基于激光点云数据的城市轨道交通限界侵限判别算法*
2023-11-07赵正阳张梓鸿黄慧昌麻全周
赵正阳 张梓鸿** 黄慧昌 麻全周 李 洋
(1.中国铁道科学研究院集团有限公司城市轨道交通中心, 100081, 北京;2.天津智能轨道交通研究院有限公司, 301700, 天津∥第一作者, 助理研究员)
我国城市轨道交通(以下简称“城轨”)线路因建设年代不同,部分线路设计之初未考虑互联互通性问题,使得各条线路间基础设施形式、受电形式、通信信号设备及车辆性能等方面往往存在较大差异,导致各条线路间限界条件有所不同,这为不同线路间互联互通工作的开展带来较大的困难[1]。
限界检测是进行互联互通的基础,目前激光扫描法是轨道交通限界检测中应用最为广泛的方法,即采用图形处理技术对扫描结果进行处理得到设备限界图像,该方法在实际应用中取得了良好的效果[2-10]。文献[7-10]根据获得的设备限界数据,对设备限界侵限判别进行了研究,当前采用的限界判别方法主要以水平射线法为主[11],即将设备限界激光点云数据进行渲染后,将其与车辆限界模型进行对比,通过求解激光测点的水平线与多边形各边的交点数量,判断测试断面是否存在激光测点侵限的情况。该方法原理简单,物理意义明确,在大多数场景下具有较高的判断精度,且在当前大多数软件平台中存在成熟的程序包可供调用。但该方法只能进行是否存在超限情况的单向判断,无法对超限程度和未超限裕度进行定量化描述,不利于开展精细化的限界健康管控工作。上述文献针对设备限界自身是否存在超限问题进行了诸多研究,但未见对设备限界与车辆限界的匹配(或超限)研究。基于以上调研可知,当前对于限界问题的研究难以完全满足城轨车辆跨线运行需求。
本文基于360°激光扫描仪数据,以及计算几何中采用向量积法确定点与多边形平面位置关系的判别思路,提出了一种基于激光点云数据的城轨限界侵限判别算法,并依托OpenCV软件实现了不同型号车辆在不同线路中限界侵限的精准、高效、自动化判别。本算法在北京地铁线路上实现了应用,且取得了良好的应用效果,该算法的提出可为城轨车辆跨线运行和不同线路互联互通工作的开展提供良好基础。
1 城轨限界检测数据采集
限界检测设备采用型号为PENTAX S2100的相位式激光扫描仪,该设备内置的旋转镜头在工作过程中进行360°高速旋转对目标物体发射激光,其扫描速度高达200 r/s且高于100万点/s,可以实现密集断面的高精度、高密度扫描。当激光束到达目标物体后向各方向散射,部分散射光返回到传感器接收器,通过光脉冲发出至返回被接收所经历的时间和激光传播速度即可测定传感器扫描中心至目标物体的距离。
