考虑再生制动的线控电制动系统防滑控制策略研究
2023-11-05张利芬
张利芬
(芜湖职业技术学院 汽车与航空学院,安徽 芜湖 241006)
汽车行业技术变革日新月异,呈现出“电动化、智能化、网联化、共享化”的新发展格局。目前市场上的纯电汽车,采用传统的电子液压制动系统,技术成熟,应用广泛,但液压传动存在响应慢、重力大、易泄露等明显缺陷[1],并不能满足智能化和网联化的发展要求。
在新能源汽车中,线控电制动防滑控制系统可以实现更加精确的制动控制,并且可以利用电能实现制动能量的回收和再利用,从而提高车辆的续航能力。此外,该系统还可以与车辆稳定性控制系统、自动驾驶技术等相结合,提高车辆的操控性能和安全性。
在此背景下,本文提出线控电制动系统,取消传统液压传动结构,车轮制动器的制动力由独立电机提供,该独立电机提供摩擦制动力,可与驻车电机分时共用,下文统一称摩擦制动电机。摩擦制动与驱动电机产生的再生制动构成行车制动的全部制动力。另外,引入线控技术控制制动电机工作,一方面借助先进的电机控制技术[2],可以实现对制动力的高精度、高稳定性和高灵敏性控制,提高汽车制动防滑控制效率,从而提高车身稳定性控制;另一方面,通过线控技术对再生制动和摩擦制动比例协调控制更加灵活,有利于提高制动能量回收率[3]。
1 制动力分配控制
线控电制动防滑控制系统的工作原理是利用电信号控制制动器,以实现车辆的制动。当驾驶员踩下制动踏板时,制动指令会通过电线传输到制动器,制动器会立即进行制动。这种制动方式可以有效避免车辆制动过程中的滑动和打滑现象,从而提高制动效率和安全性。
在制动过程中,由于汽车四轮轮重不一定均等,所以每个车轮最大附着力也不相等,一般情况汽车左右重力比较对称,本文主要研究前后制动力分配比例。对于整车而言,每一种前后制动力分配比值,都对应一种同步附着系数,汽车在该附着系数的路面上紧急制动时,能实现前后轮同时抱死的理想状态,在这种状态下,前后轮的附着条件的利用率最高。这样就可以使每个车轮在抱死前都能发挥出最大制动潜力,从而提高整车附着利用率,缩短制动距离,提高行车安全。
