基于无迹卡尔曼滤波的电梯运行位置跟踪分析
2023-10-28韩晨升
韩晨升





摘要:实时监测电梯位置有利于及时定位故障电梯导轨、检测平层故障,可基于无迹卡尔曼滤波(unscentedKalman filter,UKF)设计一种电梯运行位置估计方法。该方法采用同步定位与地图创建(simultaneouslocalization and mapping,SLAM)算法初始化电梯楼层信息,依据高灵敏传感器的量测值与无迹卡尔曼滤波融合加速度传感器估计电梯实时位置。研究结果表明:测量积累误差因UKF 算法矫正不及时而持续增大,因此有效控制累积误差能够显著提高长时状态估计性能。误差积累可通过结合SLAM 的UKF 算法与自动校准得到有效控制,正确率高达95.02%,大幅提高了电梯运行位置估計效率,有助于提升电梯运行控制精度,为后续的智能化奠定数据基础。
关键词:电梯运行;位置跟踪;无迹卡尔曼滤波;加速度传感器
中图分类号:TP12 文献标识码:A
0 引言
电梯系统综合控制性能在未合理维护钢丝绳、导轨、传动结构及电机等设备或设备运行状态产生异常的情况下均会受到影响而降低,造成电梯轿厢振动程度更大[1-2]。
电梯轿厢存在以下两种异常振动信号:①导轨与导靴运动异常[3]。电梯系统固定结构由导轨与电梯轿厢利用导靴构成,在各个时刻导轨与导靴间隙易受导靴松紧程度及磨损状况的影响,从而造成偏差较大,导致异常特征在电梯轿厢振动状态下产生[4]。②钢丝因曳引绳产生滑差而锈蚀。钢丝绳受力异常出现滑差,导致电梯振动状况发生异常。如果振动信号不能被及时观察到,尤其是电梯所处的位置没有得到有效的定位,则不能及时应对突发情况[5]。
实时监测电梯位置,有利于及时营救被困人员、定位故障电梯导轨、检测平层故障等[6],本文提出了一种估测电梯运行位置的方法。初始化电梯楼层信息时采用同步定位与地图创建(simultaneous localization and mapping,SLAM)算法,应用加速度传感器,估计电梯实时位置主要由高灵敏传感器的量测值与无迹卡尔曼滤波(unscented Kalman filter,UFK)融合加速度传感器完成,并开展算例分析。
1 电梯运行位置估计
计算电梯位移量时应使用精度高的加速度传感器,短时间内可降低误差积累,初始化楼层信息需要对电梯运动特征进行检测。随时间积累,位移估计的误差减少,误差累积可通过及时更新初始海拔及结合电梯运动特征得到有效控制,电梯系统运行原理如图1 所示[7]。因此,电梯运行位置估计精度的提高,可结合运行楼层信息同时融合UKF 实现。
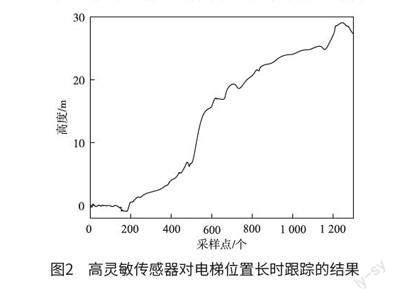
为处理电梯位移估计经加速度传感器所产生的误差积累问题,电梯位移估计应结合高灵敏传感器。利用高灵敏传感器并采用卡尔曼滤波(Kalmanfilter,KF)长时跟踪电梯位置的结果如图2 所示。
通过观察得出,与加速度传感器相比,在估计位移误差累积时应用高灵敏传感器可使误差积累速度持续减慢。由于具备短时精度高及采样率高的特征,加速度传感器对位移的估计误差因为两次积分累积误差的产生而持续累积,长期误差无限增大,但短期精度较高[8]。在位移估计误差累积速度方面,高灵敏传感器较慢,但精度较低。为提高轿厢运动状态估计精度,可结合电梯运动特征并融合二者优势。
2 电梯位置跟踪方案
2.1 无迹卡尔曼滤波
KF 在系统状态协方差和均值矩阵估计的应用主要利用时间和量测更新实现,UKF 结构原理如图3 所示。协方差和均值在系统呈线性时可获取最优估计。线性系统严格来讲在真实环境中是不存在的,尽管近似更新可通过应用扩展卡尔曼滤波(extended Kalman filter,EKF)来实现,然而通过泰勒展开EKF 处理非线性系统时采用线性化,雅可比矩阵计算必不可少[9]。当系统解析式未给出时雅可比矩阵计算难度极大,截断误差在泰勒展开高阶项过多的情况下增大,因此估计结果准确度在系统非线性化程度较高时将受到严重影响。
2.2 电梯位置跟踪流程
估计电梯位置时需要采用UKF 法。逼近非线性分布需要进行非线性变化,通过确定性采样实现,状态更新在无迹变换后完成,框架计算采用KF 实现[10]。