将扫描的断面数据实时传输至计算机,由检测软件对接收到的断面数据进行分析处理[12]。根据钢轨特征识别出钢轨坐标位置,以钢轨顶面连线中点(轨距中心点)为原点,构建以钢轨顶面连线为横轴、垂直于钢轨顶面连线为纵轴的直角坐标系(基准坐标系),并将断面数据自动转换至该坐标系内。如图1某隧道断面扫描轮廓所示,隧道断面轮廓扫描数据最终以(x,y)的形式呈现,x、y值分别代表扫描点在上述坐标系内水平和竖直方向的坐标。为了有效节约数据储存空间、提高存储速度,检测数据按照表1的编码结构形式以二进制方式进行存储。
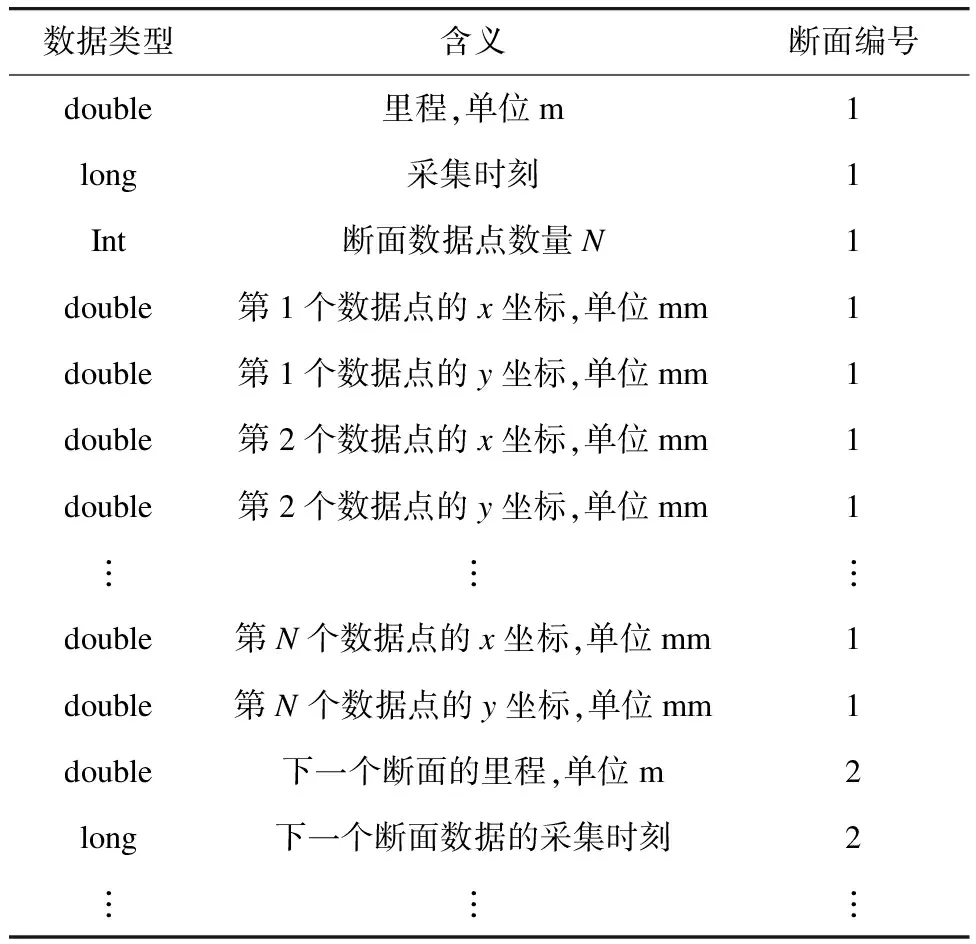
表1 某隧道断面轮廓数据编码结构
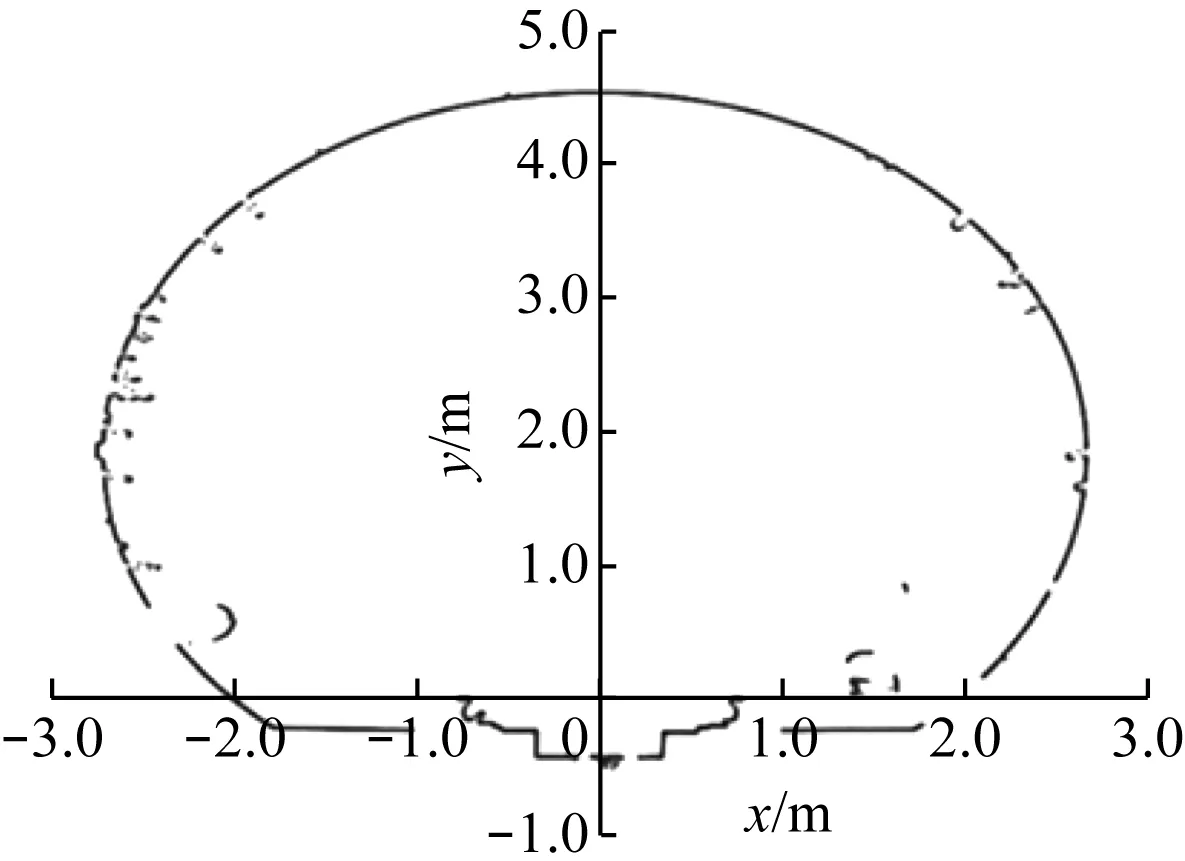
图1 某隧道断面轮廓
车辆限界数据是在车辆轮廓尺寸的基础上,考虑了由车辆和轨道的公差、磨耗、弹性变形及车辆振动等因素而产生的车辆各位置横向和竖向动态偏移后的统计轨迹。其限界关键点的具体坐标信息根据CJJ/T 96—2018《地铁限界标准》中的规定进行确定;车辆限界数据以上述基准坐标系为基准,以点坐标(x,y)的形式进行呈现。
2 城轨设备限界与车辆限界匹配算法研究
2.1 检测数据预处理
城轨线路在空间上呈现典型的线状分布,加之激光扫描设备具有高频率、高密度的工作特点,因此设备限界检测数据的体量较为巨大。为有效降低侵限判别工作的数据量,本文采用以下两种方法对检测数据进行预处理。
通过对多条城轨线路进行限界数据分析发现,在基准坐标中纵坐标500 mm以下位置通常会出现大量的异常数据。通过分析发现该区域异常数据主要由以下两种情况导致:①列车正常运行时车轮与钢轨处于紧密接触状态,车辆运行过程中出现抖动容易导致钢轨侵入车辆底部限界;②对于第三轨供电的运营列车,采用转向架处伸出的受流器通过滑靴与第三轨接触而取得电能,因此该类型车辆的限界在受流器位置明显突出,导致第三轨及其附属设备无法避免地侵入车辆受流器位置的限界。
实际上,以上两种侵限情况均属于正常侵限,不影响行车安全,因此需要采用合理的方式对其进行预处理。经过分析发现,上述侵限点的纵坐标基本分布在基准坐标系中纵坐标500 mm以下的位置,因此,在侵限判别前过滤掉纵坐标小于500 mm的检测数据。其计算流程如下:
定义检测数据集U={(x1,y1),(x2,y2),…,(xn,yn)},其中(xi,yi)∈U;剔除U中yi<500 mm的点坐标数据,得到新数据集U1,该数据集中yi≥500 mm。剔除处于车辆限界最小外接矩形之外的数据,对于车辆限界的外部区域,检测点只有明显靠近车辆限界时才会出现侵限的风险;对于远离车辆限界的检测点,其产生侵限的概率极低。因此,选取一个合理的区域对监测数据集进行剪枝处理,可极大地降低侵限判别的数据量,从而有效提高该算法的计算效率和精度。
