(5)
式中,摄像站点的物方空间坐标以Xv、Yv、Zv表示,目标城市影像的内方位元素以x0、y0、g表示,相机像点的平面坐标以x、y表示,目标城市影像的外方位元素以θ、η、σ表示,三者依次代表航向角、旁向倾角以及影像倾角,三者方向余弦以fi、ki、pi表示。
2) 纹理映射:创建二维纹理空间点与三维空间城市表面点之间的关系,向三维空间城市表面映射二维纹理空间点的灰度值等,获取逼真的城市三维模型,提升模型的质量。在3DS Max插件中,采用网格对象形式管理三维目标城市的几何坐标。城市的各个面均对应一个纹理面,通过若干组索引向各个纹理面储存对应的纹理坐标;在三维目标城市的面顶点个数等于纹理顶点个数的情况下,各个面的纹理顶点依次对应坐标顶点。纹理映射的具体过程如下。
(1) 根据式(5),塑造物方坐标变换至目标城市影像坐标的关系,实现三维点坐标反向纹理映射。
(2) 设纹理坐标为(s,t),纹理空间是矩形域,其中0≤s≤1,0≤t≤1,各个点纹理坐标为

(6)
(3) 依据外方位元素,得出空间坐标系内影像空间点f(x,y),并构造该点同模型空间点C(X,Y,Z)的关系。
(4) 依据纹理坐标,得出其与C(X,Y,Z)的关系。
(5) 依据以上2种关系,将f(x,y)像素值作为纹理空间点(s,t),实现纹理映射,输出三维模型。
2 实验结果分析
以某城市的部分区域作为实验对象,创建该区域三维模型,检验本文方法的实际应用效果。实验中选取多旋翼无人机,并为其搭载5个采集各个方向影像数据的尼康D850数码相机。位于正中的相机对垂直方向的实验区域影像实施采集,周围4个相机设置不同方向45°倾角,采集倾斜方向的实验区域影像;并将1台GPS/IMU设备搭载于此无人机上,对正中位置相机曝光时的姿态与位置信息实施采集。
搭载后的无人机在飞行作业时设定其航行高度为110 m,旁向与航向重叠度分别为45%和68%,航摄影像分辨率设为0.04 m,倾斜与正摄相机的焦距分别为52 mm和36 mm。实验中共设计10条航行线路,共采集到实验区域正摄与倾斜影像700张,以其中1张正摄影像与2张倾斜影像(a、b)为例,呈现所采集的实验区域正摄、倾斜影像效果,如图3所示。

(a) 实验区域正摄影像
通过本文方法对图3中初始采集的3张实验区域影像实施匀光匀色处理,处理后的3张实验区域影像见图4。通过对比图4与图3可以看出,经由本文方法对初始采集的实验区域正摄、倾斜影像实施匀光匀色处理之后,显著提升了实验区域影像的清晰度,影像的饱和度、色相及色度等更加均匀,影像的整体质量更高。

(a) 实验区域正摄影像
在以上实验的基础上,运用本文方法生成实验区域基础三维模型,并对基础模型实施纹理映射后,所获得的最终实验区域三维模型如图5所示。通过图5可以看出,本文方法可实现实验区域的三维建模,且最终构建的实验区域三维模型质量高,具有较高的逼真度,本文方法的实际应用效果较为理想。这是因为本文选取Wallis滤波法匀光匀色,提高低反差区间的反差值,对匀光匀色处理后的影像进行畸变校正,获得了高清晰度的高质量影像数据,将之用于三维建模中,可以让三角量测与纹理映射的精度更高,从而提高了三维模型的质量。

图5 本文方法构建的实验区域三维模型效果图
3 总结
本文设计了基于无人机遥感技术的城市三维建模方法,通过无人机倾斜摄影遥感技术获得城市影像,对影像实施匀光匀色与畸变校正处理,输入3DS Max三维建模软件对影像实施空中三角量测与纹理映射,获得城市三维模型输出。实验结果表明,本文方法能够实现对所采集的实验区域全部影像的匀光匀色与畸变校正处理,处理后的影像清晰度更高,具有更均匀自然的饱和度、色相及色度等,影像内各个像素点的位置与实际位置相符,提升了影像的整体质量,运用处理后影像所构建的实验区域三维模型逼真自然,实际应用性强。
