三维激光扫描仪在多测合一项目中的应用
2023-11-02彭维祥
彭维祥
(漳州市测绘设计研究院,福建 漳州 363000)
随着国家“放管服”改革的重大决策的实施,《国务院办公厅关于全面开展工程建设项目审批制度改革的实施意见》(国办发〔2019〕11号)明确指出“多测合一”制度的实施方向。在漳州市区,规划核实测量已整合绿地测量和地下管线测量,而用地复核测量和人防测量是可利用规划核实测量中的数据进行完成。此阶段的“多测合一”主要任务则是实现规划核实测量与不动产测绘完成同一标的物只测一次的目的。随着多测合一的实行,以及漳州市相关审批部门对规划核实测量成果中建筑物的分层平面图提出了新的要求,需要在分层平面图上增加内、外部墙体及柱体的绘制。随着测量要求及内容的增加和政策的推进,如何快速高效地进行外业数据采集,绘制更高精度的成果图已成为当前的研究的热门。
当下“多测合一”项目中大多采用GNSS-RTK配合全站仪测绘以及结合无人机辅助测量的方法,此方法受作业环境影响较大,数据采集效率低等局限性。相较于传统的作业方式,三维激光扫描点云实景技术以其全要素高精度、高分辨率、高效率采集的特点,能够满足“多测合一”项目的技术和时限要求,文章将结合具体实例阐述三维激光扫描仪结合传统测量方式在“多测合一”项目中的具体应用。
1 基本概述
1.1 背景介绍
规划核实测量工作内容包括竣工总平面图测绘、面积测算、建筑高度测算、建筑间距测算、建筑退让红线距离测算、主要技术经济指标测算和规划比对等内容;房屋的不动产测绘包含不动产权籍调查、房屋调查、房产测绘等内容。这两项测绘任务基本属于所有测绘任务中最后两项,随着“多测合一”改革的推进,越来越多的规划核实测量与动产测绘被一同委托。
在这两项测绘任务中,都存在建筑物的测绘,同时根据国家规程及地方要求,对于建筑物的测量要求大致相同,高效率、高精度的完成建筑物的测量成为当前任务的重点。而三维激光扫描仪正好能满足这些要求,本次将三维激光扫描仪应用于具体项目中,详细介绍建筑物测绘的流程,通过实验数据从而更好地了解其在“多测合一”项目中的表现。
1.2 项目概况
该幢建筑物属于某新建项目,总规划用地面积约5 490 m2,该幢建筑物面积约5 300 m2。由于是刚建好的建筑物,测区内主要以建筑物、内部道路以及部分低矮绿化植被为主,场区不存在高大遮挡物,测量条件较好,比较适合三维激光扫描仪进行测量。同时该建筑物存在地下室,地上建筑隔间较多,内部结构较为复杂,一、二、三层结构均不相同,三、四层结构类似,能更好地验证三维激光扫描仪的效果。
1.3 设备简介