对多条城轨线路进行侵限分析时,通过仅保留车辆限界最小外接矩形内数据的方式可以较好地对检测数据进行过滤,在最小外接矩形外的数据可以直接判断为该数据点未侵限。该方法可以有效降低数据体量,且不会出现过处理的情况。其计算流程如下:
在基准坐标系内,找出车辆限界横坐标的最大值xmax和最小值xmin,以及纵坐标的最大值ymax,通过(xmax,ymax)与(xmin,500 mm)两点做出该车辆限界的最小外接矩形(见图2)。在数据集U1中,保留xmin 图2 车辆限界的最小外接矩形 通过对多条线路的车辆限界数据进行分析,发现采用以下两种方法对检测数据进行预处理后,可以有效过滤掉95%以上侵限判别的数据。 限界匹配算法共包含3个过程:采用向量积法对经过预处理数据集U2内的检测数据与车辆限界位置关系进行判断,筛选出位于车辆限界内部的侵限点集U3;对数据点集U3进行离散点与连续点判断,剔除干扰计算的异常点数据后得到数据集U4;对数据集U4中的侵限数据点进行侵限幅值计算。 2.2.1 侵限点判断的基本原理与算法实现 在判断检测点与多边形位置关系的方法中,射线法相对判断规则简单、易于理解,目前被学者广泛应用。但该方法需要进行大量的求交计算,总体计算量相对较大,同时对于交点位于多边形顶点时会出现误判的情况。为科学、高效地实现限界侵限判别计算,本文将利用矢量积的方式计算向量与多边形交点的数量,同时通过交点个数的奇偶性来判断检测点与多边形的位置关系。叉乘运算的几何意义参考文献[13]。 侵限判别的具体计算步骤如下: 如图3车辆侵限判别示意图所示,定义P为需要判断的断面点,Q为点P在x轴正方向延长线上的点;V={v1,v2,…,vm}为车辆限界点;m为车辆限界点数量;(xP,yP)为点P的坐标,(xQ,yQ)为点Q的坐标,其中xQ大于车辆限界横坐标的最大值;(xvi,yvi)为点vi的坐标,其中vi∈V,1≤i 图3 车辆侵限判别示意图 设t1=lPQ×lPvi,t2=lPQ×lPvi+1,t3=lvivi+1×lviP,t4=lvivi+1×lviQ。矢量积结果分析如下: 1) 满足t1t2>0,或者t3t4>0,则可判定线段vivi+1与线段PQ无交点。 2) 满足t1t2<0,且t3t4<0,执行C=C+1。 3) 满足t1和t2其中一个为0,另一个不为0,则可判定线段PQ穿越其中一个顶点。然后判断该顶点的两相邻顶点是否在线段vivi+1两侧:如果在线段vivi+1两侧,则执行C=C+1;如果在线段vivi+1同侧,则C计数不变。 4) 满足t1t2<0且t3=0,则可判定点P在线段vivi+1上,记res=0,终止判断。 5) 满足t1t2=0且t3t4=0,线段vivi+1与线段PQ共线,但点P是否在线段vivi+1上还需进一步判断。如果xP处于xvi与xvi+1之间时,则可判定点P在线段vivi+1上,记res=0终止判断;如果xP 当C为奇数时,res=1;当C为偶数时,res=-1。