地铁隧道中移动扫描技术小角度误差处理分析
2023-11-02李航天
李航天
(上海市建筑科学研究院有限公司,上海 201108)
0 引 言
随着城市的快速发展和不断扩容,轨道交通成为重要的市政基础设施和交通系统之一,是城市基础交通运输网的重要组成部分[1],以上海为例,随着上海地铁新线的不断投入运营,截至2021年年底,上海轨道交通运营全网络里程增加到 831 km,线路增加到20条,运营车站增加到508座,交通网规模继续领跑全球。地铁隧道作为对国计民生有重大影响的生命线工程,公共安全的重要性尤为突出,其技术状况和安全运营状态直接影响城市交通功能的正常实现和人们的生命财产安全[2]。地铁运营线路长、分布范围广,地铁运营保障公司压力越来越大。尤其运营时间较长的地铁线路,由于材料的自然老化、退化、长期超负荷交通流量[3],再加上各种各样突发性的极端自然灾害如地震、台风、特大暴雨的影响,轨道交通隧道的运营安全在时时刻刻受到挑战,地铁结构的安全性和稳定性监测需求日益提高,其中隧道断面的形变是安全保护的重要内容。现有对隧道外部的变形监测多是通过全站仪、水准仪对隧道断面进行观测完成的,虽然可获得高精度的结果,但效率低下,在巨大的工作量面前,失去了其优势,因此传统的检测测量方式已经远远不能满足其管理需求。为此,运营保障公司亟须引进当前先进的技术辅助其管理工作。
近年来,随着三维激光扫描仪的测量精度不断提高及其在变形监测领域内理论的发展,三维激光扫描技术通过非接触主动测量方式直接获取到高精度三维数据,能够对任意物体进行扫描,且没有白天和夜晚的限制,快速将现实世界的信息转换成可以处理的三维点云数据,合理利用有限的工作时间窗口,不仅可提供隧道影像,还可量化形变,保障地铁的安全稳定运营,三维激光移动扫描技术巨大的优势使其应用在隧道整体变形监测中成为可能。因此,把三维激光扫描技术引入地铁运营维护的检测测量工作中来逐渐成为管理部门的共识[4~8]。
但是,仅仅提高测量效率远远不够,在提升测量效率的基础上,如何优化数据处理算法,进一步减小误差,得到更加准确的隧道单环管径收敛值,才是更好地监测隧道结构变形与病害及满足保障轨道交通隧道的运营安全的有效手段。目前国内不少单位成功应用于轨道检测实际工程中,在以前的工程对比中,发现如何使数据稳定可靠、内符合性非常高、降低仪器安装等人为误差的研究比较少[9]。因此,本文依托实际工程为背景,针对三维激光移动扫描在扫描过程中出现的点云与实际存在的各种误差做了详细分析与纠正。采用数值分析的方法,建立三维隧道误差模型,从三维空间及每环点云区间角度分析,将点云误差归纳为三类:扫描仪断面照准误差、扫描仪封顶块中心照准误差与扫描仪行进向倾斜误差。
1 误差分析
