基于TypeB 卡阅读器的数字解调算法
2023-11-05陈俊凝
陈俊凝
(西北大学 信息科学与技术学院,西安 710127)
非接触式IC 卡系统由邻近卡(PICC)和近耦合设备(PCD)组成[1],两者通过无线通信来完成信息传输。然而,PCD 解调误差大、速度慢,将出现系统无法正确通信的问题。解调能力提升,不仅可以发挥PICC 芯片性能优势,还能够提升自身的可靠性和安全性,这对系统的运行起到关键性作用[2]。
对于符合ISO/IEC 14443[3]TypeB 标准的PICC,其发送给PCD 的数字信息也是被附加在847 kHz 的副载波上的,再利用负载调制将双重载波发送给PCD,波特率为106 kbps。简而言之,就是通过106 kbps 的数字信号对847 kHz 的副载波信号进行二进制相移键控(BPSK)调制,根据协议规定,采用连续8 个周期初始相位固定的副载波信号来表示“0”,“1”则用与初始相位相差为连续8 个周期的副载波信号表示[4]。
1 BPSK 相干解调关键技术
BPSK 调制利用载波信号的相位信息调制,包络检波无法检测到相位变化,因此采用相干解调方式更为理想[5]。特别是在PICC 和PCD 进行信息交互时,由于信号较弱,再加上外界干扰,信号在传送过程中很容易产生偏差,导致本地振荡产生的相干载波不能严格实现同频同相,并且大大影响了解调性能,因此在接收端实现载波同步非常重要[6]。
本文对传统解调算法进行了深入研究,结合实际工程的需要,针对BPSK 相干解调过程中的载波同步、码元同步等关键技术进行研究与实现,并且提出了优化方案加以对比分析。
2 载波同步
2.1 传统Costas 环路原理
锁相环在调制解调中发挥着重要作用[7],其是一种典型的反馈控制电路,能够锁定相位[8]。
然而传统锁相环技术对本地时钟频率要求较高,在跟踪载波时无法有效纠正较大频偏,也不适合宽率范围内的基带码元同步。
Costas 环[9]基于锁相环原理,其原理框图如图1所示。
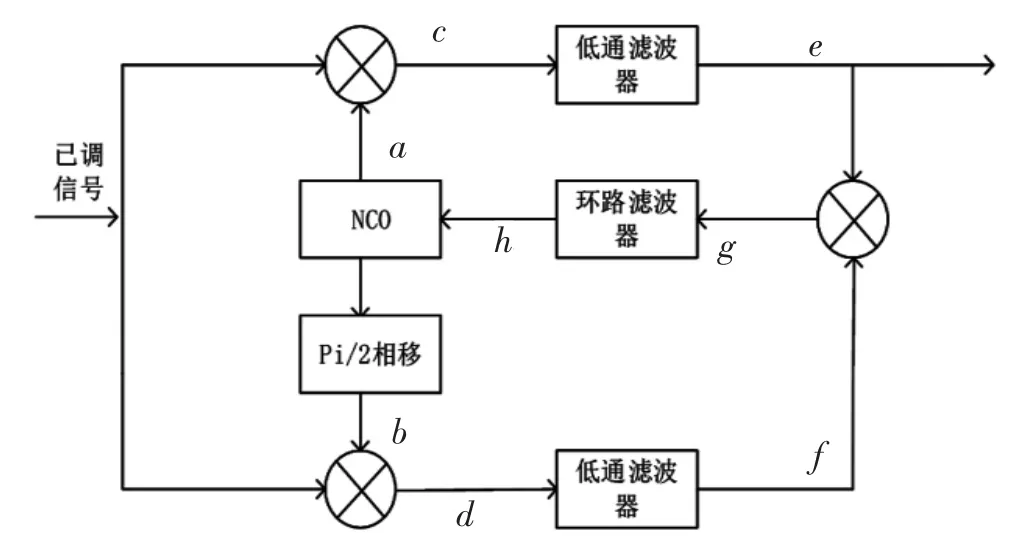
图1 Costas 同步环路原理框图
BPSK 信号被送入两路相乘器,与压控振荡器产生的a、b 两点电压相乘,得到c、d 两点电压,分别经过低通滤波器后相乘得到环路滤波器的输入电压vg为
式中:m(t)为调制信号,φ-θ 为本地信号与载波信号的相位差。对于BPSK 信号而言,m(t)=±1,并且在φ-θ 很小时,sin(φ-θ)=φ-θ,那么式(1)便可改写为
这时vg通过环路滤波器间接控制数控振荡器的频率,环路滤波器的作用就是低通,仅允许vg中的直流分量通过,数控振荡器(NCO)受到电压控制后调整频率不断使φ-θ 尽可能变小,直到它减小为0 时,就可以得到vg=1/2m(t)。