实际检测点与多边形空间的位置关系如图4所示。 图4 检测点与多边形空间的位置关系 采用以上方法对经过预处理的数据集U2内的检测点与车辆限界位置关系进行判断,从而筛选出位于车辆限界内部的侵限点集U3。 2.2.2 异常点判断 由于异物、灰尘、车辆抖动等诸多干扰原因,在隧道限界检测数据中会产生相应的干扰数据。干扰数据点通常呈现离散分布和小聚集性等特点。为有效判断各检测点之间的离散型和连续性,需选取合适的指标合理描述检测区间内检测点之间的密集程度,从而有效剔除干扰数据。 随机选取计算线路的100个设施设备扫描断面,同时计算每个断面中各个检测点之间距离的平均值a和标准差σa(见式(1)),得到100个断面的a+3σa,并计算其平均值b(见式(2))和标准差σb。采用l=b+3σb在统计意义上描述检测点之间的密集程度。 (1) (2) l=b+3σb (3) 本文采用如下方式对监测数据中的离散点和连续点进行判别,从而有效判断数据异常点。 2.2.2.1 离散点判断(区域计数法) 在U3中依次选取某待判断检测点,同时在U中选取Pi(xi,yi)及其左、右各20个数据点,左侧数据点坐标记为Zi-(xk-,yk-),右侧数据点坐标记为Zi+(xk+,yk+)。分别计算Pi与左、右各检测点的距离lk-、lk+: (4) (5) k从0增加到20,且lk+<3l或lk-<3l,表示待判断检测点位于以Pi(xi,yi)为圆心,以3l为半径的圆形区域内;当该圆形区域内的数据点Zi-(xk-,yk-)或Zi+(xk+,yk+)数量≤5时,则认为该检测点离散性较大,可判断为异常数据点。 2.2.2.2 连续点判断(连续计数法) 在U3中选取某待判断检测点,同时在U中选取Pi(xi,yi),分别计算Pi与Pi-1、Pi+1的距离lg-、lg+。 (6) (7) g从0增加到19时,设lg+<3l或lg-<3l的检测点数量为n,当n≤5时,认为该检测点与其他检测点不连续,可将其判断为异常数据点。 经上述操作,在U3中剔除异常点数据后得到U4,进而对U4中的侵限数据点进行侵限幅值计算。 2.2.3 侵限幅值计算 基于U4和车辆限界数据开展侵限幅值的计算,其计算过程如下: 1) 在U4中找到|x|最小的数据点(x0,y0); 2) 如果x0>0,则过滤车辆限界数据中横坐标小于x0的坐标点,仅保留横坐标大于x0的坐标点; 3) 在保留的车辆限界数据点中,找到y1 图5 车辆侵限幅值计算图解 4) 将y0代入该函数中求出x3,|x3-x0|即为侵限幅值; 5) 同理,若在式(2)中x0<0,则过滤车辆限界数据中横坐标大于x0的坐标点,仅保留横坐标小于x0的坐标点,采用式(3)、式(4)计算其侵限幅值。 依托OpenCV软件对侵限判别算法进行了实现。