基于YOLOv4目标检测算法的城市轨道交通刚性接触网悬挂状态智能检测系统的设计与应用*
2023-11-07马志鹏袁万全周于翔魏志恒
马志鹏 袁万全 周于翔 魏志恒
(1.中国铁道科学研究院, 100081, 北京; 2.中国铁道科学研究院集团有限公司城市轨道交通中心, 100081,北京∥第一作者, 硕士研究生)
刚性接触网长期工作在振动环境中,其零部件易出现脱落、缺失、断裂等典型病害,如果不及时处理,将引发严重的弓网故障,给线路运营带来安全隐患[1]。刚性接触网结构型式多样,一般由悬挂系统、汇流排及接触线等部分组成[2],其中悬挂系统是刚性接触网的重要组成部分。目前,对接触网悬挂状态的检查主要依赖于天窗期内人工登梯定期巡视,具有故障隐患发现不及时、工作效率低、强度大等缺点。随着近年来机器视觉技术的不断发展,采用视觉成像技术进行接触网巡检成为一种有效的手段[3]。
本文简述了YOLOv4目标检测算法,并将该算法应用于城市轨道交通(以下简称“城轨”)刚性接触网悬挂状态检测中,分析了该算法在城轨线路中的实际应用效果。
1 YOLOv4目标检测算法
目标检测是计算机视觉中的重要分支,广泛应用于图像分割、物体追踪及关键点检测等任务[4]。YOLO是目标检测算法中应用比较广泛的一种,YOLOv4则是在原有YOLO目标检测架构的基础上,在加强特征提取、增强网络模型非线性、防止过度拟合等方面进行了优化[4-5]。
1.1 YOLOv4目标检测算法网络
本文使用的YOLOv4目标检测算法网络(见图1)主要包括输入模块、主干网络模块、颈部网络模块及预测输出模块。
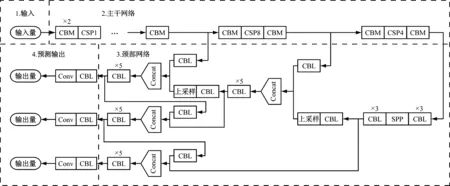