根据ECE 制动法规规定:当制动强度z 为0.2~0.8时,要求[4-5]
式中:φf,φr分别为前、后轴利用附着系数,z 为制动强度。由式(1)可知,车轮利用附着系数与制动强度成正比,且后轮利用附着系数应小于前轮,即优先防止后轮抱死。
本文主要研究内容为制动控制策略,在研究汽车线控电制动时不计空气阻力、车轮滚动阻力及横向惯性力对车轮垂向载荷的影响。简化后的车身模型如图1 所示,其中L 为轴距,G 为质心位置,La、Lb、hg分别为质心离前轴距离、质心离后轴距离和质心离地高度。
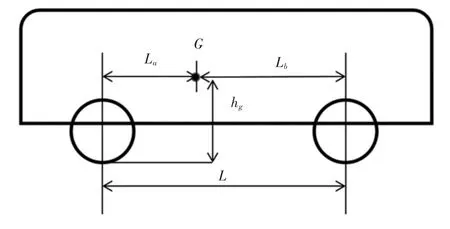
图1 车身简化模型
假设前、后轮轴重分别为Ff和Fr,前、后轮的地面制动力分别为Fbf和Fbr,根据利用附着系数定义及汽车受力平衡可得
式中:β 为前、后轮的制动力分配比例,将式(2)代入式(1)可得
为得出前、后制动力分配比例的特性曲线,设定汽车质量及相关几何参数见表1。
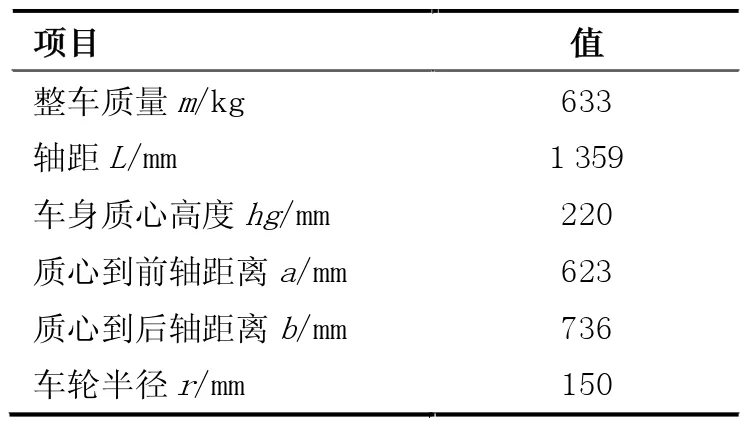
表1 汽车参数设定
将表1 中的设定参数值代入式(3)中,得出在满足ECE 制动法规条件下,前、后制动力分配系数β 控制的3 条边界曲线,如图2 所示。
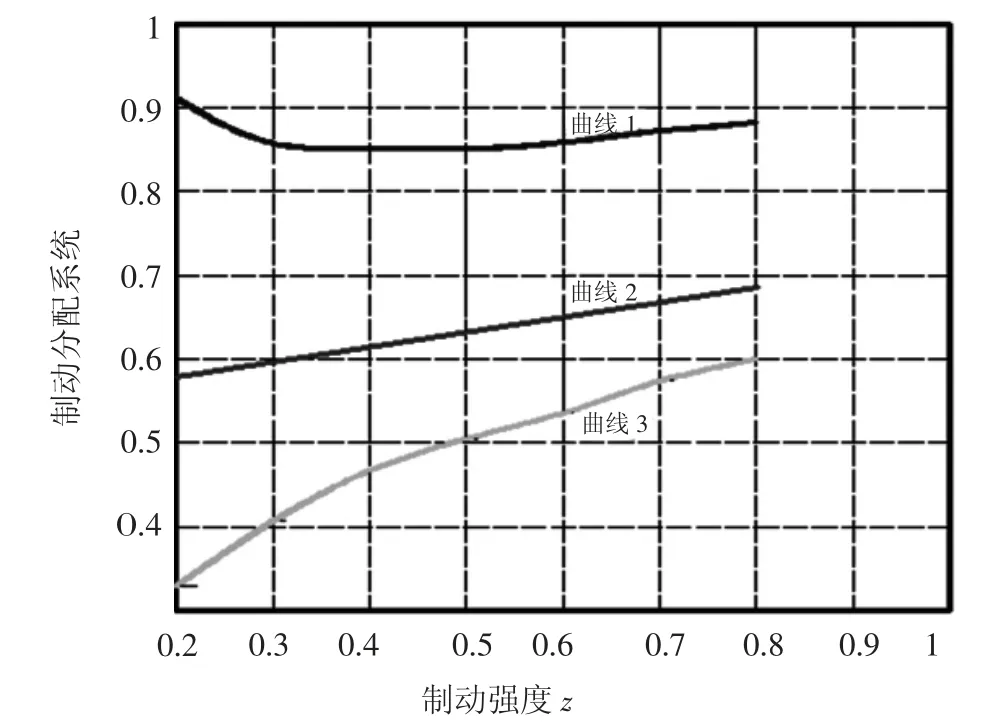
图2 制动力分配曲线
如图2 所示,曲线2 为能实现前后轮同时抱死的理想分配值曲线,曲线1 和曲线3 分别为前、后轴制动分配系数值的上、下极限值。另外,在介于曲线1 和曲线2 之间时,可保证始终是前轮先于后轮抱死,汽车失去转向控制,但依然处于稳定行驶工况。
因此,在进行前、后制动力分配比例控制时,为保证制动安全,制动力分配比例值应始终位于曲线1 和曲线2 之间。同时,为保证足够的制动效能,制动力分配比例值应尽量靠近曲线2。
2 前后制动力分配控制方案的确定
紧急制动时,最理想制动状态是前后轮同时达到抱死边缘。能实现这一状态的路面附着系数称为同步附着系数。对于一种分配比例只有一种对应的同步附着系数,也就意味着某一固定比例的制动系统只有在一种路面上能实现理想制动状态。这一固定的比例用β0表示,对应的同步附着系数用φ0表示,则
