基于慧鱼组合式智能莲藕采洗分拣一体装置的研究
2023-11-03周美丹
周美丹
(江西机电职业技术学院,江西 南昌 330013)
0 引言
莲藕细嫩光滑、鲜嫩脆爽、口感好且具有药食同源价值,但由于莲藕的生长环境特殊,采摘和收获过程较为困难,莲藕好吃,挖藕却难。挖藕一直是藕农们的一大难题,也是莲藕产业发展路上的“拦路虎”。挖藕机是一种新型的农业机械,它的出现为农业生产带来了新的机遇和挑战[1-3]。通过市场调查和资料分析,笔者发现市场上的挖藕机绝大多数还需人工入水参与采挖或收集,采收过程中莲藕损坏率高,而挖藕机功能单一,且价格较高,普通藕农难以承受[4-5]。另外,挖藕机的使用需要一定的技术水平,一些农民缺乏相关的技术知识。因此,挖藕机行业需要加强技术研发,降低产品成本,开发出功能齐全且便于藕农使用的挖藕机[6-9]。
为此,本文设计了一款慧鱼组合式智能莲藕采洗分拣一体装置——“与‘藕’相伴”[10]。本设计以ROBO Pro智能控制系统为核心,将各模块(冲压装置、拦截装置、打捞装置、传送装置、分拣装置、阻断装置、换箱装置、智能仓储装置、智能抓取装置、驱动装置)集于一体。通过高压喷头,冲散淤泥中的藕,使其漂浮于水面,继而对水面上的藕进行拦截、打捞,在传送过程中对藕进行多次清洗、智能分拣,最后完成收集、仓储,实现采藕作业全过程智能化、自动化、无人化。
1 创作思路与作品构思
1.1 创作思路
通过比对分析市场上挖藕机的功能特点和藕农的需求,发现莲藕采收面临的痛点问题为劳动强度大、效率低,采收上来的莲藕品质差,挖藕机功能单一、操作不便利等。为解决市场痛点,研究团队通过研究莲藕采挖关键技术,设计研发了一款漂浮船式挖藕机,作品整体图如图1所示。

图1 作品整体图
作品“与‘藕’相伴”集冲压、采收、传送、清洗、收集、仓储于一体,智能控制机器自动完成所有工作,无需人工下水,挖藕效率高、挖藕质量好、操作便利、使用稳定,将成为藕农们的“好帮手”。
1.2 作品构思
研究团队通过深入莲藕种植基地调研、实地挖藕探究、资料查阅,获取设计灵感,作品具有操作自动化、功能模块化、智能化等特点。
1.2.1 冲压系统
该系统通过高压喷头,冲散淤泥中的藕,使其漂浮于水面。
1.2.2 拦截系统
拦截系统主要包括传动和拦截两部分。电机启动,通过链条带动螺杆旋转,继而将挡板推出。随后通过齿轮与连杆相结合的方式驱动挡板展开,从而拦截塘内漂浮在水面上的莲藕。
1.2.3 传送系统
传送系统由打捞装置和传送装置组成。打捞装置中的滚筒将莲藕打捞至传输带,莲藕由传输带传送至传送装置。在传送过程中,喷头对莲藕进行首次冲洗,履带将莲藕传送至下一系统。
1.2.4 清洗系统
莲藕被打捞至履带,在运输过程中多头喷管对其进行第一次粗洗。莲藕送入传送装置后,多头喷管和旋转毛刷对其进行精洗,洗净后的莲藕通过履带传送至下一系统。
1.2.5 仓储系统
履带将洗净后的莲藕运送至储存箱中,储存箱装满后智能夹取装置自动将其抓取至仓储间进行堆叠存放。装置后方设有大型储存间,以便挖藕机在水上进行长时间的工作,减少靠岸卸货次数,提高挖藕机的工作效率。存储间配备升降舱门,使装置形成半封闭空间,提高仓储存储的稳定性,还可便于打开舱门进行卸货。
1.2.6 智能识别系统
通过摄像头智能识别传输当中的坏藕或陈藕,便于机械臂挑选分离;利用In-Sight软件智能视觉系统对莲藕储存箱箱体容量进行智能化识别,便于及时换箱。
2 作品创新
“与‘藕’相伴”——智能采洗分拣一体机相对市场上其他类型挖藕机,具有以下创新点。
1)功能丰富,高效工作。除了能够挖藕,还具有清洗、筛选、仓储等其他功能,满足藕民的多元化需求。
2)不需抽水,漂浮工作。对比传统履带式采藕设备,“与‘藕’相伴”——智能采洗分拣一体机不需要将池塘水位降低,节省了抽水时间以及电量的消耗,符合国家对绿色农业的要求。
3)智能识别,分拣换箱。通过摄像头智能识别传输中的坏藕或陈藕,自动完成莲藕筛选工作;智能识别储存箱是否存满,便于及时自动换箱,提高工作效率。
4)智能仓储,节约能耗。挖藕机后方配备一个大型仓储间,内设有升降门,使其形成半封闭空间,提高了仓储储存箱堆叠的稳定性,智能机械平台对储存箱进行自动堆叠,可存放大量货物,减少挖藕机往返卸货次数。
3 结构与工作原理
3.1 智能控制部分
本装置的控制系统由ROBO Pro控制软件、TXT接口板和传感器组成。程序图如图2所示,通过编写控制程序,接通TXT开关自动启动程序,实现精确控制。本装置的3个TXT控制器可对各电机、传感器的运行状态进行监控,进一步保证了莲藕采收船运行的可靠性。

