基于SLAM的避障消毒机器人设计与研究*
2023-10-29吴旭平马浩浩韩伟亮
吴旭平,马浩浩*,韩伟亮,穆 彤,张 彬
(1.天水师范学院机电与汽车工程学院,甘肃 天水 741001; 2.黑龙江大学电子工程学院,黑龙江 哈尔滨 150080)
0 引言
近年来,随着新冠疫情的影响,公共场合消毒工作成为一项必要措施[1]。然而,人为清扫工作效率低,成本高等问题突出,难以高效进行公共场合的消毒工作。
随着智能化的不断普及,本文基于SLAM算法,实现消毒机器人的避障功能,可以在人群、障碍物诸多的场合进行有效的消毒工作,提高其工作效率。
1 消毒机器人整体结构设计
1.1 组成部分
如图1,避障消毒机器人由机器人端和电脑端两部分组成。机器人端由视觉传感器、控制部分、消毒部分、底盘驱动部分等组成。电脑端主要负责程序的正常运行,监看并遥控避障消毒机器人的正常运行。

图1 避障消毒机器人整体结构
1.2 系统设计
如图1、图2、图3所示,一种具有避障功能的消毒机器人,包括机器人消毒箱,机器人消毒箱的底部转动连接有全向轮,机器人消毒箱的顶部固定连接有立柱,立柱的顶端设有喷雾机构,机器人消毒箱的四周固定连接有红外感应器,机器人消毒箱的四周边角设有弹性机构,弹性机构包括固定于机器人消毒箱一侧的弹簧一,弹簧一的一端固定连接有减震板。减震板的材质为橡胶材质,且弹簧一的材质为不锈钢材质。喷雾机构包括套设于立柱顶端的卡头,卡头的外围开设有若干个喷雾口,卡头的一端连通有水管,水管的一端连接有增压泵。卡头的一端固定连接有搓盘,搓盘的一端固定连接有弹簧二,弹簧二的一端固定连接有固定板,固定板一侧固定于立柱的内壁上。机器人消毒箱的内部底端固定连接有驱动电机,驱动电机的输出端固定连接有固定杆,固定杆的外表面固定连接有搅拌块。固定杆远离驱动电机的一端固定连接有丝杆,丝杆与固定板活动连接,搓盘的一侧与丝杆滑动连接,卡头的两侧固定连接有滑块,立柱的顶端位于滑块处开设有滑槽。