式(4)中L、Lb和hg的含义与上文相同。
前、后轮同时达到抱死边缘时,汽车能实现的制动强度为z,根据汽车理论知识,此时的制动强度z 与同步附着系数φ 相等,为达到理想的制动效果,控制器便将该附着系数设置成目标值,动态调节前、后制动力比例值β,则根据式(4)得出β 的控制方程应为:
当汽车制动强度需求为z时,用FB表示所需的总制动力,则
3 基于四轮制动力分配的动态防滑控制方案
根据汽车ABS 控制原理,汽车制动防滑控制的主要内容为滑移率控制。车轮与路面的纵横向附着系数会随滑移率的动态变化而变化。用uB和uS分别表示纵、横向附着系数。当纵向利用附着系数uB达到最大值时,对应的滑移率称为最佳滑移率,此时制动效能最高。此时制动距离的计算公式为
式中:u初为汽车初始速度。
而横向附着系数直接决定车辆的侧向抗干扰能力,兼顾制动效能和制动时车辆的操纵稳定性,防滑控制应能保证滑移率处于15%~20%。通过动态调节制动力大小使滑移率在最佳区间内波动,保证车轮不抱死的前提下发挥最大制动效能。
根据以上分析,以单侧前轮为例,拟定控制流程如图3 所示。
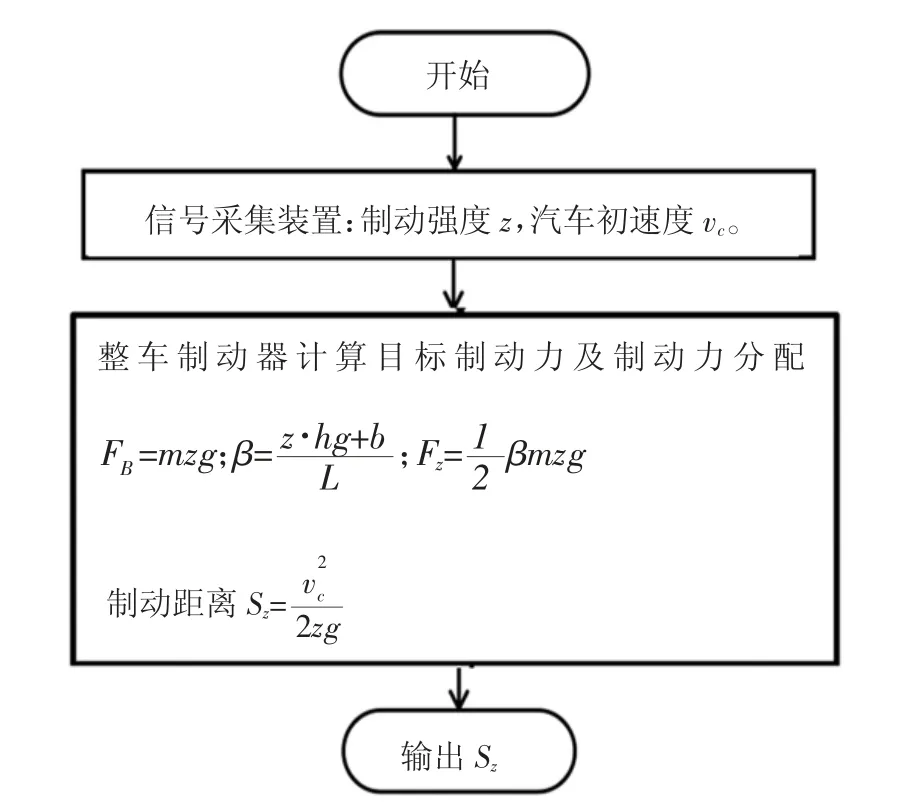
图3 防滑制动控制流程图
对于纯电驱动电动汽车,续航为评价电动车性能的核心指标之一。由于电机能量转化的可逆性,在制动过程中,提高制动能量的回收率不仅能提高整体续航,也能减少车轮制动器的产热量,提高制动器使用寿命,同时由于再生制动的可控性,可以提高制动力控制的灵活性,所以在制动防滑控制过程中为综合考虑制动性能和能量回收率,对于制动力FZ的控制不仅涉及到摩擦制动电机,同时也涉及到再生制动电机,即驱动电机。再生制动也可以通过调整滑移率来影响制动防滑控制。在制动时,如果滑移率控制得当,可以减少轮胎的磨损,提高制动效率,同时避免出现侧滑等失控情况。一般来说,电动汽车再生制动的滑移率控制是通过电控刹车器实现的。电动汽车采用纯电、混动或轮毂电机驱动等不同的动力模式,其制动电机控制方案也有不同,后期可根据具体实例做进一步研究。
4 再生制动能量回收控制