此次采用FARO FocusS 350进行数据采集,它是一款高速三维激光扫描仪,适用于详细的测量和文件记录,采用激光技术,能够在几分钟内为复杂的环境和几何图形制作出细节丰富的三维图像。它的工作原理是将红外线激光束射到旋转光学镜的中心。该光学镜将使激光光束在围绕扫描环境垂直旋转的方向上产生偏差;之后将周围对象的散射光反射回扫描仪。在测量距离时,激光扫描仪采用相位偏移技术,在该技术中,从扫描仪持续向外投射不同波长的红外光。当接触到对象后,会反射回到扫描仪。通过测量红外线光波的相位偏移,即可准确判断扫描仪到对象的距离。借助特殊的调制技术,HYPERMODULATIONTM可大幅提高调制信号的信噪比。之后,通过使用角度编码器测量的镜像旋转和水平旋转,计算各点的 x、 y、 z 坐标。
2 作业流程
作业流程可分为:前期踏勘规划、控制测量、外业数据采集、内业点云处理、要素提取和成果绘制输出。
2.1 前期踏勘规划
在接到任务后,根据委托方提供的施工图以及现场踏勘情况,初步了解建筑物的内部细节以及结构层次等信息后,同时结合点云拼接软件FARO SCENE可自动对顺序测量的测站进行自动数据配准的特点,设计扫描路线。
2.2 控制测量
利用周边已有GNSS等级平面控制点及等级水准点校正检查后,采用GNSS-RTK完成测区周边3个图根控制点的测量。布置标靶3个,利用徕卡TS02全站仪,对标靶进行测量。
2.3 点云数据采集
实际作业时,根据规划路线进行数据采集,采集时应尽量满足测量需求,遮挡严重时可适当增加测站,以保证数据能够完整拼接。在扫描过程中,依据测站位置与扫描对象的距离、扫描对象的复杂程度等进行综合分析,选择最有效的参数。
2.4 内业处理
2.4.1 点云处理
利用FARO SCENE软件进行数据的配准。配准时,软件会显示每一站的配准精度及重叠率,同时还会显示测站的连接关系。作业人员可以很直观地对配准精度及情况进行分析,手动纠错。利用软件的标靶功能,获取正确的点云数据坐标。见图1。待所有的数据处理完成后,去噪后,导出为完整的点云数据。

图1 点云数据显示
2.4.2 要素提取
利用Autocad ReCap Prp 2023软件加载导出的数据,通过剖面截取功能,选择合适的位置及高度对三维点云数据进行横截面截取。截面获取后,利用点云提取截面线功能。依次对不同层次进行要素提取,生成整幢房屋的平面图的初步成果。
2.4.3 成果绘制输出
规划核实测量成果:在房屋分层图的基础上,依据相应的规程、规范完成建筑基底面积、建筑面积的测算、竣工规划比对、建筑功能、配套设施核实等工作。同时根据房屋分层图外轮廓绘制建筑物地形图,基于此完成建筑间距测算、建筑退让红线距离测算等工作。
不动产测绘成果:根据房屋分层平面图,绘制出房产分层图,利用房产软件即可完成房产测量。
至此,规划核实测量及不动产测绘中关于房屋测量的难点问题基本都已解决,其他所需要的建筑物的属性信息也可通过点云模型进行提取。
3 精度分析
3.1 精度要求
