面向无人集群通信的干扰感知及电磁干扰自动规避方法
2023-11-02刘浩楠
刘浩楠
面向无人集群通信的干扰感知及电磁干扰自动规避方法
刘浩楠
(中国电子科技集团公司第二十研究所,西安 710068)
为提升无人机在复杂电磁环境条件下的通信可靠性,在无人机载通信系统基础之上,研究基于电子战特征的无人机通信干扰感知方法,感知环境电磁特性及干扰信号特征,根据干扰识别结果智能决策自动规避干扰,在最优信道上进行数据通信,能够大幅度提升复杂电磁环境下无人机通信系统的抗干扰传输能力。并构建干扰感知与自动规避的测试验证原理样机,进行外场测试验证,实现无人机(群)对杂波环境的智能化适应,满足日益增长的无人机应用需求。
无人集群通信;干扰感知;干扰规避;复杂电磁环境
0 引言
无人机数据链作为无人机系统的重要组成部分,已广泛应用于无人机系统中,是未来发展的重要方向,但目前无人机数据链在复杂背景下的实用性还需大幅提升[1]。无人机在航行时背景环境复杂多变,由于地形、地物等因素造成的杂波及干扰环境下,大功率、宽频谱的电磁干扰信号将对无人机通信链路的性能产生重大的影响。无人机数据链一般通过扩展通信带宽以抵抗窄带干扰或在不同载波频率进行传输从而规避部分频带干扰。但在复杂频谱环境下,干扰情况复杂,在无电磁环境感知的情况下,使用预设频率或预设跳频通信的可靠性难以保证,且频谱利用率低[2]。
现有无人机数据链抗干扰的方法一般都是基于通信质量测量的被动频率切换方法。目前市场上使用的无人机数据链抗干扰系统,由于是基于通信质量测量的被动频率切换,因此需要先消耗较长时间测量各频率信道的通信质量,然后才能基于各频率信道的通信质量测量结果决策切换频率,无人机集群数量越多,测量各频率信道的通信质量消耗时间就越长[3]。事实上,在无人机集群应用中,无人机快速决策干扰规避方法至关重要。如果决策切换时间过长,容易出现无人机之间通信长期中断,导致关键指令传输失败甚至撞机等事件。
本文的目的是研究基于电子战特征的无人机数据链干扰感知方法,可以在复杂杂波环境下实时进行频谱感知,并基于特征参数提取识别干扰,再根据干扰识别结果及态势感知电磁谱图智能化决策出最优信道,从而自动选择工作频段、波束指向、功率强度和编码方式,能够快速规避干扰,大幅度提升复杂电子环境下无人机数据链的抗干扰传输能力。
1 干扰感知及电磁干扰自动规避原理
本文旨在使无人机在不同的应用任务、不同的杂波环境中以及一定带宽的频谱资源下,合理有效地利用干扰感知、优化决策等技术做到无人机干扰感知及灵巧躲避。无人机干扰感知及电磁干扰自动规避的总体框架是由协同频谱感知、干扰识别智能推理分析、干扰规避自主决策、动态加载以及加载性能评估五部分组成的一个闭环,其流程图如图1所示。
首先利用电磁频谱感知技术,无人机检测得到该工作区域的频谱信息,并通过智能推理模块,分析目前的频谱状况:包括干扰的类型、频段、方位及强度等信息。然后,将分析识别结果送至自主决策模块,决策模块结合网络频谱管理制度、应用业务需求、频谱策略库等多维信息,计算出可保证无人机数据链正常通信的最优干扰规避方案,并通过遥测遥控链路发送新的参数信息告知地面控制终端,地面控制终端实时进行加载评估,确保新加载参数信息的正确性及可用性,最终做到自主规避干扰,提升无人机复杂电磁环境下的通信能力。

图1 自主决策规避干扰闭环流程图
2 无人集群并行协作频谱感知技术
2.1 协作频谱感知原理
利用信道衰落的独立性和多用户分集接收,协作频谱感知方法可以提高频谱感知的检测概率并减少频谱感知时间,而且还可以解决隐藏终端问题[4]。在协作频谱感知架构下,可以采用多种方法来设计控制信道,控制信道既能用于感知节点互通感知信息,还能用于共享信道分配信息。中继节点也能用于协作频谱感知,感知用户通过转发协议进行频谱感知中继,有研究表明该方法能够提高网络的灵活性。协作频谱感知包括中心式及分布式两种,根据无人机集群组网的活动特点,本文选用分布式频谱感知方法。在分布式频谱感知架构下,无人机感知节点与其周围的感知节点交换感知信息,并自主判断当前的可用频段,如图2所示。由于不需要建设数据融合中心,分布式频谱感知的灵活性较高且成本较低[5]。