以满足防滑控制为前提,制定制动能量回收控制方案,再生电机在施加再生制动力时输出电功率用Pe表示,则
式中:P1为输入机械功率,Pmec-PFc-/斜体>nI2R为功率损耗。当输入功率不及电机损耗功率时,电机处于耗能状态。
再生制动能量回收,与再生制动比例ρ 的关系,制动能量回收率计算如图4 所示。
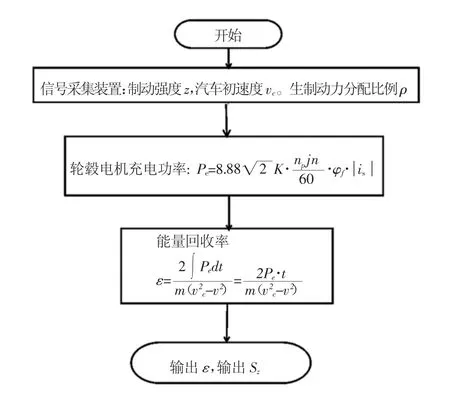
图4 能量回收计算方案
根据式(8)可知,影响制动能量回收率的主要因素有:
1)电机特性。本文所选用的永磁同步电机,无励磁损耗,电机工作时相比于交流异步电机而言,同等条件下,能量回收率较高。
2)储能装置。电池的荷电状态SOC(System on chip)、电池的充电性能等会影响电机再生能量的提取和储存。电池的充电特性参数需与电机的输出特性参数匹配。另外,一般情况下,只有当蓄电池SOC 处于特定范围时才具备比较良好的充电性能。
3)制动工况。车速与制动强度会直接影响制动能量回收的效果,不同车速的制动工况,能量消耗区别很大,比如在城市行驶环境中,由于制动频率高、制动强度适中,能量回收效果比较好;在车流量较小的国道低速行驶,因为车速较低,制动强度较小,可选择较大的再生制动比例,具备最佳的制动能量回收效果;在高速公路行驶环境中,制动频率低、制动强度大,此时由于再生制动具有延迟性,为满足制动安全的首要条件,再生制动比例较小,从而导致能量回收效果较差。
此外,路况、天气、温度等自然环境条件对汽车制动回能的回收也都有影响,不过相对较小。
当然,影响能量回收效率的最关键因素还是制动力控制和能量管理控制的问题,能否同时实现“利用附着系数最大化”和“能量回收率最大化”的双重目标关键在于制定合理的再生制动比例控制方案。
5 结束语
能否同时取得高制动效能和制动安全的关键是制定合理的防滑控制方案,为把握此关键,本文在制动打滑的理论分析基础上,得出车辆制动防滑控制目标,进而拟定制动力分配比例控制和车轮防滑控制方案,并在此基础上优化再生制动比例,以满足制动防滑控制要求为前提,制定再生制动能量回收控制方案。为后续仿真模型的建立做理论基础。