此时的电压和需要解调出的信号m(t)只是幅值不同,直接输出这个电压就可以得到近似的解调结果。
2.2 基于希尔伯特鉴相的解调算法原理
传统的Costas[10]环解调效果较为理想,不过其仍然存在某些缺点,载波频率高的时候,对滤波器特性要求也就变高,因此在实际应用中,常搭配叉积鉴频算法[11]来提高效率,实现起来会有些繁琐。本文在Costas 环法上做了部分改进,改进的结构如图2 所示。
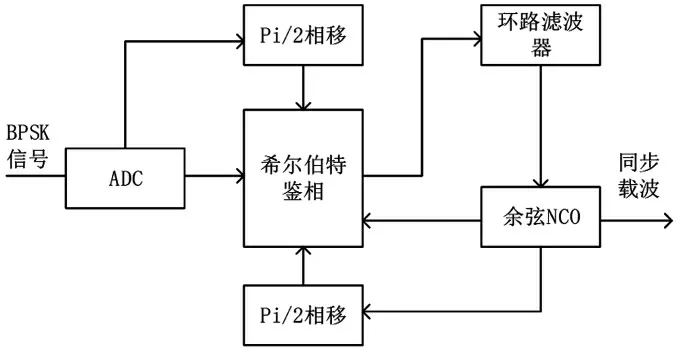
图2 基于希尔伯特鉴相的解调原理框图
希尔伯特鉴相模块总共有四路输入信号,与模数转换器(ADC)采样后的已调波和控制余弦NCO 产生的的信号有关,其中已调信号与其90°相移的信号固定不变,NCO 经过环路不断调整生成的余弦波和90°相移后的正弦波持续进入鉴相模块,这些信号在模块内部按照算法进行数学运算,得到相位差。计算过程如下。
设m为接收端收到的BPSK 调制信号,mh是调制信号移相90°后的信号,α 是余弦NCO 信号,β 是α 经过90°相移的信号,ωc是载波中心频率,△ω 为频偏,θ是载波的相位差,即
因此可以得到
运算结果便是本地载波与调制信号的相位差。
3 位同步
Gardner 算法[12]利用反馈环路,使得这种算法收敛速率高,运算量更小,所以本文选用了Gardner 定时同步环路实现码元同步,其原理框图如图3 所示。

图3 Gardner 算法原理框图
传统Gardner 定时环路通常在每个码元内的采样点数较少,不能根据初始赋值来直接锁定最佳抽样时刻,必须通过内插滤波器和NCO 模块不断地反馈计算出最佳采样点。对于本文所设置的参数,采样频率明显超过了码元速率,可以在每个码元内取得31 个采样点,在这些采样点中,有位于最佳采样时刻附近的值。
4 硬件实现
4.1 载波同步的硬件实现
载波同步模块采用Costas 同步环路由环路滤波器、NCO 以及希尔伯特鉴相器等构成。
对于环路滤波器,为了节省系统的硬件逻辑资源,简化计算,在不影响系统正常运行、确保误差在允许范围内,对环路系数的小数部分进行数据处理,将其转换为近似相等与2 的负整数次幂的值,这样就可以直接采用右移法对环路进行运算。
NCO 模块主要功能是产生同相的相干载波,然后通过低通滤波器得到数字基带信号,可以利用直接数字式频率合成器(DDS)原理实现NCO 功能。在设计时,为了减少ROM 占用的硬件资源,只在ROM 中存储1/4 周期的余弦波对应的值,其他周期的的值通过算法来计算。