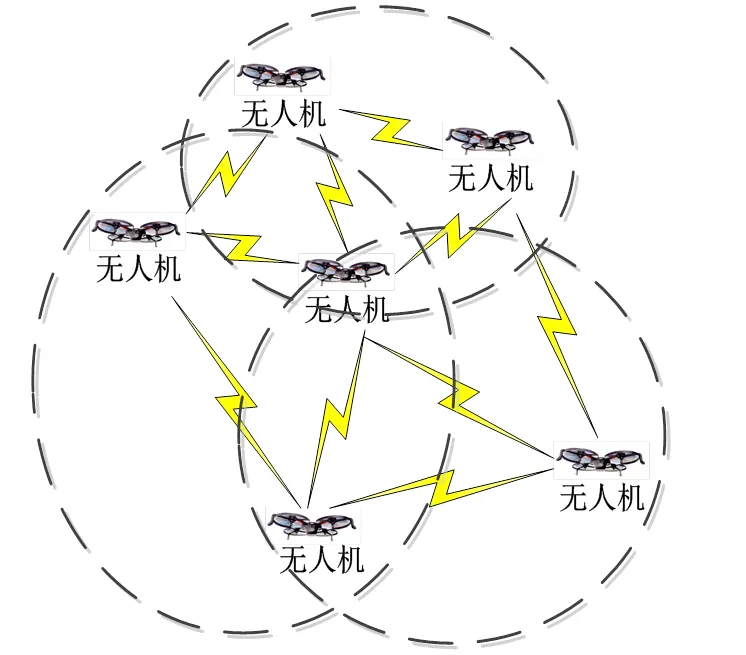
图2 无人集群分布式并行协作频谱感知架构图
基于传感器网络理论研究无人集群的分布式协作频谱感知技术,在满足频谱感知检测分辨率和检测概率的前提下,采用适用于无人机集群的分布式算法自适应分配感知频段和协作感知节点。在同一时刻通过网络节点集合协作感知不同的频段,即在无人集群网络中将无人机节点和频谱作为两种资源进行配对。首先,依据不同节点在不同频段的感知性能及以往感知经验进行初始配对,然后根据当前感知效果实时调整频谱感知节点和感知频段。在满足协作频谱感知性能的要求下,最大化感知频段范围并最小化感知时间,即消耗最少的节点感知更宽的频段,从而提高整个无人机集群的干扰感知效率。
2.2 频谱感知流程
频谱感知监视实现无人机工作频段内的频谱扫描监视功能。频谱感知功能需要将2 400~2 500 MHz和5 600~5 900 MHz频段内的信号进行时频变换,再检测分析其中的信号频率。鉴于需要处理的信号带宽太大,本方案以瞬时侦察带宽60 MHz为颗粒度划分子信道,采用轮询扫描的方式来实现该功能,每个子信道分别独立完成时频变换后在进行拼接分析。以60 MHz的瞬时带宽为步进不断改变下变频本振,使本振从2 400~2 500 MHz和5 600~5 900 MHz循环配置,对工作频段内信号进行不间断扫描。频谱感知处理流程如图3所示。
图3中各子信道的下变频、滤波、抽取、快速傅里叶变换(Fast Fourier Transformation,FFT)求模取对数及带宽匹配抽取功能均在现场可编程门阵列(Field Programmable Gate Array,FPGA)中实现,各子信道频谱数据的拼接及实时分析功能在先进的电子半导体微处理器(Advanced RISC Machines,ARM)中完成。下面分别论述每个模块的实现方式。
1)信道划分
本文采用等间隔划分的方法将无人机工作频段(设总带宽为)的信号划分为/60 MHz个子信道,每个子信道带宽为60 MHz,信道划分示意如图4所示。
完成信道划分后,每个子信道以其中心频点为混频频率进行下变频、滤波及抽取。
2)时频变换拼接分析
经过信道化处理后宽带信号变成了/60 MHz个子信道,每个子信道的数据速率为60 Mbps。下面需要将各子信道分别进行时频变换,并进行拼接后检测分析。
(1)子信道时频变换
由于子信道的数据速率为路和路各60 Mbps,故可采用FPGA中的知识产权核(Intellectual Property core,IPcore)实现FFT功能,进行FFT变换后,使用Cordic算法来实现求模功能,最后采用查表的方式来实现对数功能,其具体实现流程如图5所示。
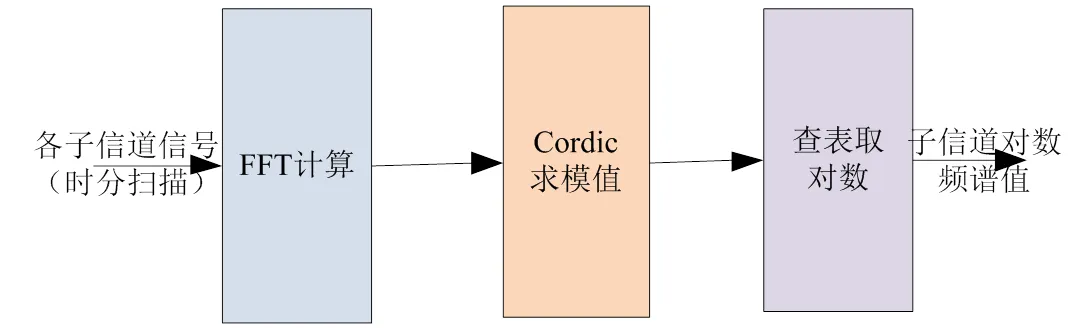
图5 子信道时频变换示意图
FFT变换后为方便后级计算这里采用对数的方式输出。每个子信道带宽为60 MHz,则采样率为120 Msps,采用65 536点FFT则频谱分辨率可以达到1.83 kHz,可以达到很高的信号检测精度。
(2)带宽匹配及拼接
在完成各子信道的对数频谱输出后,每路子信道的采样率为60 Msps,路和路并行拼接后的数据速率为120 Mbps,为与检测分析的带宽相匹配,采用抽取的方式,每10包对数频谱取1包数据进行拼接显示,这样显控接收的数据速率为12 Mbps。抽取后按照信道划分的逆过程即可完成在频谱的拼接如图6所示。

图6 带宽匹配及拼接示意
信号实时频谱计算出后,可根据实时频谱的特征,选择其中指定频段进行进一步信号检测、参数估计及调制方式识别。