注:CBM、CBL为该网络结构中的最小组件,不同在于其激活函数分别为Mish和Leaky relu;CSPx为卷积层和残差组件组成的网络结构;SPP为空间金字塔池化模块;Conv为卷积模块;Concat为张量拼接模块;“×2”“×3”“×5”分别代表2次、3次和5次运算。
其中,YOLOv4目标检测算法网络将特征提取网络CSPDarknet53作为其主干网络,在该主干网络与预测输出模块之间设置颈部网络模块,包括SPP模块和PANet(路径聚合网络)。另外,预测输出模块使用YOLOv3结构,详见文献[5]。
1.2 YOLOv4目标检测算法的优点
YOLOv4目标检测算法具有一系列优点,在刚性接触网悬挂状态检测系统的应用中体现出良好的应用效果。
1) YOLOv4目标检测算法采用了Mosaic数据增强方式。相较CutMix数据增强方式,Mosaic数据增强方式选取了4张图片通过随机缩放、裁剪等方式进行拼接,变相提升了单次训练抓取的样本数量,大大丰富了检测数据集,具有明显的优势。图2为不同方法下刚性接触网悬挂状态的使用效果对比图。

a) 原始图片
2) YOLOv4目标检测算法的另一个创新在于对骨干网络的改进。该算法使用的CSPDarknet53特征提取网络,是在YOLOv3 Darknet53网络结构的基础上引入了CSPNet跨阶段局部网络,在占用更小内存的同时保证了计算的速度与精度。
3) YOLOv4使用平滑连续的Mish激活函数,相比于传统的Leaky relu激活函数具有显著的优势[6]。除此以外,YOLOv4目标检测算法还采用了DropBlock的正则化方式[7]。传统的Dropout方式被广泛应用于全连接层的正则化技术,但对于卷积层的处理效果较差。DropBlock方式将特征图连续区域的单元进行丢弃,准确性更高。图3为不同方法下刚性接触网悬挂状态检测数据处理效果对比图。

a) 原始图片