希尔伯特鉴相器由4 个乘法器、2 个加法器以及1个实现反三角函数运算的CORDIC 算法模块[13]组成,其结构如图4 所示。乘法器和加法器采用QuartusⅡ中的IP 核即可生成,CORDIC 算法模块采用16 级流水线设计,将x0、y0和θ=0 导入到寄存器中,利用流水线对n 个固定的右移结构实现n 次迭代,这种结构尽管没有将逻辑资源的利用率降低,但是采用了较为简单的右移结构,简化了逻辑结构,有效提升了系统的时钟性能。此外,采用流水线结构也可以提高算法的运行速率,相比直接循环式结构的实现方法,速率提高了n倍,是高速系统中的关键点。反三角函数对应的值存放在ROM 中,可以减少资源占用空间。
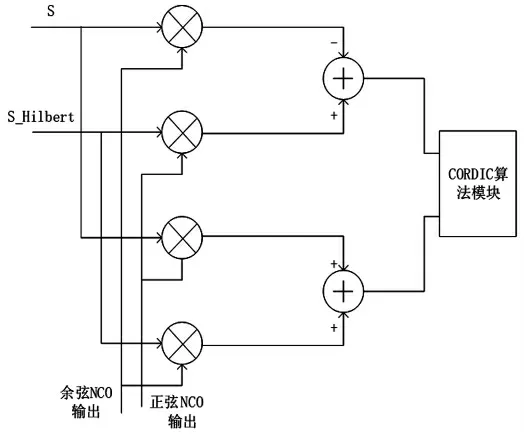
图4 希尔伯特鉴相算法模块
4.2 位同步的硬件实现
本文采用Gardner 定时同步环路实现位同步,由内插滤波器、定时误差检测、环路滤波器以及NCO 模块构成。其中环路滤波器与NCO 模块与内插滤波器模块使用Farrow 结构,实现了基于拉格朗日多项式的立方插值滤波器功能[14],该结构的滤波器由FIR 滤波器实现,滤波器参数由仿真工具FDATOOL 得到。
4.3 硬件测试结果
硬件实现和模拟BPSK 通信搭建的现场可编程门阵列(FPGA)硬件仿真环境如图5 所示。

图5 BPSK 通信实物图
为了得到与测试结果相比较的绝对基准来评估解调效果,需要得到协议的误码率或丢包率的理论极限,推导出理论极限为
式(8)分别描述了1 bit 信号能量值Eb与有效电压值VSrms和比特持续时间Tb、功率谱密度N0与噪声有效电压VNrms和噪声带宽BW 之间的关系;式(9)为BPSK 解调误码率计算公式;式(10)描述了数据丢包率和误码率的转换关系。
将解调得到的数据导入Matlab 中进行处理,得到数据在传输过程中的丢包率,将理论、实际以及原解调算法所得数据整合,得到丢包率(PER)对比结果,如图6 所示。
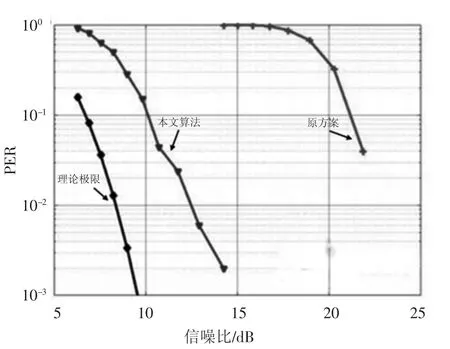
图6 理论、实际及原算法丢包率对比
图6 中由左至右曲线分别为理论极限、本文算法、原芯片解调方案在不同信噪比情况下的丢包率,每一个数据点发送500 个数据包。可以看到,在0.1 PER 值处,TypeB 的理论极限与实际测量结果存在3.1 dB 的差异,这是因为理论极限不包括数据包在开始或结束检测时的错误概率,只包含了误码率。可以看到在PER值为0.1 的情况下,相比原解调算法,本文设计算法所需信噪比环境降低了11 dB 左右,这说明本文设计算法可行,并且性能优于原解调算法。
5 结论
本文提出基于希尔伯特变换的BPSK 解调算法并完成了算法的硬件实现,通过对该算法、某款PCD 芯片解调算法的仿真,比较其在不同噪声环境下的丢包率得到该算法的解调优势:相比原算法,信噪比环境均降低了11 dB 左右,在低信噪比环境下,也能正确获取数据,解调效果显著提升。
因此,基于希尔伯特变换的BPSK 解调方案,合理可行且容易实现。有望在RFID 技术中得到广泛应用。