基于事件的中药袋卷储盘开盘输送系统设计与分析
2023-10-29谷洪阳张敏良
谷洪阳,张敏良
(201620 上海市 上海工程技术大学 机械与汽车工程学院)
0 引言
中药是华夏民族的宝藏,2020 年,中医药管理局发布了英文版新冠肺炎中医药诊疗方案,中药的独特作用得到国际认可[1-2]。中西医结合为一些疑难杂症治疗提供了新方法,是中医对世界医疗的贡献。目前中药有1 120余种,临床常用的有225种。
随着科技发展和人民生活水平的提高以及中药的国际化,中药的用量逐年增大,中药生产基本实现产业化,配药从过去称量配药变为定量小包装方式[3],提高了配药速度。但是在配药、煎药环节仍然主要靠人工,效率低,不能适合现代化发展要求,影响中药行业可持续发展。解放军302 医院引进国外自动化配液机器人配置注射用药品[4];上海交通大学研制的螺旋下药中药计量装置,理论上能实现下药定量精准化,但是如果储药装置中进入空气,则容易造成颗粒药品的潮解,影响物料的流动性[5];三九医药[6]推出了一种半自动配药系统,将每味中药以小质量单位封装,放于分层药柜,取药时根据医生处方撕取每味药n袋,缺陷是成本高、不环保并且处方应为封装的整数倍,患者服药困难;四川大学研制的中药颗粒自动配药柜[7]利用体积称量法使得中药下药顺利;德国ROWA 公司设计的自动化药房中的机械手能根据发药指令将药品送达指定窗口[8]。
本文在SolidWorks 仿真软件环境下基于事件创新设计了一种中药袋卷储盘开盘输送系统,对系统的主要机构进行三维建模[9]与运动学模型设计。通过各个组成机构之间的运动配合,利用基于事件仿真分析的分类触发机制,模拟出中药袋卷储盘开盘与输送全过程,由仿真结果评估了系统的工作性能。该系统的研究弥补了目前中药市场智能配药系统中关键的药袋储盘开盘与输送功能的空缺,是智能中药配药系统的核心装备[10-11]。
1 系统整体结构组成与各部分机构设计
本文设计的中药袋卷储盘开盘输送机构分为中药袋卷储盘机构、旋转取袋机构与平皮带输送机构,整体结构如图1 所示。

图1 系统整体结构图Fig.1 Overall structure of the system
1.1 中药袋卷储盘机构设计
基于现有的中药连续袋卷实物(如图2 所示),建立了图3 所示的三维模型。药袋材料为PE 低密度结膜,单个药袋规格为90 mm×60 mm,药袋鼓包处高为20 mm。药袋符合医用高分子产品包装与制造,断裂强力性能符合FZ/T 64005-2021《卫生用薄型非织造布 》合格品的规范要求。药袋均匀缠绕在储盘上,且缠绕结束位置用如图4 所示的销钉夹紧装置压紧。夹紧装置与储盘固结,夹紧环通过平键与销钉连接,销钉置于储盘内部,待需开盘时拧开夹紧装置取出销钉,进行后续开盘输送动作。

图2 中药连续袋卷Fig.2 Traditional Chinese medicine bag roll

图3 中药袋卷三维模型图Fig.3 3D model of traditional Chinese medicine bag roll

图4 手动压紧装置爆炸图Fig.4 Exploded view of manual pressing device
1.2 旋转取袋机构设计
中药袋卷缠绕于储盘上,药袋尾端与下层药袋之间的3 种位置关系如图5 所示。根据药袋形状、尺寸和材质,若用传统机械手加持容易造成药袋变形、加持脱落,以致不能正确送到平皮带输送机,所以创新采用专门用于吸附小包装药品类外包装丁腈橡胶材质的带肋平型真空吸盘[12],尺寸如图6所示,使易变形的中药药袋能可靠地开盘与脱离,并顺利进入平皮带输送机。根据需求设计的机架与分气盘固接、主动轴与转盘固接,转臂前部装有真空吸盘,后部装有平衡配重的滚子部件,转臂与转盘铰接,取袋机构结构如图7 所示。

图5 接触药袋贴合形态Fig.5 Contact medicine bag fitting form

图6 吸盘尺寸图Fig.6 Suction cup size chart

图7 旋转取袋机构结构图Fig.7 Structural diagram of rotary bag pick-up mechanism
1.3 平皮带输送机构设计
本文研究的中药药袋形状特殊、质量轻、药袋与平皮带之间的摩擦系数小,药袋传送到一般平皮带上易打滑,故创造性地加装了由电机驱动的辊轮压紧药袋。平皮带输送机构如图8 所示,整机长、宽、高分别为970、306、306 mm;辊轮与皮带高度间隙16 mm;移动速度150 mm/s。