4) YOLOv4的颈部网络采用PANet结构,且在FPN(特征金字塔网络)的基础上进行了加强。该颈部网络包含自上向下和自下向上两种路径。
2 基于YOLOv4目标检测算法的刚性接触网悬挂状态智能检测系统
2.1 系统架构
基于YOLOv4目标检测算法的刚性接触网悬挂状态智能检测系统(以下简称“基于YOLOv4的刚性接触网悬挂状态智能检测系统”)选择以工程车或列车为载体,由高清成像模块与数据管理分析模块组成,其总体架构如图4所示。
现在,网络上的骗子太多,相信我们的作者有足够的智慧去辨别,如果你们不幸被骗、或者怀疑被骗,请及时与我们联系核实,从而减少损失。为此,特别声明,请读者、作者按照正确的投稿渠道投稿,否则,我们不承担由此带来的任何法律责任。
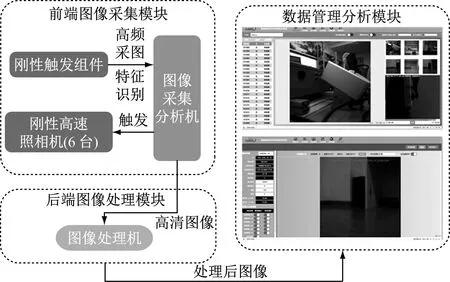
图4 基于YOLOv4的刚性接触网悬挂状态智能检测系统总体构架
2.1.1 高清成像模块
高清成像模块包含触发装置、高速照相机及补光设备等,采用数字激光、光电测量等技术,使用高性能、低功耗的电路板设计,控制补光灯工作及巡视照相机、刚性拍摄照相机拍摄,通过实时获取的里程信息,并匹配基础数据中的杆号信息,形成一杆一档并分组存储。
触发装置用于对定位点设备进行定位并输出触发信号。该装置由激光发射器、刚性触发照相机构成。工作时,激光发射器垂直向上发射高亮激光,在接触网上形成1条高亮的激光轮廓(见图5),刚性触发照相机将成像数据实时传递到图像分析服务器中,服务器经图像识别给巡视照相机、刚性拍摄照相机及补光设备输出触发信号。

图5 接触网激光轮廓
刚性悬挂检测设备的车顶采集单元由1台巡视照相机和6台刚性拍摄照相机组成,对接触网及刚性悬挂零部件进行实时检测。图6为基于YOLOv4的刚性接触网悬挂状态智能检测系统车顶布置图。
