基于LabVIEW的某导航设备卡尔曼滤波方位解算修正技术
2023-11-02杜毅鹏孙伟玮
杜毅鹏,孙伟玮,徐 飞
基于LabVIEW的某导航设备卡尔曼滤波方位解算修正技术
杜毅鹏1,2,孙伟玮3,徐 飞1,2
(1 中国电子科技集团公司第二十研究所,西安 710068;2 陕西省组合与智能导航重点实验室,西安 710068;3 海军装备部)
某导航设备信号常使用卡尔曼滤波算法进行方位解算。为改良卡尔曼滤波噪声系数,确保算法在较短的时间内准确解算设备信号方位值,提出一种基于LabVIEW的卡尔曼滤波方位解算修正技术,通过LabVIEW快速构建信号模型和卡尔曼滤波方位解算模型,完成对卡尔曼滤波初始参数的修正。经测试,该技术有效缩短卡尔曼滤波噪声系数修正时间,可应用于实装工程。
卡尔曼滤波;LabVIEW;方位解算
0 引言
某导航设备为一航空进程导航设备,主要为空中飞行目标提供方位和距离信息,实现飞机极坐标定位。机载设备常使用卡尔曼滤波算法进行方位解算,为有效缩短方位解算时间,且保证方位的解算精度,需要构建卡尔曼滤波方位解算模型,对卡尔曼滤波算法噪声系数进行不断改良[1-4]。
随着计算机仿真技术的不断提高,给卡尔曼滤波方位解算模型的设计提供了必要条件。LabVIEW作为人机交互和可视化功能较强的图形化开发工具,具备与其他仿真软件进行联合开发的能力,能够让用户快速搭建图形化界面和卡尔曼滤波方位解算模型,便捷、高效地完成对设备卡尔曼滤波方位解算噪声系数的改良[5-6]。
1 卡尔曼滤波简介
卡尔曼滤波由卡尔曼于1960年提出,是一种通过系统输入输出观测数据,对系统状态进行最优估计的算法。卡尔曼滤波状态方程和观测方程如式(1)和式(2)所示






2 功能设计
基于LabVIEW的某导航设备卡尔曼滤波方位解算仿真显控界面如图1所示,其中可设置的系统参数有:模拟角度、工作模式、仿真数据时间、过程噪声和测量噪声。在设置完系统参数后,点击“角度模拟”按钮,即可显示设备模拟信号和方位解算过程信息。

图1 卡尔曼滤波方位解算仿真显控界面
本文通过LabVIEW调用仿真软件快速搭建卡尔曼滤波仿真程序,其中包括信号模型仿真、卡尔曼滤波方位解算模型仿真两部分。
2.1 信号模型
模拟信号采用振幅调制(Amplitude Modulation,AM)、相位调制(Phase Modulation,PM)两种调制方式,其中AM调制包络函数表达式如式(8)所示

式中:为直流分量;为15 Hz调制度;为135 Hz调制度;、为15 Hz、135 Hz角频率;为模拟角度(弧度)。某导航设备AM调制包络仿真如图2所示。
设备信号PM调制即脉冲序列设计,包括主基准脉冲群、辅基准脉冲群、随机填充脉冲和应答脉冲(非识别状态)。脉冲设计最小单元为高斯单脉冲,其数学表达式如式(9)所示

式中:为脉冲幅度;、为常数。
根据式(9)和某导航设备国军标要求,获得主基准群、辅基准群、随机填充脉冲等脉冲序列。将符合国军标要求的有序设备脉冲序列与式(8)相乘,即为设备模拟信号,如图3所示。

图3 设备模拟信号仿真
2.2 方位解算模型
信号精确方位解算的关键在于主、辅基准定时点以及15 Hz和135 Hz包络过零点的准确定位,如何建立合理的设备信号状态方程和观测方程是卡尔曼滤波提取信号包络求解方位的关键。








结合卡尔曼滤波观测方程,得到观测矩阵如式(15)所示
设置噪声协方差矩阵Q、R初值,结合式(3)~式(7),建立卡尔曼滤波方位解算模型,模型工作流程如图4所示。



3 仿真结果
启动卡尔曼滤波方位解算仿真显控界面,设置模拟角度为53.4°,工作模式为0(模式),仿真数据时间为100 s。配置过程噪声和测量噪声,运行卡尔曼滤波方位解算仿真程序,观察输出的15 Hz精测结果,如图5所示。