3 基于态势感知电磁谱图的智能化干扰规避
3.1 态势感知电磁谱图
本文设计的基于态势感知电磁谱图的干扰自主规避方法,首先将不同的用频参数进行分类,根据参数属性和作用的不同,将用频参数分成三类[8],如表1所示。

表1 用频参数表
从干扰规避算法的角度看,环境影响参数和用户输入参数为“输入”参数,决策输出参数是干扰规避算法“自主决定”的参数。基于态势感知电磁谱图的干扰规避的基本原理是:首先,依据不同区域允许的无人机飞行范围及频率和用户输入参数动态调整无人机工作的频段范围;然后,根据外部环境感知参数分析干扰特征;最后,干扰规避算法根据上述信息,在政策约束下对输出参数进行多目标最优化求解,生成工作频段范围内的态势感知电磁谱图,包括该频段内每个频点的可用性信息和干扰影响情况。其态势感知电磁谱图如图7所示。
从图7可以看出,白色部分(~MHz)的频段由于外部干扰或者政策等原因,该设备将不能使用该频段,其余频段用户将根据频谱资源质量可选择不同发送功率和发送速率进行通信。
3.2 多目标优化的智能化最优决策
根据不同区域允许的无人机飞行范围、频率和用户输入参数动态调整无人机工作的频段范围之后,干扰规避算法将判断外部环境感知参数和应用任务需求参数是否超出用频范围。态势感知电磁谱图生成后,不同的频段不再简单地划分为可用还是不可用,而是根据可用与否、相应功率和相应的速率上限等来进一步细分,即已无法进行通信的频段将设为禁止使用频段,其余频段根据能够正常通信的最低功率和最高速率进行区分。干扰规避算法根据态势感知电磁谱图,选择其中的某一可用频段,并在该频段上进行自主决策。其决策算法如下:
(1)

将多目标函数进行加权求和简化为单目标函数,如式(2)所示
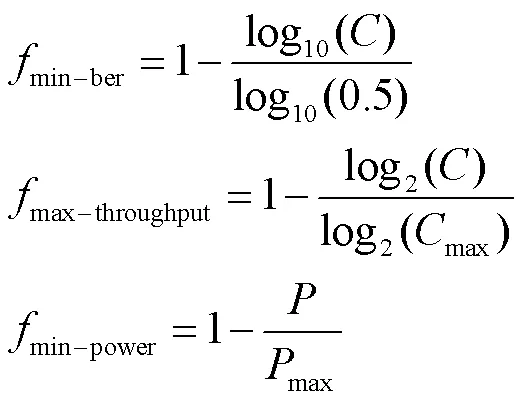
然后,将三个目标函数乘上不同的权值,加权求和简化为单目标的函数如式(4)所示

干扰规避算法求解上式的最优解,从而得到相应的决策输出参数。
最后,按照优化求得的决策输出参数调整无人机通信终端。
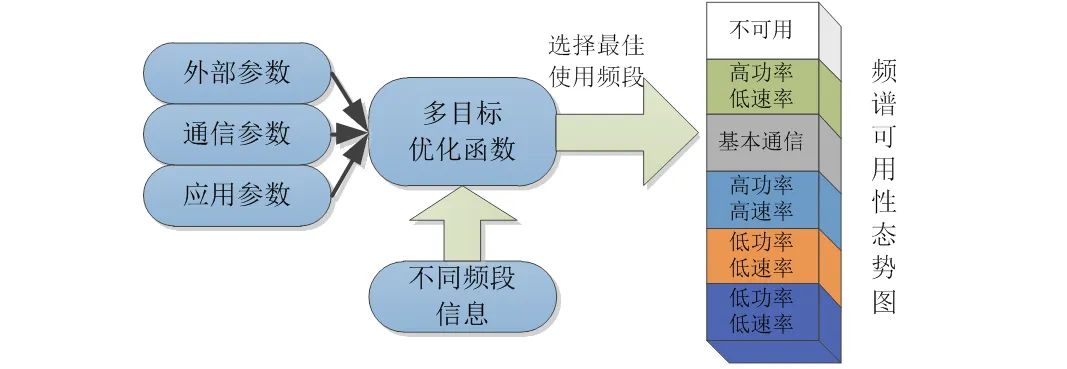
图8 多目标最优化决策示意图
因此,基于态势感知电磁谱图的干扰规避方法,本质上是综合考虑外部电磁环境、飞行区域限制、工作频段约束和应用任务需求等多目标条件,从而求得无人机用频决策的实用性和最优性。
4 结语
本文提出了一种适用于无人集群的干扰感知和自主规避方法。基于电子战特征的无人机数据链干扰感知方法[10],感知环境电磁特性及干扰信号特征,根据干扰识别结果智能决策,从而在最优信道上进行数据通信,能够大幅度提升复杂电子环境下无人机数据链的抗干扰传输能力;利用认知引擎主动感知进行推理可大大降低时间消耗,确保无人机最短的干扰规避决策时间;该方法将时间、位置、外界感知信息等外部因素,结合应用任务用户定义因素,并根据当前频谱管理政策,利用多目标优化算法生成态势感知电磁谱图。利用该态势图,结合网内目前主要使用的业务消息类型,最终计算得到综合最优的干扰规避策略,该决策方法结合更多因素,使最终干扰规避策略具有更好的实用性。
[1] 杨会军,王琦. 国外无人机数据链发展现状及其干扰技术[J]. 航天电子对抗,2016(6):57-59.
[2] 李芸. 面向小型无人机的空地数据链系统研究[D]. 西安:西北工业大学,2005.
[3] 仵敏娟. 无人机数据链的关键技术研究[D]. 西安:西北工业大学,2007.
[4] 张新忠. 认知无线电协作频谱感知技术研究[D]. 哈尔滨:哈尔滨工程大学,2015.
[5] 李佳俊. 认知无线电中协作频谱感知技术研究[D]. 北京:北京交通大学,2012.
[6] 沈家瑞. 通信对抗中的干扰识别技术研究[D]. 成都:电子科技大学,2011.