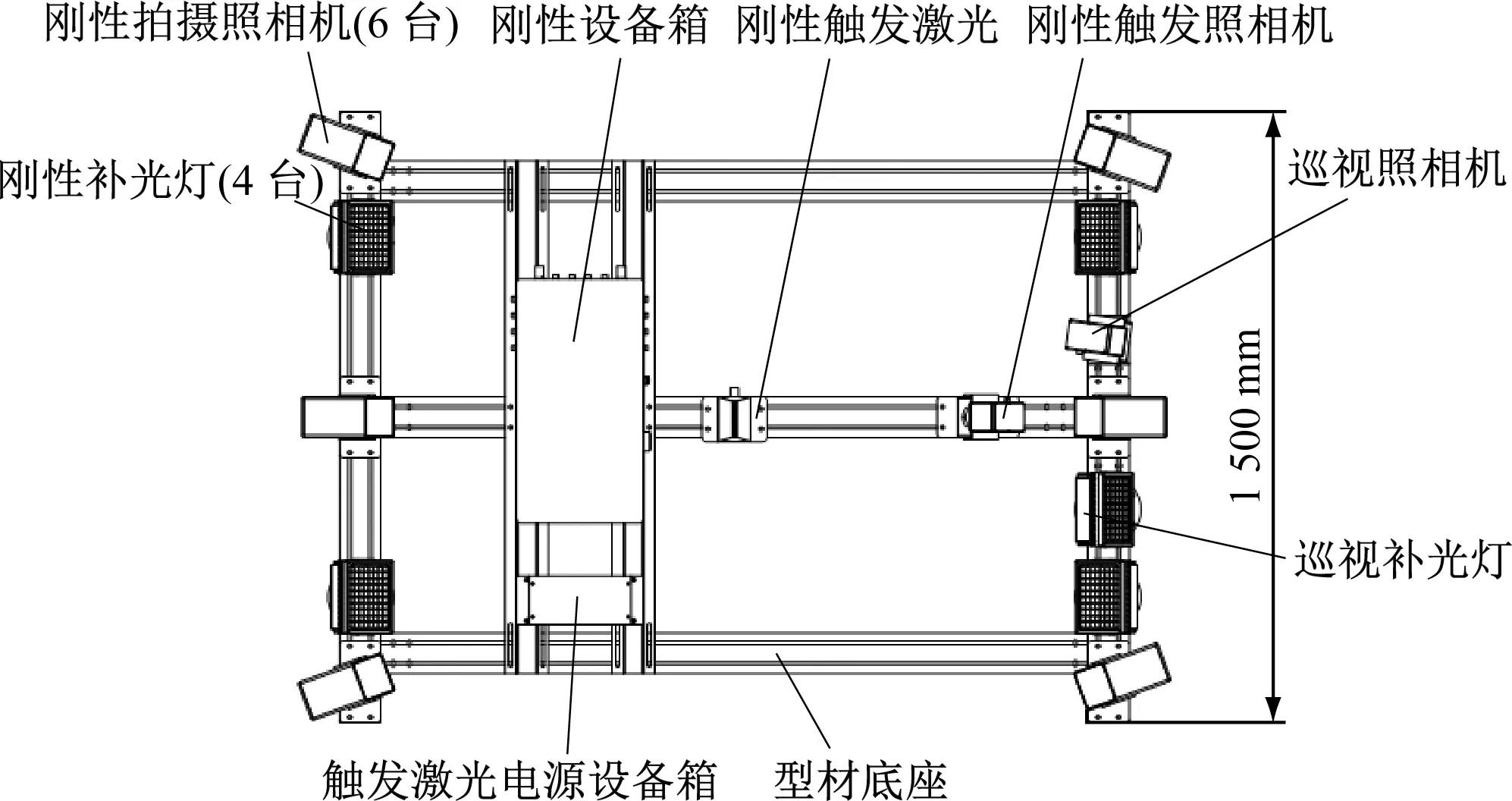
图6 基于YOLOv4的刚性接触网悬挂状态智能检测系统车顶布置图
2.1.2 数据管理分析模块
数据管理分析模块可实现对检测数据的治理与深度应用,提升检测分析效率。该模块主要具有基础数据管理、检测数据管理、检测数据分析及检测设备管理等功能。
其中,检测数据分析单元采用YOLOv4目标检测算法对检测数据进行缺陷识别和处理,以及数据统一及标准化,在此基础上实现不同时段拍摄的接触网数据的比对,进而开展关联分析、对比分析等多维度可视化分析,最终依据分析结果与标准实现对线路健康状态的综合评价,为线路安全评估以及日常检修维护提供数据支持。
2.2 系统的技术参数
基于YOLOv4的刚性接触网悬挂状态智能检测系统,使用残差网络提取对象特征,将Mish作为激活函数,能够解决接触网零部件种类、数量众多以及不同导线高度造成的提取对象特征困难等问题。基于YOLOv4的刚性接触网悬挂状态智能检测系统的技术参数如表1所示。
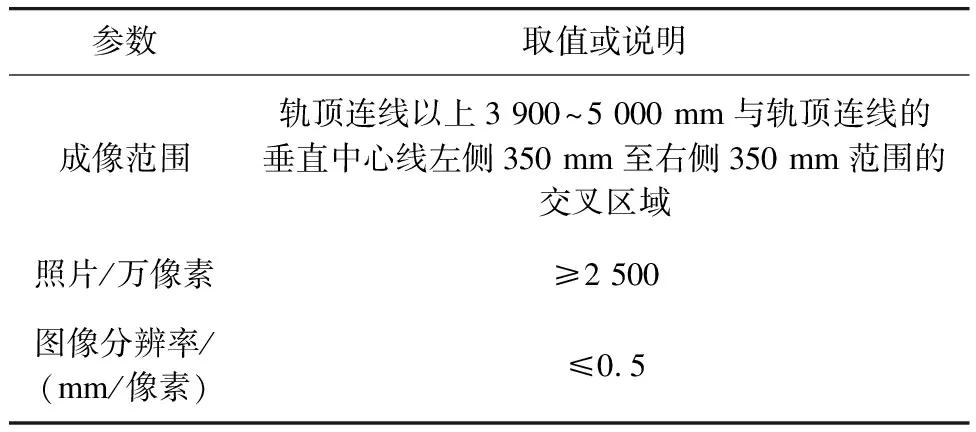
表1 基于YOLOv4的刚性接触网悬挂状态智能检测系统的技术参数
基于YOLOv4的刚性接触网悬挂状态智能检测系统可实现对刚性接触网的快速巡检,检测范围覆盖行车沿线的所有接触网设施。基于YOLOv4的刚性接触网悬挂状态智能检测系统拍摄的刚性接触网视野分析图如图7所示。
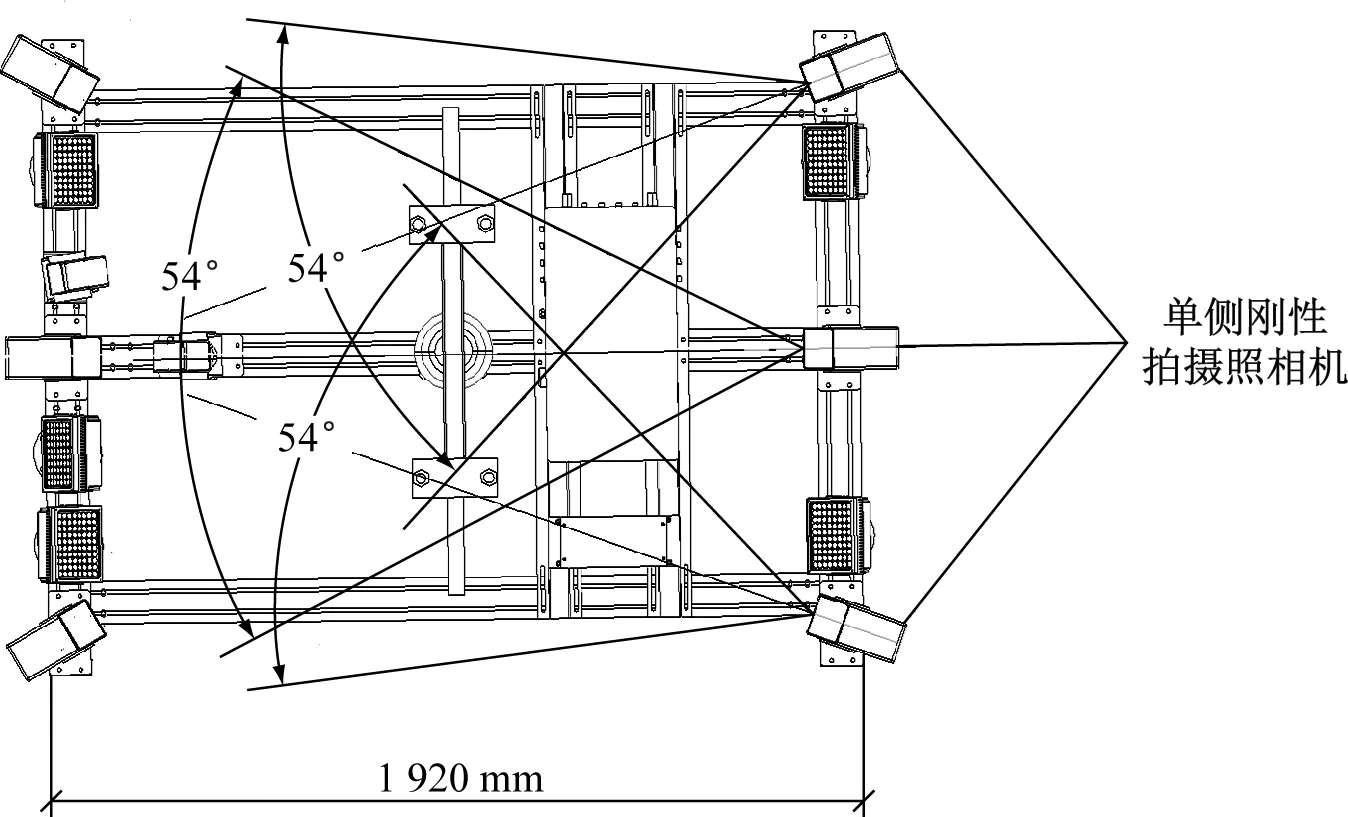
a) 俯视图
由图7可知,基于YOLOv4的刚性接触网悬挂状态智能检测系统可全面覆盖刚性接触网各零部件视角,实现对其悬挂状态的全面高清成像。
3 基于YOLOv4的刚性接触网悬挂状态智能检测系统应用分析
