基于多传感器融合的自动灭火系统设计
2023-11-08张钊左威景江姜一博李诚任四武程涛
张钊 左威 景江 姜一博 李诚 任四武 程涛

摘要:针对压裂井场作业设备密集、易发生大规模火灾的工况提出了一种基于多传感器融合的自动消防灭火系统。介绍了不同种类传感器的特性和功能,进行了有针对性的选择;基于透视变换原理进行图像型火焰探测器与双目相机的图像配准,使火焰探测与距离感知功能相结合,实现火焰的自动探测定位;通过对波段型火焰探测器、图像型火焰探测器的报警信息进行综合分析,确定多传感器融合报警的策略,提高报警准确率、减少误报;通过对水流落点与消防炮之间的距离以及对应消防炮的俯仰角度进行拟合,确定落点距离与俯仰角度的拟合关系用于消防炮转向时的俯仰角度计算;进行了多次场内实地测试,测试结果显示能够较好地扑灭不同位置的明火,灭火效果符合设计预期。
关键词:自动灭火;多传感器融合;图像配准
中图分类号:X913.4 文献标识码:A 文章编号:2096-1227(2023)09-0001-03
近年来,压裂井场消防管理体系和技术手段不断优化,从整体来看,井场各区域的消防水平都有了长足的进步,但依然存在很多问题,比如监控有盲区、现有灭火设施反应速度慢、灭火不精准等。因此,通过智能化技术手段实现消防灭火的自动化和智能化、大幅提升灭火效率的需求是非常迫切的。
消防炮是一种大空间的远程消防设备,以射流形式喷射灭火剂的装置[1]。按控制方式可分为手动消防炮、电控消防炮、液控消防炮等,随着科学技术的发展,目前市面上出现了一种自动跟踪定位射流灭火系统,是利用红外线、数字图像或其他火灾探测组件对火、温度等探测进行早期火灾的自动跟踪定位,并运用自动控制的方式来实现灭火的各种室内外固定射流灭火系统。该系统主要由探测组件、灭火组件及供液组件组成[2]。
国内外有很多学者对消防炮及相关组件进行了研究,孙靖对定流量消防水炮射流流场进行了数值模拟与轨迹研究,提出了一种基于空气阻力的射流轨迹理论模型,对空气阻力系数的组成进行了分析,以某种水炮进行了实验,验证了消防水炮射流轨迹模型和指数函数作为其系数拟合函数的正确性,但是只对喷嘴处的射流进行了数值模拟,简化了炮身和炮头模型[3]。陈川等设计了一种采用DSP和FPGA基于火焰识别与定位智能消防炮系统,给出了主要模块具体的硬件电路设计和程序的设计模块[4]。薛节着重研究了如何进行火灾探测及火源定位,在火灾探测方面进行了火灾识别相关算法的研究,为火灾探测的准确性可靠性提供了保障。在火源定位技术方面,研究了一种基于双目视觉的火源的定位方法,根据双目视觉的测距原理,通过视差,结合火焰质心坐标,进行三维建模,为大空间自动灭火建立了基础,但是并没有考虑可见光及烟雾等的影响,定位精度不高[5]。Chen等人基于一个安装在消防炮出口端的单目CCD相机进行火焰检测,依据消防炮转动角度对应图像特征在图像中的位移关系,结合相机焦距,利用三角几何关系对着火点进行空间定位[6]。
基于上述问题,拟设计一种自动化的灭火系统,以自动消防水炮为执行主体,结合点型多波段火焰探測器、图像型火焰探测器、双目摄像头等多传感器融合。根据火情发生的区域和火势大小,能够自动调节消防炮的水平角度和俯仰角度,从而实现更加快速精准地灭火,提升井场的智能化水平及消防管理能力,保障安全生产。
1 多种传感器类型介绍
1.1 点型火焰探测器
点型火焰探测器能够针对不同的波长频段进行检测,以达到尽早发现火灾隐患的目的,一般可分为单波段、红外、双波段红外、三波段红外、红紫外复合等多种类型[7]。
1.2 双目摄像头
双目摄像头的原理是利用左右2个摄像头,从不同的角度采集目标图像,通过模型构建和算法形成目标三维空间信息[8]。
1.3 图像型火焰探测器
图像型火焰探测器是以CCD或CMOS摄像机为探头,利用早期火灾烟雾的图像特征及近红外辐射的特性来实现早期火灾的预警。同时,通过对火焰特征的提取,可以输出火焰中心点在图像中的位置,从而能够快速实现火灾视频采集获取、火灾分析预警等[9]。
2 设计方案
2.1 整体布局方案
为使图像型火焰探测器与双目摄像机的安装位置相对固定,设计专用工装安装固定一个图像型火焰探测器与一个双目摄像机,双目摄像机与图像型火焰探测器视野范围尽可能重合,将该专用工装分别固定到1、2位置点。
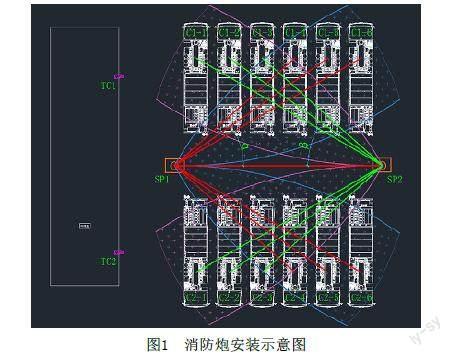
图1为井场布局示意图,TC1、TC2位于井场水罐上方位置,TC1、TC2处各放置一个探测定位传感器组,本设计中探测定位传感器组中包含一个波段火焰探测器、一个图像型火焰探测器与一个双目摄像机,为使探测定位传感器组中各传感器的安装位置相对固定,设计专用工装安装固定传感器。
消防炮安装在井场的高低压管汇橇上,通过供水泵为系统供水。井场中使用2个消防炮,图1中SP1与SP2点处为消防炮1与消防炮2的安装位置,C1-1—C1-6、C2-1—C2-6处为两排压裂车,消防炮覆盖范围可以采取远端覆盖与近端覆盖2种方式,本设计采用远端覆盖的方式进行喷水灭火。