根据《福建省工程建设项目“多测合一”综合技术规程》(2022版)要求:对于一般建筑物规划核实测量及不动产测绘中边长测量精度要求均为中误差(m) 0.014 +0.0007D,限差(m)0.028+0.0014D,其中D为边长,以米为单位,当D小于10 m时,以10 m计;建筑物细部点、特征点测量相对邻近控制点的点位中误差为±5 cm;不动产测绘中房屋测算精度要求为中误差0.02+0.001S(m2),限差0.04+0.002S(m2),其中S为面积,以平方米为单位。
3.2 数据分析
为了验证三维激光点云模型精度,通过全站仪实测平面坐标与三维激光扫描测量坐标对比,求取该幢建筑物三维激光点云模型中误差,计算公式为:
式中,Δ为观测值与真值之差;n为观测值个数。采用全站仪对该幢建筑物11处房屋角点进行了测量,如表1所示,根据公式(1)计算平面精度中误差为±0.011 m;由计算公式可得,平面最小误差为0.005m,最大误差0.016 m。通过对比可知,平面精度满足规划核实测量的精度要求。
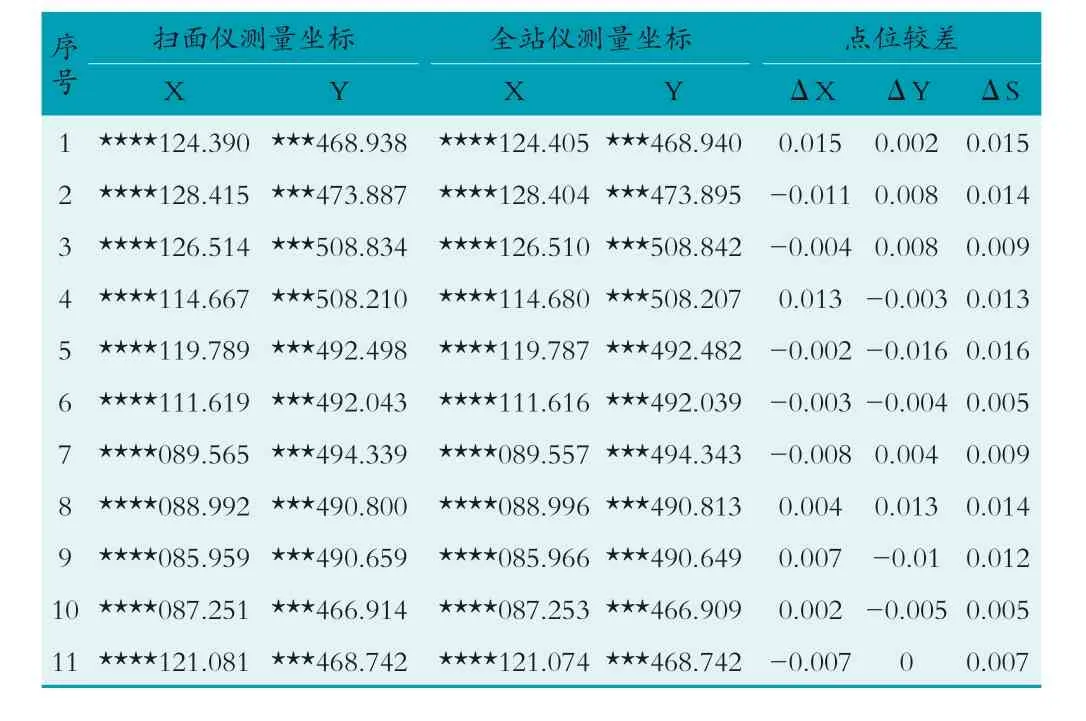
表1 扫描仪与全站仪坐标精度统计 单位:m
同时利用测距仪、卷尺量取建筑物内外部分长度14处,数据详见表2,根据公式(1)计算边长较差中误差为±0.009 m,长度最小较差为0.005 m,最大较差为0.020 m。根据精度要求可知,对于一般房屋,规划核实测量及不动产测绘中,边长精度满足规划核实测量及不动产测绘的精度要求。

表2 点云成果提取与丈量尺寸精度统计 单位:m
规划核实测量建筑面积为5 331.44 m2,不动产测绘中房产面积为5 222.27 m2。根据公式限差S=0.04+0.002S,计算得知限差为13.35 m2。扣除因计算方法导致的差异后计算差异面积:
S=|5331.44-(5222.27+117.29×0.02+17.68×0.02+112.23×2×0.02+32.86×0.02+1.58+1.29+1.9 3+2.42+0.74+1.31+42.21×2+1.54×3|=3.01<13.35
通过计算可知,房屋测算精度满足不动产测绘的精度要求。
4 结束语
(1)FARO FocusS 350三维激光扫描仪操作简单,可自动测量且具有相邻测站自动拼接功能,能高效完成建筑物测量的内外业工作。
(2)实例应用的三维激光点云模型平面精度中误差达到±0.011 m,边长较差中误差为±0.009 m,房屋面积差异3.01 m2, 验证了三维激光点云模型的绝对精度,同时证明了利用地面三维激光扫描仪技术可高质量完成规划核实测量及不动产测绘中的建筑物测量工作。
(3)通过文章项目应用研究,对地面三维激光扫描技术在“多测合一” 测绘项目中的应用研究具有指导意义。