城轨领域并未具备较为成熟的刚性接触网悬挂状态检测手段,也无相应的标准和规范。在此背景下,本文将YOLOv4目标检测算法应用于城轨刚性接触网的悬挂状态检测。以北京地铁某线路为例,基于YOLOv4的刚性接触网悬挂状态智能检测系统相比传统刚性接触网悬挂状态检测系统检测精度更高,能够检测出一些不易发现的零部件悬挂状态病害问题。图8为基于YOLOv4的刚性接触网悬挂状态智能检测系统识别的刚性悬挂零部件病害。

图8 基于YOLOv4的刚性接触网悬挂状态智能检测系统识别的刚性悬挂零部件病害
基于YOLOv4的刚性接触网悬挂状态智能检测系统具有如下技术优势:
1) 便于统计分析:从缺陷案例、线路里程等多种维度,结合各期检测数据及线路基础设施进行统计,基于YOLOv4的刚性接触网悬挂状态智能检测系统的检测精度更高,且能够从不同维度发现问题的分布特点。
2) 便于对比分析:基于YOLOv4的刚性接触网悬挂状态智能检测系统可以将同一类型设备两次或多次的检测数据,或不同类型设备数据进行叠加对比分析,同时可以计算同一杆一档数据的差异,以及发现数据异常变化,以指导设施设备养护维修工作。
截至目前,基于YOLOv4的刚性接触网悬挂状态智能检测系统于北京地铁某线已发现各类故障隐患近百处,为线路运营安全提供了极大的保障。基于YOLOv4的刚性接触网悬挂状态智能检测系统识别的系列病害如图9所示。

a) 螺栓松动故障
4 结语
伴随着城轨线网规模的不断扩大以及设计速度的不断提高,以小型设备和人工目视检查为主的检测方式已经不能满足城轨的检测需求[8]。本文将YOLOv4目标检测算法应用于刚性接触网悬挂状态检测系统,取得了良好的检测效果。该系统的应用将有效提高检测精度,节省人力、物力成本,推进基础设施智能运维体系建设,推动城轨基础设施运维工作由计划修向状态修的转变,同时协助运营单位构建形成专业数据资产,实现数据的规范化管理和智能化应用。