2.2 多种火焰探测确定火情逻辑
使用波段火焰探测器与图像型火焰探测器探测火焰,波段火焰探测器输出是否存在火焰的开关量,图像型火焰探测器输出标识火焰的图像。为了解决不同探测器灵敏度差异以及尽可能的消除误报率,可能会存在以下几种探测结果,分别采取不同的策略应对[10]:
一是2种探测器都发现火情:当波段型火焰探测器探测到火焰后发出可能发生火灾的开关量,一段时间内图像型火焰探测器探测到火焰,进一步计算火焰的空间位置坐标。
二是波段型探测器报警,图像型探测器不报警:当波段型火焰探测器探测到火焰后发出可能有火的开关量,一段时间内图像型火焰探测器没有探测到火焰,则在界面系统中进行报警提醒,提醒工作人员通过监控画面或者现场查看确定是否真实存在火情。
2.3 多传感器融合计算火焰的空间坐标
2.3.1 同位置图像型火焰探测器与双目摄像机的图像配准
通过图像配准可以对不同位置的图像型火焰探测器与双目摄像图像进行匹配对齐,获得2幅图像在空间位置的对应映射关系,图1中同一专用工装内的图像型火焰探测器与双目摄像机进行图像配准,选择基于特征的图像配准方法,步骤包括特征提取、特征匹配、计算变换模型。
2.3.2 计算着火点相对于统一坐标系的空间坐标
图像型火焰探测器探测到火焰后,输出火焰在探测器图像中的像素点坐标,通过配准后的位置变换模型计算火焰点在双目摄像机图像中的像素点坐标,利用双目摄像机测量得到着火点相对于该双目摄像机坐标系的空间坐标(X',Y',Z'),基于双目摄像机的坐标系转换矩阵得到着火点在同一坐标系下的空间坐标(X,Y,Z) 。
2.3.3 计算着火点相对于消防炮的空间坐标
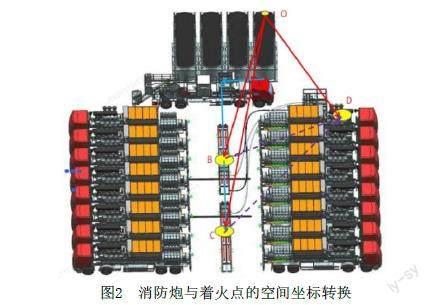
图2中O点为摄像机统一坐标系的位置,其他位置的双目摄像机坐标系统一到该坐标系下,B、C点处为消防炮的位置,D为双目摄像机探测到的着火点位置,着火点在摄像机统一坐标系下的空间坐标记作(X,Y,Z),计算消防炮在摄像机中的空间坐标的方式为:深度图、点云图上点选2个消防炮位置,读取2个消防炮在摄像机统一坐标系的空间坐标。
2个消防炮的空间坐标,分别记作(X1,Y1,Z1),(X2,Y2,Z2),、为着火点相对于B、C消防炮的空间坐标,,即 (X-X1,Y-Y1,Z-Z1),同理,即(X-X2,Y-Y2,Z-Z2),本设计选择消防炮远端覆盖的方式,图2中B消防炮距着火点D的距离比C消防炮距着火点D的距离远,选择用消防炮B对着火点D进行喷水灭火,图2中为消防炮到着火点的空间向量。
2.3.4 消防炮与着火点的坐标、角度转换
设定消防炮炮筒水平、俯仰的初始角度,对消防炮到着火点的空间向量(X,Y,Z)进行向量分解得到水平、俯仰角度α、β,水平角为:
俯仰角为:
3 全系统联合测试
为了拟合出水炮的俯仰角与喷水落点距离关系的关系式,在测试环境下进行多项数据标定测试,经过多次试验测试,选出一组较符合实际情况的数据,如表1所示。
经过实际测试对比分析,發现二次拟合曲线与实际情况最符合,因此采用二次方程拟合。
4 结论
本设计提出了基于多传感器融合的自动灭火技术,通过多传感器融合实现火源的自动识别和定位,控制系统将计算后的旋转角度下发给消防炮,消防炮通过自身的运动部件完成转向灭火,实现了消防炮灭火的自动化与智能化。
①基于透视变换原理进行图像型火焰探测器与双目相机的图像配准,使火焰探测与距离感知功能相结合,实现火焰自动探测定位。
②通过对波段型火焰探测器、图像型火焰探测器的报警信息进行综合分析,确定多传感器融合报警的策略,提高报警准确率、减少误报。
③通过对消防炮水流落点与消防炮之间的距离以及对应消防炮的俯仰角度进行拟合,确定落点距离与俯仰角度的拟合关系用于消防炮转向时的俯仰角度计算。
通过理论计算分析与实际联调测试,证明了本方案是切实可行且具有较好自动灭火效果的。本方案能够改善压裂井场安全现状,提升井场消防灭火的安全保障能力,保护井场作业人员的安全性。接下来,需要进一步完善算法的可靠性及稳定性,持续进行系统的功能优化和性能提升,以满足产品大规模市场推广的要求。
参考文献:
[1]程宏伟,刘德明,黄文忠.浅析消防炮灭火系统的应用[J].福建建设科技,2011(1):5-7.
[2]齐欣,杨丙杰,杨琦.自动跟踪定位射流灭火系统应用技术分析[J].消防科学与技术,2022,41(7):951-953.
[3]孙靖.定流量消防水炮射流流场数值模拟与轨迹研究[D].秦皇岛:燕山大学,2018.
[4]陈川,邓成中,武昕坤,等.基于火焰识别与定位的智能消防炮系统设计[J].消防科学与术,2015,34(9):1207-1209.
[5]薛节.图像型火灾探测及火源定位系统的研究与实现[D].上海:东华大学,2015.