图2 避障消毒机器人的弹性机构结构局部
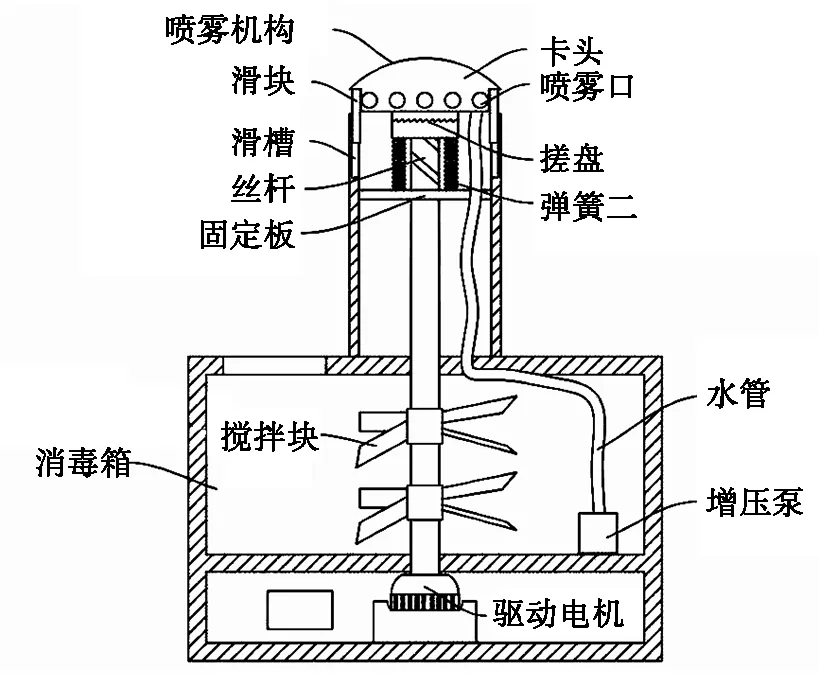
图3 避障消毒机器人的内部结构
与现有技术相比,本文所述的一种具有避障功能的消毒机器人,通过设有弹性机构可以在碰撞时减少机器人所受到的伤害,且通过喷雾机构可以控制喷雾口的调整,可以控制喷雾口的隐藏,减少对空气中的灰尘吸附,对喷雾口的喷雾效果进行保护,且通过搅拌块可以使内部的消毒液混合更加均匀。
1.3 工作原理
使用时,通过全向轮控制机器人消毒箱的行进方向,在移动过程中,通过红外感应器感应位置信息,及时进行避让,通过减震板和弹簧一的安装,可以减小因碰撞后机器人所受到的伤害,在移动过程中,驱动电机控制固定杆转动,通过搅拌块对机器人消毒箱内部的消毒液进行搅拌,进而通过搓盘下半部在丝杆上移动,控制卡头的位置使喷雾口漏出,之后通过搓盘之间的搓动,且通过弹簧二的弹性,可以控制卡头的位置固定,以此同时增压泵通过对消毒液增压,将其通过水管的输送从喷雾口喷撒出。
2 SLAM关键技术
定位问题和地图寻址问题是SLAM主要解决的两个问题。当机器人进入一个陌生的环境,SLAM就可以帮助机器人在这种环境下运行的过程中避开环境中的障碍,及时感知所处周围环境和空间关系。最终达到保证机器人在陌生环境下安全运行到达目的地[2]。
主流的SLAM算法包括HectorSLAM、Gampping、KartoSLAM、LagoSLAM、CoreSLAM。
其中,Gampping是一个开源算法。它的优点是可以快速准确地构建小型场景地图。由于本文研究的避障消毒机器人广泛应用于小型场景,故本实验使用Gampping算法。
如图4所示,SLAM总共分为三个步骤:感知、定位、建图,最终解决的问题是确定机器人位置。感知:机器人利用传感器来感知周边环境。定位:通过传感器传来的消息来进行快速定位。建图:通过传感器往返的信息推测出机器人自身的位置和周围的环境,反映出实时地图,使用测距单元来帮助确定位置[3]。

