摩托车考试桩考项目中撞杆的综合评判方法
2023-10-29刘学博郭晶晶
刘学博,郭晶晶
(山西省信息产业技术研究院有限公司,山西 太原 030012)
0 引言
公安部162号部令、机动车驾驶人考试内容和方法(GA 1026-2022)、《机动车驾驶人考试系统通用技术条件第1部分:总则》(GAT 1028.1)、《机动车驾驶人考试系统通用技术条件第2部分:驾驶理论考试系统》(GAT1028.2)、《机动车驾驶人考试系统通用技术条件第3部分:场地驾驶技能考试系统》(GAT 1028.3)等文件对摩托车场地驾驶技能考试做了明确要求。桩考项目图形及设施如图1所示,在桩考项目过程中,车辆按图2考试流程进行绕桩。

图1 摩托车桩考项目图形及设施

图2 车辆运行路线示意
目前在摩托车驾驶技能考试中桩考项目的碰擦桩杆的检测通常采用GNSS定位或震动传感器来检测。但是在考试过程中,可能因外界环境的影响,比如桩杆会受风力等作用影响而产生摇摆现象,从而容易导致考试误判,可靠性不是很强。
1 GNSS
GNSS是个多系统、多层面、多模式的复杂组合系统,通过解码卫星发布的导航电文实现定位计算,因其具有全天候、实时的定位服务被广泛应用于各种领域。如今场地驾驶技能考试系统基本都是基于载波差分定位技术实现车辆的实时定位,定位误差在厘米级。
在GPS测量时,接收机天线的相位中心位置决定观测值,而天线的相位中心与其几何中心,在理论上应保持一致,但随着信号输入的强度和方向不同,可能会产生厘米级的位置偏差[1]。卫星接收天线天顶方向的增益最大,为确保捕获更多卫星信号,天线阵面普遍以水平方式安装[2]。在摩托桩考项目绕桩过程中定位天线俯仰角可能发生变化,天线阵列相对于水平方向的倾斜角也随之不断变化,因此会影响定位的精度。
2 震动传感器
震动传感器作为一种震动信号采集的敏感元件,可以拾取特定目标的激励信号,通过信号调理与放大电路处理,送入嵌入式处理器中进行处理、分析、计算,通过无线通信方式将检测结果向外传输,实现信号识别,具备对监测对象进行数据采集、处理和传输的功能[3-4]。
传统的有线震动传感器布线复杂、损坏率高、体积较大、隐蔽性差,采用无线震动传感器能够避免上述缺点。本文使用HS-SKT-3A与HS-RecM-WX-1A无线震动传感器,利用2.4G技术实现无线传输,无需串口服务器,体机小巧,可直接放于杆内,支持CAN总线输出,接入更便捷。在空旷无遮挡的条件下通讯距离可达60 m。
3 碰擦桩杆评判方法
3.1 基于GNSS评判方法