图8 平皮带输送机构结构图Fig.8 Flat belt conveyor structure diagram
2 个电机的选型计算:根据负载扭矩与惯性力矩选择电机,根据工件的移动时间选择齿轮比。条件值:电机转速=1 300 r/min,同步带轮比为2∶1;电机转速≈60×齿轮比×带轮比,齿轮比≈10.8,齿轮头的齿轮比选1∶10。
(1)计算负载扭矩Tm
式中:m=2.0 kg;g=9.80 m/s²;η=0.81;r=0.075 m;Sf——安全系数,取值Sf=2。
(2)计算负载惯性力矩
皮带轮承受的惯性力矩:
式中:J1、J2——大、小皮带轮承受的惯性力矩,J1=1.816 2×10-2kg·m²,J2=1.331 2×10-5kg·m²;b/a——齿轮比。
马达轴的惯性力矩:
马达尾部容许惯性力矩为0.735 kg·m2,马达端盖容许扭矩2.25 N·m,0.735 kg·m2>0.455 kg·m2、2.25 N·m >1.816 N·m,说明符合规范要求。
2 整机工作机理
把储盘、取袋、运输等机构功能模块[13-14]组合,药袋流转流程示意图如图9 所,机构的整体运行机理为:(1)将轴上的中药储盘手动压紧装置的销钉拔出,让中药袋卷尾端伸出,高于此层药袋位置;(2)旋转取袋机构转盘在主动轴带动下逆时针开始转动,当接近传感器[15]sensor 1 探测到旋转取袋机构执行端真空吸盘,主动轴停止转动,吸盘在药袋尾部位置;此时分气盘真空腔通真空,通过测量传感器测量到吸盘与药袋距离为0 时,主动轴继续逆时针转动;(3)主动轴逆时针转动一定角度,接近传感器sensor 2 探测到真空吸盘,并触发提醒,此时真空吸盘正好与传送皮带平行,测量传感器测得皮带前端与药袋尾部部距离刚好为0 时,即贴合尾部时,主动轴停止转动;此时皮带输送机构的辊轮部分和皮带部分分别在电机轴和电机主轴传动的惰轮带动下开始运动,在辊轮的压力作用下顺利将药袋输送到皮带输送机上,输送至下一环节。

图9 药袋流转流程示意图Fig.9 Schematic diagram of the flow of medicine bags
3 机构基于事件的仿真分析
基于事件的仿真是通过添加关键元件定义接触与元件属性,而后创建一系列由传感器按顺序进行的任务,通过一个触发事件和相关联的任务操作定义每一项任务操作,进而控制中药袋从袋卷储盘经旋转取袋机构最终到皮带运输机这个开盘输送过程。具体内容包括:
(1)利用SolidWorks Motion 运动仿真插件生成一个运动算例;
(2)添加引力。加载一个标准重力,在计算时考虑各机构的质量;
(3)添加电机。添加的旋转伺服电机用于驱动旋转取袋机构主动轴,使其完成铰链转臂的转盘逆时针圆周运动;运动类型为等速运动。为使转运过程安全平稳,到达药袋位置前电机转速为10 r/min,吸附药品送到平皮带输送机构时转速为5 r/min,转运完成返回初始位置时转速为10 r/min;
(4)添加传感器。接近传感器(上文所述sensor 1、sensor 2)如图10 所示,当药袋进入检测距离,经时间延缓测量距离为0 时,任务被传感器触发,进而控制机构的一系列运动;

图10 传感器及检测距离Fig.10 Sensors and detection distance
(5)定义接触。接触是发生在2 个或多个实体间或者2 条曲线间的相互作用关系,在基于事件的仿真中必不可少。图11 为定义中药袋卷与储盘、袋卷各小袋以及中药袋卷与旋转取袋机构上的真空吸盘之间的接触以及被转运的药袋与平皮带输送机构中平皮带和压力辊轮之间的实体接触。为简化接触方案[16-17],定义接触组忽略相同项目间的接触;

图11 接触的定义Fig.11 Definition of contact
(6)创建任务。仿真中的任务表格、时间序列与逻辑关系设计如图12 所示。
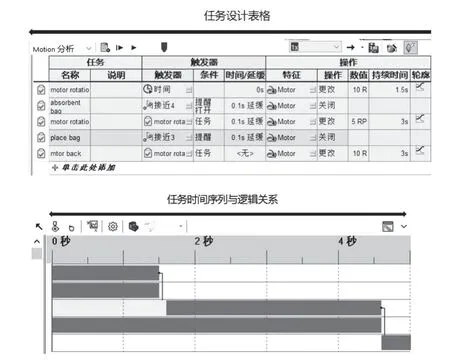
图12 基于事件的运动视图Fig.12 Event-based motion view
基于事件的仿真分析结果如图13 所示,时间线视图完整,仿真过程无报错,机构按照任务设计运行,说明机构设计合理,工作性能良好,能达到预期设计的运动性能。

图13 基于事件的时间线视图Fig.13 Event-based timeline view
4 结语
(1)对设计的中药袋卷储盘开盘输送系统各机构进行合理性分析,对关键零部件进行了选型计算。在运动仿真过程中,各机构按正确运动轨迹合理运动,表明设计比较可靠;
(2)通过基于事件的运动仿真分析,完整且可靠地模拟了中药袋的开盘输送过程。仿真显示出机构各时间点的运动过程以及各构件间的运动配合。仿真结果表明实验达到了预期目的;
(3)仿真中得到的事件时间帧序列可用来修改每个机构各部分系统的运动学参数,为后续系统升级优化提供数据支持。