图2 程序图
3.2 冲压装置
冲压装置如图3所示,挖藕机开始工作时,水泵从藕塘中抽水,通过加压装置对水进行加压,利用从喷水枪口喷出的高压水柱对藕塘的淤泥进行冲压,冲散淤泥中的莲藕,从而使淤泥中的莲藕浮出水面。
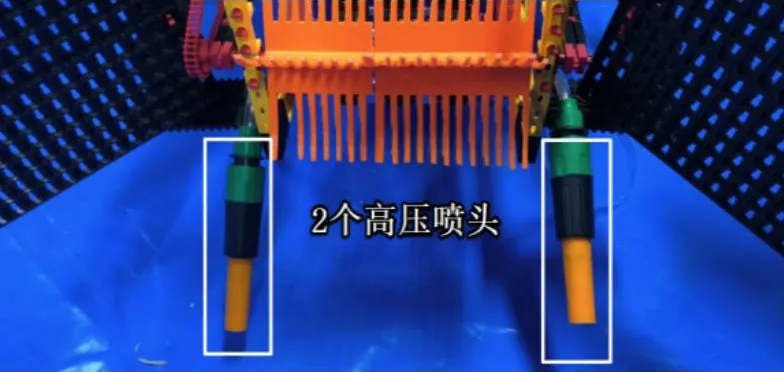
图3 冲压装置
3.3 拦截装置
拦截装置如图4所示,采收开始时,通过螺旋传动推出挡板,随后通过齿轮齿条传动驱动挡板展开,从而拦截塘内漂浮在水面上的莲藕,采收结束后,挡板收回。

图4 拦截装置
3.4 打捞装置
打捞装置如图5所示,当滚筒到达指定收集位置后,启动电机带动滚筒开始运作,拦截区域内的莲藕,莲藕会随着滚筒的旋转被运输至履带。继而,装置中的喷水管开始喷水柱,对莲藕进行初步冲洗,完成莲藕的打捞和第一次清洗工作。

图5 打捞装置
3.5 传送装置
传送装置如图6所示,在打捞装置中经过初洗后的莲藕随着履带传送至传送装置(长履带部分),喷头将水以水雾的形式喷至莲藕和软毛刷上,软毛刷旋转,对莲藕进行精洗工作,随后将莲藕传送至分拣装置。传送装置采用链传动,使装置平均传动比更准确,工作更加可靠,效率更高。