利用测绘工具将桩考项目按照下图3所示要求,完成桩杆点位置坐标的测绘及相关区域标定工作。
在车辆按照考试要求行驶过程中,实时轮询计算桩杆点是否落入到由摩托车外廓组成的封闭区域中,如果桩杆点落入到区域则判定碰擦桩杆,实现代码如下:
public static bool IsPointInRegion(PointModel voPoint, PointModel[] voRegion)
{
if (voRegion == null)
returnfalse;
int num=0;
int index=0;
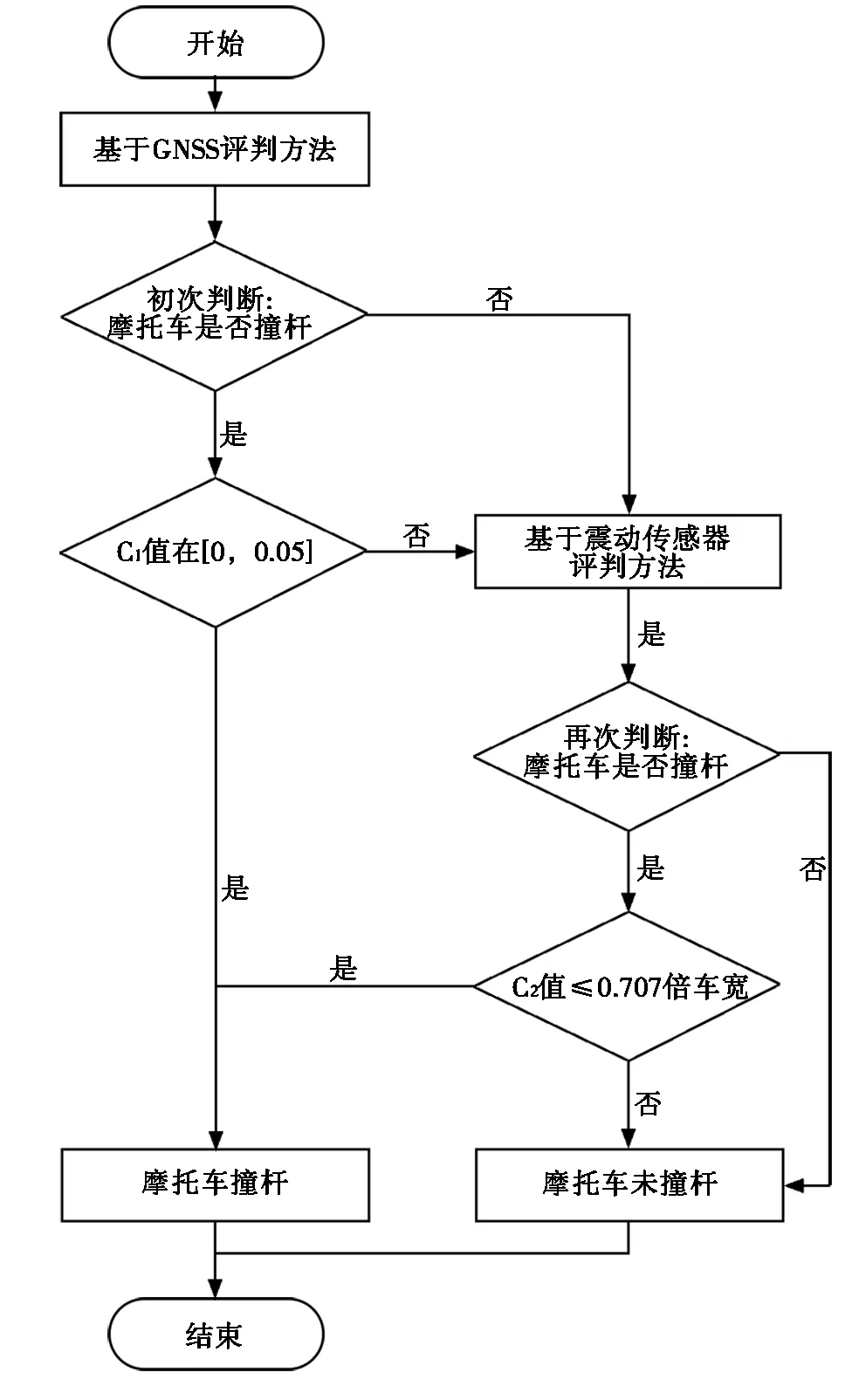
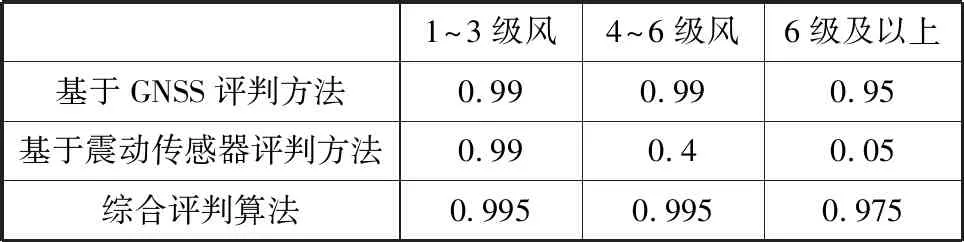
for (int i=0; i { if (i == (voRegion.Length - 1)) { index = 0; } else { index++; } if (voRegion[i].YValue <= voPoint.YValue) { if ((voRegion[index].YValue >voPoint.YValue) &&(IsLeft(voRegion[i], voRegion[index], voPoint) >0.0)) { num++; } } else if ((voRegion[index].YValue<=voPoint.YValue) &&(IsLeft(voRegion[i] , voRegion[index] , voPoint) <0.0)) { num--; } } if (num==0) { return false; } return true; } 结合考试现场环境,分别在每个桩杆上安装无线震动传感器,当考生车辆碰擦任一桩杆时,相应的传感器会将震动信号传至接收端,接收端则判定碰擦桩杆,具体实现代码如下: public bool CheckSensorResult(Sensor sen,ref int num) { if (sen==null||sen.Count<=0) return false; for (int i=0; i { num=i; return true; } } 上述两种评判方法都存在一定的局限性,均不能较好的实现碰擦桩杆的评判。本文结合GNSS定位及震动传感器评判方法的优势,同时为每个方法加入可信控制变量C1、C2,取值[0,1]。具体步骤如下: 1) 实时获取基于GNSS评判方法的评判结果,同时将GNSS定位天线进入项目前后的俯仰角变化率C1,俯仰角变化率越小表明可信度越高,C值取1的概率越大;C1取值在0~0.05范围内时,C1值可取为1。 