图4 整体视觉SLAM流程图
3 控制系统设计
3.1 硬件设计
3.1.1 激光雷达
根据使用的传感器不同,消毒机器人SLAM技术可分为视觉SLAM[4]和激光SLAM技术。由于本次实验使用的是激光SLAM技术,所以机器人的传感器是激光雷达激光直接成型技术(laser direct structuring,LDS)。表1为激光雷达参数。
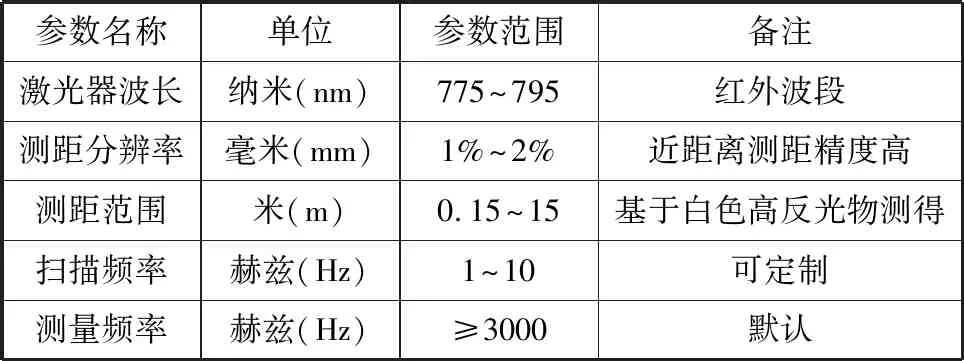
表1 激光雷达参数
3.1.2 OpenCR控制板
OpenCR是TurtleBot3的主控制器板,主要负责控制消毒机器人的行动。具有尺寸小、待机时间长等优点。
3.1.3 树莓派3B+
树莓派3B+是在原来树莓派3B的升级版,采用了BCM2837B0型号CPU构建,是3B版本的博通处理器的升级版本,更新版本进行了性能和散热器优化。
3.2 软件设计
Gmapping是基于滤波SLAM框架的常用开源SLAM算法[5]。Gmapping可以实时构建室内地图,构建小场景地图所需的计算量较小且精度较高。相比Hector SLAM对激光雷达频率要求低、鲁棒性高;而相比Cartographer在构建小场景地图时,Gmapping不需要太多的粒子并且没有回环检测,因此计算量小于Cartographer而精度并没有差太多。
4 消毒机器人地图构建与路径规划仿真
本文采用地图构建与路径规划仿真来模拟消毒机器人的自主避障功能,如图5所示。
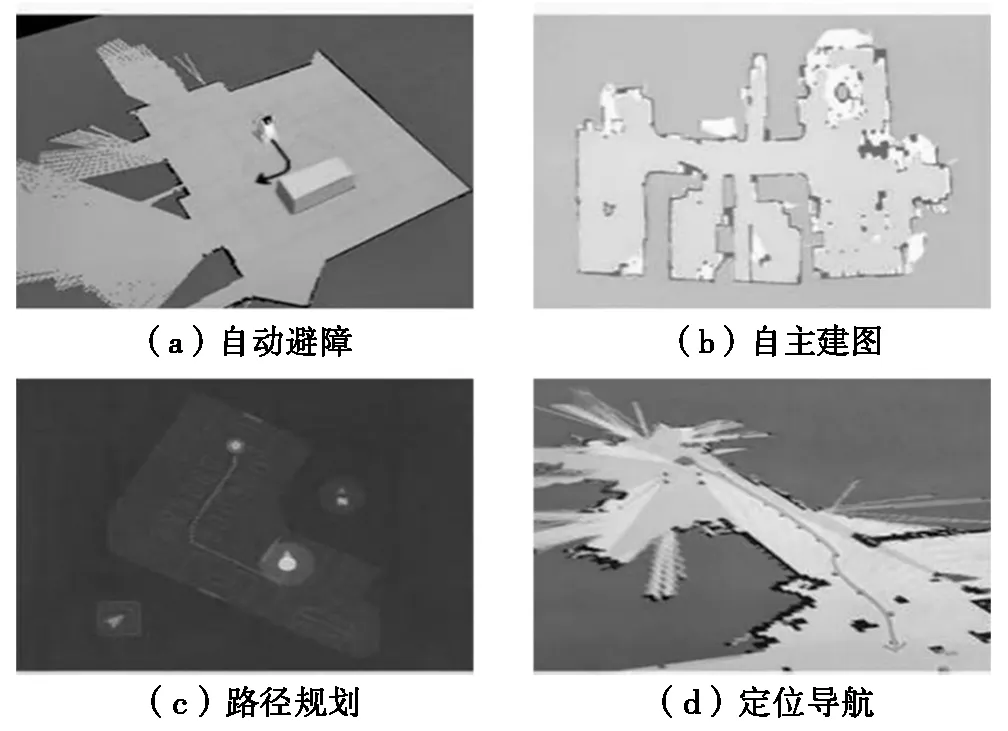
图5 建图规划
5 结语
本文主要从消毒机器人结构设计和控制系统设计两方面展开研究,基于SLAM算法来实现消毒机器人的自主避障功能,进而提高消毒机器人的工作效率,有效解决公共场合消毒效率低、成本高等问题。