[6]Chen T,Yuan H Y,Su G F,et al.An automatic fire searching and suppression system for large spaces[J].Fire Safety Journal,
2015,39(4):297-307.
[7]毕振波,乐天,潘洪军,等.图像型火灾探测预处理方法综述[J].消防科学与技术,2016,35(1):87-91.
[8]丁国绅,乔延利,易维宁,等.基于光谱图像空间的改进SIFT特征提取与匹配[J].北京理工大学学报,2022,42(2):192-199.
[9]周正平.自动跟踪定位射流消防炮系统设计[D].西安:西安电子科技大学,2015.
[10]龙勇志.红外与可见光图像配准与融合算法研究[D].成都:电子科技大学,2020.
Design of automatic fire extinguishing system based on multi-sensor fusion
Zhang Zhao1, Zuo Wei1, Jing Jiang1, Jiang Yibo2, Li Cheng2, Ren Siwu1, Cheng Tao1
(1. Downhole Operation Company of China National Petroleum Corporation Western Drilling Engineering Co., Ltd., Xinjiang Karamay 834000;
2. Yantai Jereh Petroleum Equipment Technology Co., Ltd., Shandong Yantai 264000)
Abstract: An automatic fire extinguishing system based on multi-sensor fusion is proposed for the working conditions of intensive fracturing well site equipment and prone to large-scale fires. The characteristics and functions of different types of sensors are introduced, and targeted selections are made. Based on the principle of perspective transformation, the image registration between the image flame detector and the binocular camera is carried out, and the flame detection and distance sensing functions are combined to realize the automatic detection and positioning of the flame. Through the comprehensive analysis of the alarm information of the band flame detector and the image flame detector, the multi-sensor fusion alarm strategy is determined to improve the alert accuracy and reduce false alarms. By fitting the distance between the water drop point and the fire gun and the pitch angle of the corresponding fire gun, the fitting relationship between the drop point distance and the pitch angle is determined for the calculation of the pitch angle when the fire gun is turned. A number of field tests were carried out, and the test results showed that the open flames at different locations could be well extinguished, and the fire extinguishing effect was in line with the design expectations.
Keywords: automatic fire extinguishing; multi-sensor fusion; image registration
