优视摄影测量在大比例尺地形图修补测中的实践
2023-11-02李勇陈枫邱亚军
李勇,陈枫,邱亚军
(1.浙江华东测绘与工程安全技术有限公司,浙江 杭州 310000; 2.深圳市规划和自然资源调查测绘中心,广东 深圳 581000)
0 引 言
大比例尺地形图具有精度高、地形要素表示多且全面等的特点,因此常常作为基础数据用于规划、管理、设计和建设[1-2]。如今城市建设得到快速发展,为保持城市地形图的现势性,满足城乡发展建设的需要,地形图修补测工作显得尤为重要[3]。传统测绘作业的缺点制约着测绘行业的发展,它的缺点有作业人员劳动强度大、作业效率低、作业时间长、成本高以及测绘产品单一等。因此,包括无人机倾斜摄影在内的测绘新技术应用越来越广泛,在大比例尺地形图修补测的工作中也得到了充分的应用。然而,针对复杂城市场景中高层建筑所在区域高度变化大、楼栋间距小、遮挡严重等问题,传统倾斜摄影提供的观测仍然有限,很难进一步提升三维重建模型的精度和完整性[4-5]。本文介绍的优视摄影测量利用了倾斜摄影数据,减少外业采集时间。
优视摄影测量可依赖待测区域概略模型的三维几何信息出发,计算出精确三维重建所需的拍照视点(如图1所示),进入建筑间进行数据采集,从来解决部分建筑物间由于倾斜摄影视线遮挡而产生的拍摄盲区。

图1 拍照视点及方向
1 基于优视摄影测量技术的地形图测绘工艺流程
无人机搭载单镜头时,根据设定的角度,飞行过程中,在不同的时间点分别拍摄垂直于地面的正片和与地面形成一定角度的前、后、左、右方向的斜片,从而达到模拟多镜头倾斜摄影的目的[6]。无人机倾斜摄影的主要作业流程有作业前准备及像控点布设、无人机飞行数据采集、空三测量及三维建模、利用三维模型进行大比例尺线划图绘制、调绘补测等。
优视摄影测量是指利用目标区域的概略模型,生成模型重建所需要的密集采样初始视点,再利用采样点可重建性约束的视点优化技术,实现最小数据采集代价下的精确三维模型重建的技术[4]。优视摄影测量是面向对象的摄影测量技术模式,并遵循由粗到细的摄影采集策略,其拓展是基于可重建性判断依据,对目标区域生成的航摄视角进行自动优化选取,从而形成最优视点的有效规划路径提供给无人机进行航飞数据采集[7]。
优视摄影测量主要作业流程与倾斜摄影不同之处在于数据采集阶段,即在无人机飞行数据采集前需做以下工作:预飞行采集制作概略模型;生成采样初始视点;视点优化及生成规划路径。其中概略模型可选用倾斜摄影照片快速建模获得,优视摄影测量应用于地形图测量的工艺流程如图2所示。
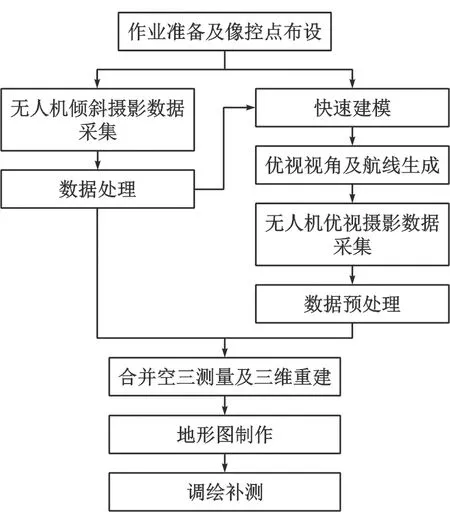
图2 优视摄影测量技术应用的工艺流程
2 应用案例
2.1 测区概况
本次优视摄影应用于深圳市1∶1 000地形图修补测工作,测区位于深圳市龙华区,面积约 2.2 km2。前期利用深圳市地形图修补测变化巡查软件进行变化地物调查,并上传至深圳市新型基础测绘工作平台,确定了测区范围内有多个新建小区及商务中心等,变化地物面积约占测区面积的30%。测区内最高建筑高约 170 m,相对高差约 110 m,建筑物间互相遮挡较多。