系统输入输出均为一维向量,并具有相同含义,UKF 计算公式为简化后应用。电梯位置跟踪流程如下。
(1)首先获取预测协方差和状态预测值,应用无迹变换(unscented transformation,UT)加权及对称采样策略。
(2)系统具有相同的输入输出,因此UT 变换无须开展,新息和卡尔曼增益计算需依据测量噪声协方差及测量值,均在测量信息获取后完成,再完成更新协方差与状态估计。
(3)以过程噪声为基础选取自适应方法。
(4)最后对电梯运动状态进行判断。
采用SLAM 算法对电梯楼层信息进行初始化,然后应用加速度传感器估计电梯实时位置,并依据高灵敏传感器的量测值与UKF 融合加速度传感器完成电梯位置跟踪。
3 实验与结果分析
电梯数据采集装置主要通过高灵敏传感器与加速度传感器搭建完成构建。初始化楼层信息后的运行结果如表1 所示,实际楼层在相邻楼梯间的间距为表中最后一列数据。楼层间距平均误差为0.03 m,最大误差为0.06 m。通过分析得出,各楼层位置初始化信息可利用楼层信息初始化方法进行有效精准获取,同时安装场所及电梯品牌在整个过程均表现出无关性。
电梯运行位置误差累积概率分布如图4 所示。其中,实线为仅应用UKF 时获取的结果,虚线为自动矫正机制加入传感器后获取的结果,点线为应用SLAM 算法与UKF 传感器自动矫正获取的结果。测量所积累的误差因UKF 算法矫正不及时而持续增大,相比于真实状态,UKF 算法的状态随着运行时间持续增长而不断偏离。将传感器自动矫正应用于UKF 算法中后,可有效控制累积误差,进而显著提高了长时状态估计性能。优化状态转移函数时结合SLAM 算法,矫正电梯的运行位置,使UKF状态估计误差进一步减小。
通过观察对比得出,误差积累可通过结合SLAM 的UKF 算法与自动校准得到有效控制。依据误差累积概率分布图,并参考表2 数据,计算得出电梯位置估计均方根误差与平均误差分别为0.112 m、0.114 m,滤波精度更高,收敛速度更快,平层故障更易监测。位置误差累积问题基本可通过本文设计方法解决,提高了电梯运行位置的估计效率。
4 结论
本文开展基于UKF 的电梯运行位置跟踪分析,取得如下有益结果。
(1)测量所积累的误差因UKF 算法矫正不及时而持续增大,UKF 算法随着运行时间持续增长而不断偏离。将传感器自动矫正应用于UKF 算法,能够有效控制累积误差,显著提高长时状态估计性能。
(2)误差积累可通过结合SLAM 的UKF 算法与自动校准得到有效控制,滤波精度更高,收敛速度更快,能够有效提高电梯运行位置估计效率。
该研究能够提高电梯效率,但在重载下存在计算冗长的问题,期待后续引入智能算法对其进行强化。
参考文献
[1] 李泽华,柴铮,赵春晖. 基于多通道卷积的电梯异常振动故障诊断[J]. 控制工程,2023,30(3):427-433.
[2] 陈志平,汪赞,张国安,等. 基于大数据的电梯故障诊断与预测研究[J]. 机电工程,2019,36(1):90-94.
[3] 吉训生,王大智. 正负类双超球体模型在电梯故障诊断的应用[J]. 信息与控制,2020,49(3):377-384.
[4] 谢小娟,杨宁祥,陈建勋,等. 基于图像处理的电梯曳引轮轮槽磨损识别方法[J]. 中国安全科学学报,2019,29(11):122-128.
[5] 赵海文,吴云龙,贺鹏,等. 电梯曳引机制动器故障检测方法研究[J]. 机床与液压,2018,46(1):185-188.
[6] 郑祥盘,伏喜斌,唐晓腾. 基于电能质量分析仪的电梯运行故障监测方法研究[J]. 电子测试,2018(15):95-96.
[7] 王溪波,葛宏帅,王瑞全,等. 電梯远程监控系统中高并发通信服务器的设计[J]. 计算机科学,2017,44(4):157-160.
[8] 吉训生,王大智,李晓. 面向不等长时间序列的电梯故障早期预测[J]. 小型微型计算机系统,2020,41(4):763-768.
[9] 郝真鸣,葛卫华,郝晋渊,等. 嵌入式电梯运行状态监测系统研究[J]. 电子测量与仪器学报,2019,33(8):187-193.
[10] 杜启亮,黄理广,田联房,等. 基于视频监控的手扶电梯乘客异常行为识别[J]. 华南理工大学学报(自然科学版),2020,48(8):10-21.