图6 传送装置
3.6 分拣装置
分拣装置如图7所示,分拣装置通过摄像头对运输过程中的莲藕进行图形识别,如若识别到坏藕或陈藕,夹爪将会启动。在摄像头的定位下,夹爪全方位运动,自动抓取坏藕或陈藕,并将其运送至滑道,坏藕从滑道中滑出。

图7 分拣装置
3.7 阻断装置
阻断装置如图8所示,阻断装置中的气动电机连接气泵,带动阀门进行上下运动,实现阻断门开启和关闭。当摄像头识别到储存箱存储满之后,阻断装置中的电机启动,两个气缸将挡板往下推,阻断传送带中正在传送的莲藕,同时,传送装置的传送速度自动降低,防止传送带上的莲藕堵塞。当换箱装置完成换箱后,摄像头再次进行识别,阻断装置挡板上升,同时传送带恢复原有传送速度。
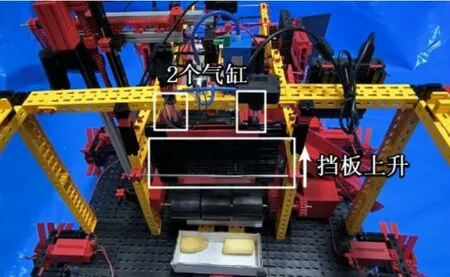
图8 阻断装置
3.8 换箱装置
换箱装置如图9所示,当阻断挡板降下,储存框被机械夹爪夹走,微码电机启动,通过螺杆旋转带动夹爪向前运动,推出新的储存箱,从而实现储存箱更换。

图9 换箱装置
3.9 智能仓储装置
智能仓储装置由仓储装置和智能抓取装置两部分构成,如图10所示。

图10 智能仓储装置
3.9.1仓储装置
装置后方配备一个大型仓储间,可存放大量货物,同时还配有升降门,便于储存框存放和卸货。升降门通过链传动和齿轮传动驱使升降。爬升时:传递动力大,寿命长,工作平稳,可靠性高;下降时:重力下沉,匀速下降,效率高。
3.9.2 智能抓取装置
当储存框被推出时,智能抓取装置通过导轨移动到箱体上方对其进行抓取。装置设有自动升降机构,可在仓库内全方位移动进行货物堆叠。前后:微码电机带动齿轮啮合驱动负重轮,使其在导轨上进行前后运动,负重轮上有橡胶包裹,用于增加摩擦力。左右:链条连接夹爪,在两端设有微码电机,工作时微码电机带动齿轮传动,实现左右精确运动。抓取:两根螺杆并排衡置,通过齿轮传动控制两螺杆移动,达到使夹爪开合的目的。爬升:通过齿轮与齿条啮合进行爬升,传递动力大,寿命长,工作平稳,可靠性高。
3.10 行驶装置
行驶装置如图11所示,行驶装置由编码电机带动链传动,驱动6个桨叶轮快速旋转,实现挖藕机在水面上行驶。左右两侧对称分布3个桨叶轮,可以更好地控制方向,实现船体的全方位平稳运行。

图11 行驶装置
4 推广应用价值
“与‘藕’相伴”作为新型的挖藕机,具有如下应用价值:
1)自动化程度高,减少人工投入。从采藕、清洗、筛选、收集、仓储到搬运,全程通过程序智能控制,自动完成所有工序。仅需操作员,无需其他人工投入,大大降低了人工成本,成功将“体力活”变成“技术活”,实现科技助农。
2)功能丰富,工作效率高。不仅能够挖藕,还具有清洗、筛选、仓储、搬运等其他功能,且各模块连续作业,工作效率高,满足藕农的多元化需求。
3)莲藕采收品质高。利用水枪冲泥来采收,不会对莲藕造成损伤,保证了莲藕的完整、品相和品质。
4)操作简单。只需要在手机或电脑端点击开关控制按钮,即可完成一系列工作,对使用者无技术要求,解决了藕农招工难的问题。
5)减少对土地的破坏。采用喷头冲压采藕,减少了对环境的破坏,保护了生态环境。