2.2 作业前准备
收集测区资料,明确坐标系统及高程基准,制定无人机航飞的技术方案(包括无人机、传感器的选择;地面分辨率、影像重叠度、飞行航高等的确定)及安全专项方案并申请了空域(踏勘时确定测区无禁飞区)。
2.3 概略模型的快速生成
无人机飞行作业前首先布设像控点,各像控点间距在 350 m左右,其坐标及高程测量根据GNSS图根控制测量的技术要求,采用网络RTK模式接入SZBDCORS的方式进行测量。外业无人机飞行阶段,首次飞行利用M300无人机搭载禅思P1相机进行智能摆拍测量数据采集,航向重叠度80%、旁向重叠度70%,采集的照片数量为 2 008张。使用戴尔图形工作站以及RealityCapture软件在作业现场对获取的数据进行快速重建,耗时约 50 min,导出网格模型(*.obj格式)和点云数据(*.xyz格式),用于优视摄影航线规划,生成的概略模型如图3所示。
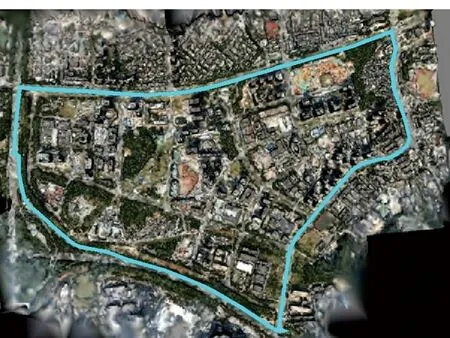
图3 测区概略模型
2.4 优视摄影与倾斜摄影结合航线规划
优视摄影航线规划在蝶舞航测规划系统中进行,首先根据建筑安全距离及安全高度,以此来设定飞行区域的安全罩,用以保证飞行安全。在此基础上设定采样点重叠率为80%,航摄视距为 160 m(2 cm采集分辨率),设定最低飞行高度为 30 m,蝶舞航测规划系统会自动计算出分辨率一致情况下所需采样初始视点,其中包括进入高层建筑间所需的采样初始视点,基于以上设定生成初始视角点 17 259个。然后导入倾斜摄影的pos信息进行优化,获得优化视点以及最优连接的飞行路线(如图4所示),经优化后视角点(即航摄点)数量 9 369个。最终根据视角分区聚类形成分区航线并进行无人机航飞数据采集,本次采用单机分段航摄的方式进行数据采集,大疆M300每架次飞行时间约 30 min,共飞行21架次(含倾斜摄影3架次),耗时3天。此外亦可根据规模及工期要求采用多机协同的方式进行航摄(图5中不同颜色的飞行路径可分配给不同无人机进行多机协同作业),可大幅压缩外业作业时间。
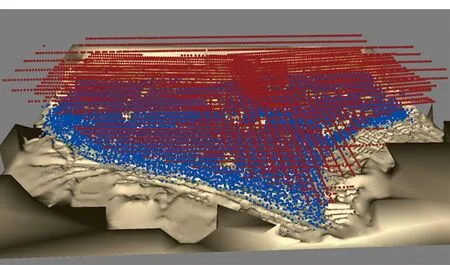
图4 初始视角点(红色:倾斜视角,蓝色:优视视角)
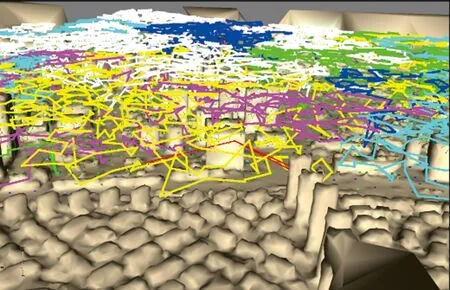
图5 优视摄影优化后的航测采集点及飞行路径
2.5 三维模型重建
重建时将倾斜摄影照片与优视摄影照片一同重建,两者共拍摄影像 13 277张,无人机航摄期间天气晴朗。经检查飞行POS数据完整;影像清晰,色调均匀,层次丰富,无遗漏缺失,满足后续工作要求。本次利用Smart3D软件经空中三角测量后进行三维模型重建工作,空三解算及相关像控点平差解算后精度很好,满足相关规范要求。
2.6 内业数据采集
选用idata_3D图库一体软件进行内业数据采集工作。三维模型实现与实景一致,且数据采集软件为祼眼3D采集,直接对地物特征轮廓、线状地物进行矢量测绘。从图6的(a)、(b)中可以看出,在高层建筑底部的建模效果较好,可以满足内业采集的需求,从而极大地减少外业补测的工作,仅需对小部分通过影像判读无法确认属性的内容进行调绘即可。