2) 实时获取基于震动传感器评判方法的评判结果,同时根据GNSS定位天线和桩杆点获得测绘坐标的欧式距离C2,距离越小标明可信度越高,C2值取1的概率越大;C2≤0.707倍车宽时,C2值可取为1。 3) 获取最终评判结果。 综合评判算法流程图如图4所示。 图4 综合评判算法流程图 算法首先使用基于GNSS评判方法(算法1)判断摩托车是否撞杆,当算法1判断摩托车撞杆后,为了保证算法的准确性,按照俯仰角变化率C1的大小确定可信控制变量,当C1值在0~0.05内,可信控制变量C1取为1,此时确定摩托车撞杆。 当算法1判断摩托车未撞杆,则再次使用基于震动传感器评判方法(算法2)判断摩托车是否撞杆,当算法2判断摩托车撞杆后,按照定位天线和桩杆点测绘坐标的欧式距离C2的大小确定可信控制变量,当C2≤0.707倍车宽时,可信控制变量C2取为1,此时确定摩托车撞杆,反之判定摩托车未撞杆。 本文所提方法在晋城市宝通科目二考试场进行验证分析,使用车型分别为五羊本田WH150-3C(二轮)、宗申ZS150ZH-16E(三轮)。 为了对实验的有效性进行评估,将基于GNSS评判方法和基于震动传感器评判方法作为综合评判算法的对比算法。三种算法分别进行200次评判实验,并由人工进行验证,测试时间段天气良好,无风,温湿度正常。撞杆准确率结果如表1所示。 表1 不同算法的撞杆准确率 因震动传感器易受外界环境影响,为验证本方法的有效性,分别在不同天气进行测试,并由人工进行验证。为保障实验安全性,本次实验仅使用三轮车型作为实验对象,其中1~3级风、4~6级风天气评判实验各100次,6级及以上大风天气评判实验40次。撞杆准确率结果如表2所示。 表2 不同风级的撞杆准确率 从表1和表2中可以看出,当天气良好无风时,两种车型使用综合评判算法的准确率都高于其余两种对比算法。风级不同时,三轮使用综合评判算法的准确率也优于其余两种对比算法。由此可知,本文提出的综合评判算法,既能克服基于GNSS评判方法中因倾斜角变化引起的定位误差的问题,又能避免基于震动传感器评判方法因天气原因导致的准确性不高的缺点,检测结果更加有效。 实验证明本文提出的桩考撞杆评判方法,简单有效,可操作性较强,可以准确地评判出车辆撞杆,符合公安部交通管理科学研究所相关检测要求。在摩托车驾驶人场地驾驶技能考试系统的桩考项目撞杆检测有一定的参考价值。3.2 基于震动传感器评判方法
3.3 综合评判算法
4 实验分析

5 小结