隧道是由多环拼接而成,如图1所示,对通缝隧道而言,每环是由标准的多管片拼接组成。隧道每环的平铺图与测量坐标系之间有着严密的坐标转换关系,因此,隧道平铺图的几何特征可以转换到测量坐标系中。移动监测过程中,必须保持扫描断面与隧道断面平行,平行程度与收敛结果精度密切相关。而实际工作过程中,受扫描仪安装、轨道走向、轨道小车设计等因素影响,不可避免会出现偏差,导致扫描断面与隧道断面不平行。如图1所示,PA、AB、BC、CD及DQ为单圆通缝隧道环管片,下图为隧道扫描某一切片示意图,建立以隧道中轴线上一点O为原点,z轴指向隧道顶端,y轴为推扫方向,建立右手系,称o-xyz为中心坐标系。以轨道中线为横轴,隧道椭圆周方向将隧道面展开,建立隧道平面坐标系。现将管片放到oo′_xx′zz′平面中,PA、AB、BC、CD及DQ管片对应的圆心角分别为65°、65°、16°、65°和65°。为了展开隧道任一环平铺图,先将测量坐标系oo_xxyyzz原点平移至环中轴线上oo′点,形成oo′_xx′yy′zz′坐标系,过zz′oo′作射线与隧道底部交于点M,过M作隧道中轴线的平行线,使用一定大小BMP图像,根据每点坐标,计算像素位置,用点的灰度值或反射值填充,可依次获得隧道灰度图或反射率图。每个切片均可如此操作,再拼接所有切片,即可获得推扫里程区间灰度图或反射率图。展开环平铺图,按照从小到大的环号顺序拼接得到隧道整体平铺图,为了减少无用的点云区域,将平行线左右60°圆心角区域删除,得到最终的隧道整体平铺图。P、A、B、C、D和Q为管片接缝位置,隧道立体图和平铺图关系如图1所示。
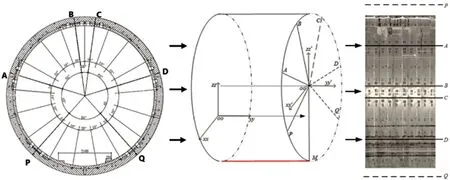
图1 隧道与平铺图转换关系图
隧道每环平铺图与测量坐标系之间有严密的坐标转换关系,隧道展开图中,包含了扫描断面与隧道断面之间关系。如图2所示,若环缝在平铺图中呈现竖直形状,则表明隧道断面和扫描断面平行;如图3、图4所示,若环缝再平铺图中呈现倾斜形状,则说明隧道断面和扫描断面不平行,存在角度倾斜。因此,可从平铺图上识别并绘制所有环缝求解出每条环缝所在位置的倾斜角度改正数,以此纠正扫描仪倾斜小角度误差。
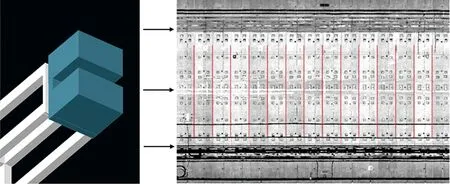
图2 环缝竖直状态下隧道平面坐标展开图
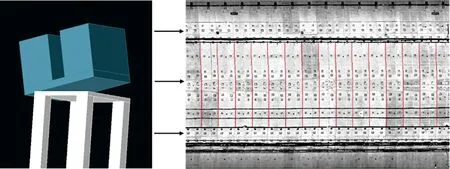
图3 绕xx轴旋转环缝倾斜状态下隧道平面坐标展开图

图4 绕zz轴旋转环缝环缝倾斜状态下隧道平面坐标展开图
2 技术原理
隧道每环平铺图与测量坐标系之间有严密的坐标转换关系,因而,平铺图的几何特征可转换到测量坐标系中。对通缝隧道而言,建立图5所示的坐标系,O-XYZ为标准椭圆坐标系,OZ轴指向管片BC中心,OY轴与隧道中轴线一致。由于轨道超高、坡度、仪器安装等误差,使得测量坐标系与标准椭圆坐标系之间存在三个小角度α、β和γ误差。
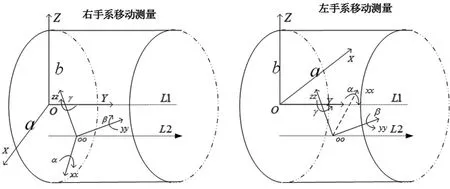
图5 测量坐标系示意图
2.1 绕xx轴旋转小角度误差α
如图6所示,若存在α小角度,则环缝的影像呈现为一根正弦曲线,实际隧道影像平铺图如图7所示:
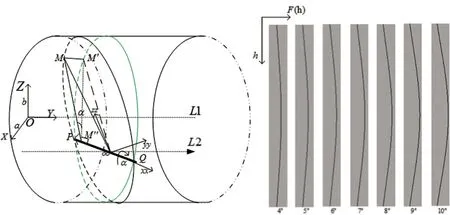
图6 轨道高度变化可产生绕xx轴旋转小角度误差α
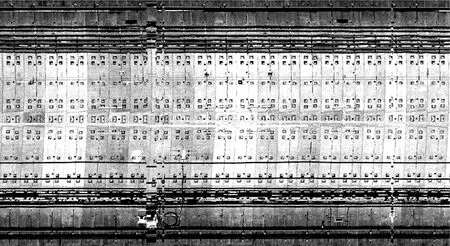
图7 绕xx轴旋转隧道平铺图

2.2 绕yy轴旋转小角度误差β
当发生例如轨道超高的情况下,会产生绕yy轴旋转小角度误差β,如图8所示:
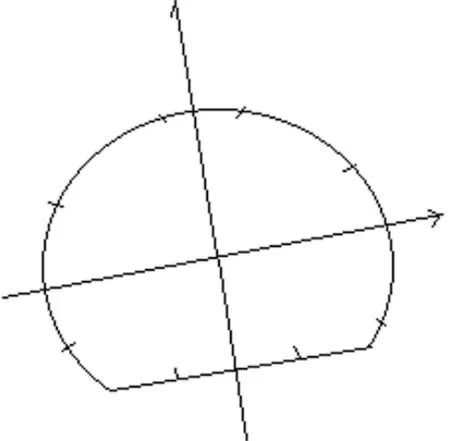
图8 轨道超高示意图
测量坐标系绕yy轴旋转形成小角度误差β,则在平铺图展开时,只是D12345的位置会发生上下移动,如图9所示,通过管片缝直接定位,因此本处不具体讨论分析。
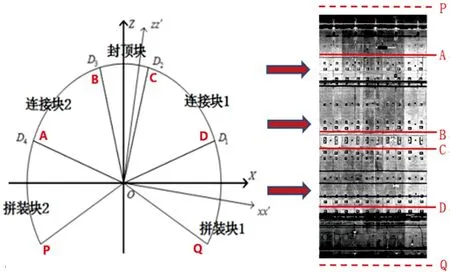
图9 小角度转动示意图
2.3 绕zz轴旋转小角度误差γ
如图10所示,若存在γ小角度,则环缝的影像呈现为一根余弦曲线,实际隧道影像平铺图如图11所示:
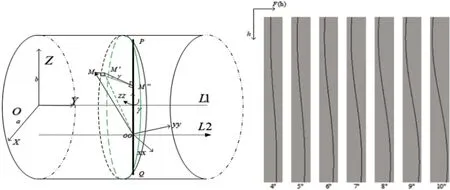
图10 螺旋扫断面与隧道横断面不平行,形成与zz轴小角度偏转误差γ
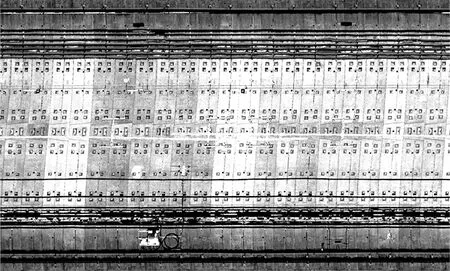
图11 绕zz轴旋转隧道平铺图

2.4 角度综合偏差纠正策略
利用环缝在平铺图中的形状,通过以下4点来纠正角度偏差:
(1)由于三个方向可能存在的角度误差都是小角度误差,在求解时,认为三误差相互独立;
(2)绕yy轴误差β可通过管片缝直接定位,此处不讨论;
(3)绘制图12所示的环缝形状的红线,环缝呈现倾斜状态,等间距选择环缝点,通过数学计算可求解各环缝对应的绕xx和zz轴转动角度偏差α和γ改正值,再纠正所有点云α和γ误差后,重新生成隧道平铺图,纠正后的隧道平铺图呈现竖直状态。
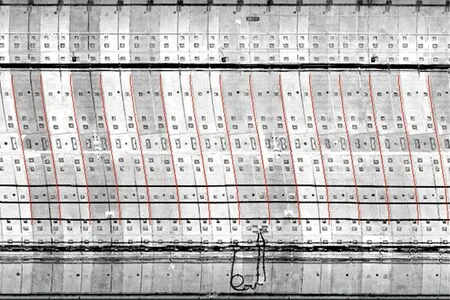
图12 绘制环缝图
YF=(Rsin(2π/3-hj/R)-Xoo)tanγ-(Rcos(2π/3-hj/R)-Zoo)tanα+Yoo(tF)j
(4)中心化处理:理论上扫描仪测量坐标系原点在隧道中轴线上,由于实际作业过程中,测量坐标系原点时时刻刻都在变化,中心化就是计算隧道中轴线,将坐标系原点平移到坐标系上。
3 现场试验案例分析
3.1 试验方案概况
为了验证算法的可靠性和准确性,结合上海市轨道交通某线路收敛测量项目,扫描仪采集多组数据,分别对小角度无偏转及各个方向上偏转的情况进行试验,同时,每个方向上偏转情况再分为正负两个方向。通过解算程序处理,计算得到十组数据的收敛值,分别验证三个小角度α、β和γ误差。为了更好地比较推扫数据的准确性,分别对每种情况进行往返测量,往返两次数据验证数据的真实性。
以上海轨道交通某线路区间数据为例,选取长度为 100 m(800~900环)的代表性试验隧道,定义800~900环方向为行进正方向,返程方向为行进负方向。此区间累计采集10组数据,其中2组为不存在小角度误差的往返数据,4组为存在绕xx轴旋转α小角度误差的往返数据(2组α小角度为正值,2组α小角度为负值),2组为存在绕zz轴旋转γ小角度误差的往返数据(2组γ小角度为正值,2组γ小角度为负值),对10组数据进行数据分析。
3.2 现场试验结果与讨论
如图13所示,选取小角度无偏转状态下的往返数据进行分析,通过往返差曲线图可知,往返差值分布在 ±2 mm范围内,因此可认为小角度无偏转状态下,测量数据是准确可靠的。
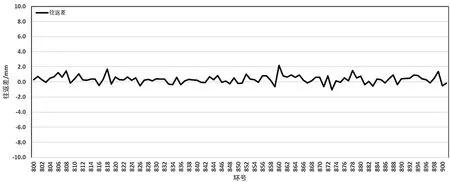