采用OpenCV软件中的pointPolygonTest函数计算检测点与车辆限界之间的位置关系,该函数利用矢量积运算的几何意义可以较好地判断检测点与多边形的位置关系。该算法在北京地铁车辆跨线运行和新设备加装等场景中进行了实际应用,并取得了良好的应用效果。 基于本文提出的侵限判别算法,采用北京地铁14条线路的限界检测点云数据,以北京地铁常用的6种车辆限界对其进行侵限判别与侵限幅值计算,并建立线路-车辆互联互通信息表。在此基础上,开发了北京地铁限界大数据综合管理平台(以下简称“北京地铁大数据平台”),实现了对侵限数据的可视化展示。该平台可直观呈现不同类型车辆在每条线路中的侵限位置里程、侵限具体部位及侵限幅值。 北京某条地铁线路中的车辆限界超限位置如图6所示。车辆超限位置和超限幅值,如图7所示。针对侵限问题,结合北京地铁大数据平台提供的侵限里程及坐标等信息,对侵限站台进行现场勘查,判定侵限物体为站台防踏空踏板胶条和站台边缘下方的铁板及固定螺栓,如图8所示。通过对侵限物体进行测量,发现其高度与北京地铁大数据平台提供的侵限数据相吻合,从而验证了本文算法的准确性。 图7 车辆超限位置和超限幅值截图 图8 侵限物体现场校验 该侵限判别算法的提出与北京地铁大数据平台的开发为后期隧道断面及车辆限界调整,以及车辆互联互通提供可靠依据,有利于实现各线路车辆的跨线运营、互联互通、兼容共享,满足网络化运营需要。 根据实际运营需要,北京地铁2号线复兴门站—长椿街站单侧隧道区间内加装5G(第5代移动通信技术)信号设备,且在可行性研究阶段需要对加装设备进行侵限判别。为快速、直观地呈现其侵限情况,将需安装设备的横断面绘制于隧道点云轮廓图形中,采用车辆限界对其进行侵限判别,得出安装通信设备后未出现超限情况,具体图形展示如图9所示。为验证本文侵限判别算法的有效性,制作了与安装设备等尺寸的泡沫模型(见图10),并将其安装于现场预设位置,经实际行车后发现加装设备后车辆可正常通过且距离车体存在明显的裕度,这在一定程度上验证了本文所述侵限判别算法的准确性。 图9 加装设备后车辆未超限展示截图 图10 加装通信设备模型 本文采用矢量积运算的几何意义判断检测点与多边形的位置关系的判别思路,提出了一套基于激光点云数据的城轨限界侵限判别算法。该算法共包含侵限点判断、异常点识别处理和侵限幅值计算等3个过程,可有效实现侵限判别计算。依托OpenCV软件对该算法进行了实现,且在北京14条地铁线路上进行了应用并取得了良好的效果。该算法有效实现了不同型号车辆在不同线路中侵限的精准、高效及自动化判别,可为城轨车辆跨线运行和不同线路互联互通工作的开展提供良好基础。
2.2 车辆限界匹配算法



3 侵限判别算法应用案例分析
3.1 车辆跨线运行场景


3.2 加装新设备


4 结语