[7] 郭红敬. 无人机测控链路千扰感知与识别技术研究[D]. 成都:电子科技大学,2017.
[8] 赵杭生,李大力,王凡,等. 动态频谱管理中基于频谱可用性态势图的政策推理策略设计[C]. 频谱管理与监测系统建设研讨会论文集,2011(4):216-226.
[9] 王国强,李金龙,张敏,等. 多目标遗传算法求解认知无线电性能优化问题[J]. 计算机工程与应用,2007,43(20):159-162.
[10] 林伟廷. 无人机数据链能力需求和关键技术发展研究[J]. 无线互联科技,2017(14):140-141.
Interference Perception and Automatic Electromagnetic Interference Avoidance Method for Unmanned Cluster Communication
LIU Haonan
In order to improve the communication reliability of unmanned aerial vehicles under complex electromagnetic environment conditions, based on the communication system of unmanned aerial vehicles, a communication interference perception method based on electronic warfare features is studied. The method perceives the electromagnetic characteristics of the environment and interference signal characteristics, intelligently makes decisions based on the interference recognition results to automatically avoid interference, and conducts data communication on the optimal channel, it can significantly improve the anti-interference transmission capability of unmanned aerial vehicle communication systems in complex electromagnetic environments. And construct a prototype of interference perception and automatic avoidance testing and verification principles, conduct field testing and verification, achieve intelligent adaptation of drones (swarms) to clutter environments, and meet the growing demand for drone applications.
Unmanned Cluster Communication; Interference Perception; Interference Avoidance; Complex Electromagnetic Environment
TN925
A
1674-7976-(2023)-05-363-05
2023-06-02。
刘浩楠(1995.05—),陕西商洛人,硕士,工程师,主要研究方向为无线通信。
“陕西省2022年重点研发计划”项目资助(2022ZDLGY03-03)