图13 无小角度偏转状态下收敛往返差曲线图
选取小角度无偏转装下两次测量结果取平均,认为平均值为隧道收敛的真值。每次测量结果与真值做比较,结果分析如下:
(1)α小角度误差结果分析
当存在α小角度误差,绘制收敛测量结果与隧道真值的差值曲线图,详细的结果如图14、图15所示。通过试验数据验证可以发现,通过此方法可以有效地提高数据的可靠性与准确性。
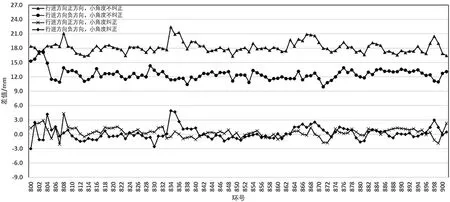
图14 α小角度(正值)往返数据曲线图
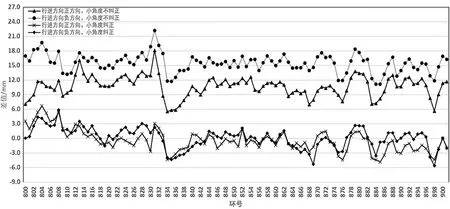
图15 α小角度(负值)往返数据差值曲线图
(2)β小角度误差结果分析
测量坐标系绕yy轴旋转形成小角度误差β,则在平铺图展开时,只是D12345的位置会发生上下移动,通过管片缝直接定位,并不影响测量结果精度,因此本处不具体讨论分析。
(3)γ小角度误差结果分析
当存在γ小角度误差,绘制收敛测量结果与隧道真值的差值曲线图,详细的结果如图16、图17所示。通过试验数据验证可以发现,通过此方法可以有效地提高数据的可靠性与准确性。
图16 γ小角度(正值)往返数据曲线图
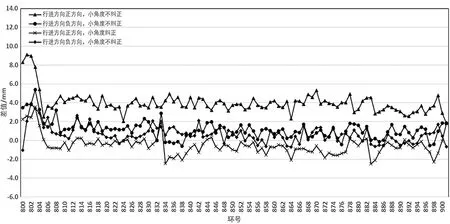
图17 γ小角度(负值)往返数据曲线图
3.3 技术可靠性验证
(1)与传统测量方法对比
为了验证方法的科学性、数据的准确性,因此在采集数据时同时配备高精度全站仪,每隔5环测得隧道收敛值,并对两种方法得到的隧道收敛值做偏差对比,验证系统与算法的可靠性,对计算结果进行比较结果如图18所示。由图18分析可知,三维激光扫描结果与人工全站仪测量结果存在 13 mm的仪器常数差,去除仪器常数的影响,收敛差绝对值均在 3 mm范围内。
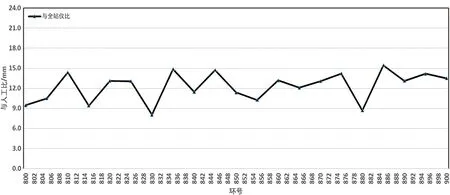
图18 三维激光扫描与全站仪差值曲线图
(2)数据重复性与可靠性验证
为了验证方法的科学性、数据的准确性,因此现场做了多次实验,对计算结果进行比较。扫描仪采集多个区间数据,分别实验三个方向上偏转的情况,同一区域各种情况重复往返推扫了多次,通过大量的实验数据验证,总计对比数据 13 753个,累计重复推扫10余个区间,其中收敛差绝对值在 1 mm以下的有 11 931环,占总比例的86.75%,差值绝对值在1~2 mm的有864环,差值绝对值在2~3 mm的有793环,收敛差绝对值大于 3 mm的有165环,占总比例的1.20%。
4 结 语
为保障城市交通功能的正常实现和人们的生命财产安全,及时、高效、精准发现地铁隧道结构变形和结构病害,为评估隧道结构安全状况提供综合数据,本文依托实际工程为背景,针对三维激光移动扫描在扫描过程中扫描的点云与实际间存在的各种小误差做了详细分析与纠正,采用数值分析的方法,建立三维隧道误差模型。从三维空间及每环点云区间角度分析,得出以下结论:在地铁盾构隧道三维激光扫描作业中,当出现小角度误差时,会严重影响测量结果的准确性,因此计算过程中需要纠正实际作业过程中产生的小角度误差,但需注意的是,因为此方法已经对数据进行了归心化处理,此种方法仅能操作一次。