图5 参数未优化15 Hz精测结果
多次优化过程噪声和测量噪声后,运行卡尔曼滤波方位解算仿真程序,观察输出15 Hz精测结果,如图6所示。
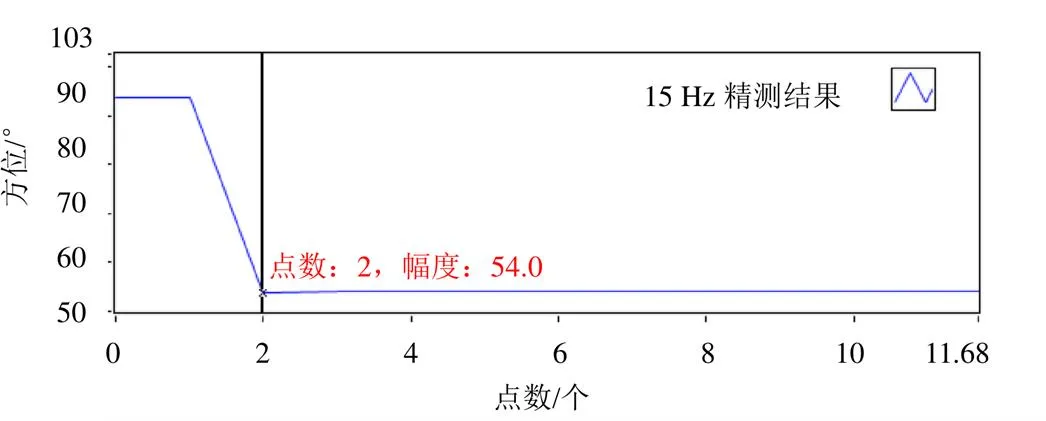
图6 参数优化后15 Hz精测结果
可以看出,在优化过程噪声和测量噪声后,卡尔曼滤波方位解算算法由迭代32个点变为2个点,解算速度大幅增加,同时方位解算精度基本保持不变。
4 结语
本文设计了一种基于LabVIEW的某导航设备卡尔曼滤波方位解算修正技术,通过模型仿真和实际工程设计验证了该技术的正确性和可行性。该技术通过不断改良卡尔曼滤波噪声系数,在保证方位解算精度的同时,有效缩短算法解算迭代时间,满足项目实际使用需求。
[1] 刘齐. 塔康信标模拟器软硬件系统设计与实现[D]. 成都:电子科技大学,2018.
[2] 姚文臣. 某型塔康地面台模拟技术研究[D]. 郑州:郑州大学,2011.
[3] 庞育才. TACAN信号处理仿真分析及硬件系统方案设计[D]. 哈尔滨:哈尔滨工程大学,2013.
[4] 周振国. 塔康系统关键技术的研究与塔康测位的实现[D]. 西安:西安电子科技大学,2013.
[5] 王微. 基于LabVIEW和MATLAB联合编程的天线仿真实验程序设计[D]. 昆明:云南大学,2019.
[6] 王水鱼,王小娟. 在虚拟仪器中实现LabVIEW与MATLAB的无缝链接[J]. 计算机系统应用,2012(11).
[7] 张凯,姜静,刘迪. 一种基于Matlab与VisualC++混合编程实现Kalman滤波方法[J]. 仪表技术,2015(1).
[8] 郭晓晨. 基于Starview ICS系统的自适应卡尔曼滤波在管道泄漏检测中的设计与实现[D]. 长春:吉林大学,2017.
[9] 张国祥,郭英,霍文俊,等. 基于Kalman滤波的塔康方位精确解算方法[J]. 空军工程大学学报(自然科学版),2013(2).
[10] 王焱滨,袁仁清,杨云志. 一种基于扩展卡尔曼滤波的方位跟踪算法[J]. 电讯技术,2006(2).
Navigation Equipment Kalman Filter Azimuth Solution Correction Technique Based on LabVIEW
DU Yipeng, SUN Weiwei, XU Fei
The navigation equipment signal is usually solved by Kalman filtering software. In order to improve the Kalman filter noise coefficient and ensure that the algorithm can accurately calculate the navigation equipment signal azimuth value in a short time, a navigation equipment Kalman fiter azimuth solving correction technology based on LabVIEW is proposed, and the navigation equipment signal model and Kalman filter azimuth solving model are rapidly constructed by LabVIEW. The initial parameters of Kalman filter are modified. The test shows that the technology can shorten the correction time of Kalman filter noise coefficient effectively, and can be applied to the actual installation project.
Kalman Filter; LabVIEW; Azimuth Solution
TN95
A
1674-7976-(2023)-05-349-04
2023-05-16。
杜毅鹏(1993.12—),陕西西安人,硕士,工程师,主要研究方向为陆基无线电导航。