图6 模型整体、局部效果
3 精度分析
本次优视摄影生产的三维模型主要用于大比例尺地形图采集,质量检查时参考行业标准规范检查指标,并考虑实景三维模型数据质检的技术特点,此次重点对模型精度进行检查分析。精度检查包括平面位置、高程精度检查,通过定量比对实测的检查点数据与之对应位置实景三维模型数据的差值,从而统计计算得出实景模型主体建筑物、构筑物成果的几何精度[8-9]。此外依据模型采集的地形图根据文献[10]的要求:主要地物点相对于邻近控制点的点位中误差不得大于 ±10 cm,次要地物相对于邻近控制点的点位中误差不得大于 ±15 cm;平坦地区高程点相对于邻近控制点的高程中误差不得大于 ±15 cm,铺装地面高程点相对于邻近控制点的高程中误差不得大于 ±7 cm,对地形图精度进行检查。
本次实践所生产的地形图图面数据结构及整饬质量经现场核查需满足文献7的要求;实景三维模型以及地形图精度检查利用拓普康GPT-4002LN全站仪实地设站,采用极坐标法进行数据采集,其角度测量精度为2秒,有棱镜测距精度为2 mm+2 ppm*D。作业时检查点为随机选取、均匀分布的主要地物点150个,铺装地面高程点57个,全部点均参与模型精度统计(其中参与地形图精度统计主要地物点有67个,铺装地面高程点有33个)。根据文献7中的精度统计要求,中误差的计算公式为:
式中M△为中误差;n为检测点数量;△为检测较差。经统计和计算,三维模型与全站仪实测数据的平面较差最小值为 0.2 cm,最大值为 17.0 cm,高程较差的绝对值最小为 0.0 cm,绝对值最大为 15.0 cm,平面中误差为 ±0.053 m,高程中误差为 ±0.057 m,由此可见三维模型的精度较好,其具体统计表如表1所示;通过三维模型采集的地形图数据与全站仪实测数据的平面较差最小值为 0.1 cm,最大值为 15.7 cm,高程较差绝对值最小为 0.3 cm,绝对值最大为 15.6 cm,平面中误差为 ±0.057 m,高程中误差为 ±0.062 m,平面精度和高程精度均满足文献[7]的要求,其具体统计表如表2所示。
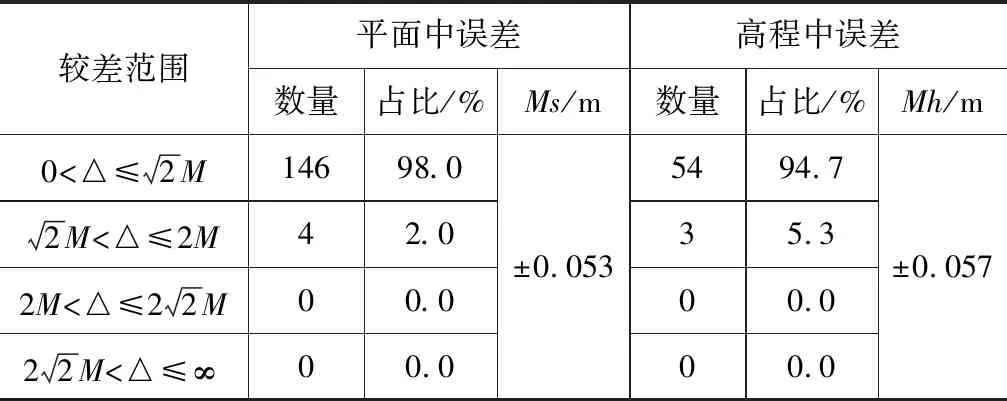
表1 三维模型误差统计表
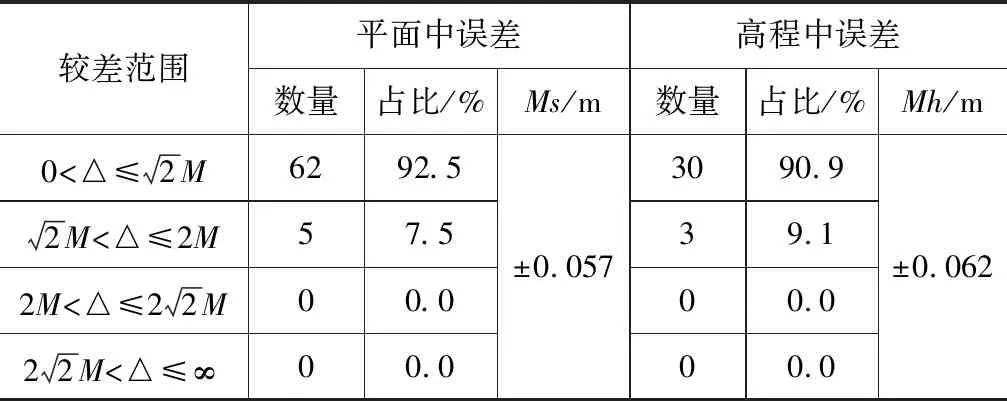
表2 地形图误差统计表
4 结 语
通过本次工程实践,优视摄影测量的优点在于:①优视摄影测量技术在解决复杂城市场景中地物高度变化大、遮挡严重等问题时,可根据优化的视角进入高层建筑物间对建筑侧面及底部的地物进行拍摄,从根本上解决由此产生的分辨率不一致、模型缺失或拉花严重的问题;②在概略模型的基础上设定的安全罩,可确保无人机的飞行安全;③极大地减少外业补测的工作;④其建模精度满足 1∶1 000大比例尺地形图测图精度需要。相比于优点,其作业效率方面相较于倾斜摄影技术稍有不足,因而将两者相结合用于大比例尺地形图测量发挥各自优势,将会是复杂场景的大比例尺地形图测量很好的解决方案,此外还可通过多机协同的作业方式提高工作效率。