微手系统的鲁棒无源跟踪控制
2023-10-26李小永张玉义
步 妮,李小永,张玉义
(青岛科技大学自动化与电子工程学院,山东青岛 266061)
1 Introduction
Micro-hand is a kind of soft actuators,which is mostly driven by pneumatic,which can also be driven by fluid,electrically active polymer materials and so on[1–2].The actuator is mostly made of rubber material,which has the characteristics of low cost,flexible movement,high efficiency and simple operation.It can be used in medical surgery,emergency rescue,geological exploration and other fields[3–5].There are many excellent research achievements on rigid actuators,but soft actuators are quite different from traditional rigid actuators in design and manufacture,drive and sensing,structure and material technology.Therefore,it is necessary to conduct separate and in-depth researches on soft actuators[6–8].
For the controlled systems with nonlinear characteristics,there are always various uncertainties in real systems,such as unmodeled dynamic characteristics,errors between measurement parameters and real values,and external disturbances which will have a certain impact on the modeling of the system,and may lead to system instability.Hence,due to the particularity of rubber materials and the multiple degrees of freedom of micro-hand,adopting appropriate research methods to study micro-hand is crucial.For micro-hand systems,most of the motion processes are nonlinear and usually present complex internal mechanisms and nonlinear characteristics,which leads to some inner variables of micro-hand cannot be defined and measured.As a result,it is difficult to relate with the physical meaning and real phenomenon of micro-hand using the traditional state space method.Meanwhile the operator-based robust right coprime factorization(RRCF)method is attracting more and more attention because i)only inputoutput model is used and measurements of the states in the real system are avoided;ii)the extended Banach space is more suitable for the system control theory and engineering;iii) robust stability of the nonlinear system can be guaranteed by a Bezout identity and a norm inequality.Therefore,owing to the structure and the material of the micro-hand system,the operator-based RRCF method is preferred[9–10].
The systems with right coprime factorization can be stable and robust by satisfying the Bezout identity.Although the robust issue is discussed,however,the condition is so limited that it cannot be applied widely in[9].Further,some robust conditions for the plant with right coprime factorization under unknown but bounded interferences are derived.The RRCF is extended to the robust control design of more general nonlinear feedback systems by proposing an inequality condition based on the definition of Lipschitz norm [11–12],by which the output tracking and fault detection issues are discussed.
Moreover,the isomorphism idea is introduced to explore the feasibility conditions of RRCF of the systems,and the design problems of nonlinear systems is studied [13–15].Through researches,it is found that it is difficult to get the inverse of the right factor because of the nonlinear part.Thus,the robust schemes are designed to ensure the robustness of nonlinear systems with uncertain as well as asymptotic tracking of input and output problems [16–17].The RRCF combined with the passivity property is discussed[18–19],wherein the robust condition and the storage function is respectively discussed by which the robustness and the passivity are both ensured.
In this paper,robust tracking control for uncertain micro-hand systems is studied.The contributions are summarized as follows:
i)The dynamic model of micro-hand system is established by using the operator-based RRCF method.
ii)A passive robust controller is designed to ensure the robustness and passivity of the system.
iii)The robust control scheme of dual Bezout is proposed,by which not only the robustness and passivity for the micro-hand systems but also the perfect tracking performance can be achieved.
The following is the framework of this paper: In Section 2,the preliminary mathematical knowledge,including right coprime factorization and passivity,and the modeling of the micro-hand model are given.In Section 3,the passive control and robust control of nonlinear system are studied,and the control schemes based on dual Bezout identity by using RRCF is proposed to realize more precise tracking control of in-out.In Section 4,the effectiveness of the proposed method is verified by simulation.Section 5 describes the conclusion and future work.
2 Micro-hand and RRCF
The structure and mathematical model of microhand and some definitions of RRCF [9]will be introduced in this part.
2.1 Micro-hand
The structure of micro-hand is shown in Fig.1,where the actuator is circular arc shape.Due to the supplying air pressure,the studied micro-hand actuator is bent.According to Fig.2,simplified diagram of the actuator is obtained,where the pressurep(Pa)is the input and the bending angleθ(rad)is the output.The parameters of the model are shown in Table 1.
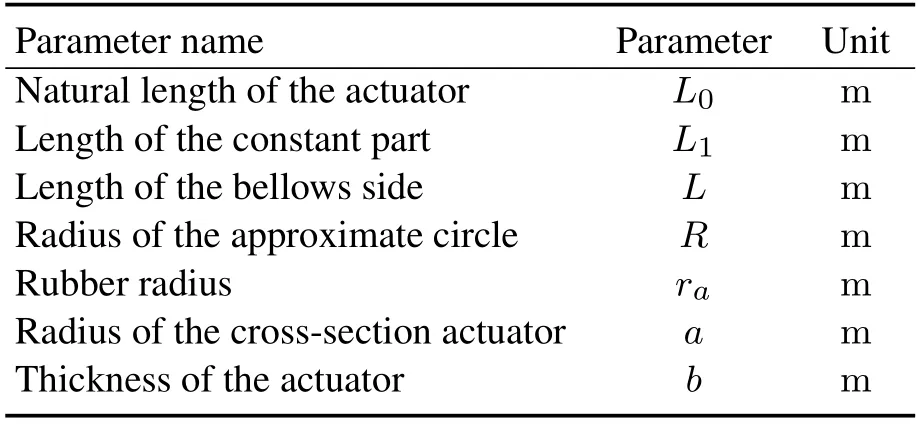
Table 1 Parameters

Fig.1 Micro-hand

Fig.2 Analysis model of the actuator
In Fig.3,the cross section of micro-hand is obtained,wherea(m)is the inside radius.Further,b(m)is the symbol of the maximum thickness.The center of the flat side is defined as the origin of polar coordinate system.The radius vector isr(m) and the argument isϕ(rad).ra(m) is rubber radius,which was shown as a fixed valuera=a+b/2 in previous studies.In fact,rais variable during inflation and expansion of the micro-hand actuator.It is imprecise to regardraas a fixed value.For the sake of rigor,the value ofrawill be identified using the RLS method in the simulation part.It is worth mentioning thatais supposed to be changeless and the changes in tube shape and size are considered as the uncertain part of the system.

Fig.3 Cross section of the actuator
The forcef1generated by pneumatic pressure in a small area of the end section of the actuator is shown as:
The moment of the force generated by pneumatic pressureM1is shown as:
Then,the opposite direction forcef2generated by spring in a small area of the bellows side:
whererais the rubber radius,andE(Pa) is the Young’s modulus.Assuming that the modulus of elasticity varies with the elongation of the rubber,thenEis defined as:,whereE0(Pa)is the initial Young’s modulus.
The moment of the force generated by spring forceM2:
From the balance between the moment generated by pneumatic pressure and the one generated by spring force in the end section of the actuator
Then,the nonlinear system model can be obtained from(2)(4)–(5)
where theuandyare used to represent the inputpand the outputθ,γis the time-varying parameter of the model.
2.2 Robust right coprime factorization
Definition 1Suppose one operatorFcan be factorized intoNandD-1.Then if the two operatorsAandBexist whileBhas an inverse form,which are both stable and satisfy:
whereA:Y →UandB:U →U,which is called to be the Bezout identity,for a unimodular operatorM:W →U,M ∈§(W,U),thenNandD-1is the right coprime factorization ofF.
Assuming that the above system are well-posed and internal stability system and satisfies the bounded input and bounded output(BIBO)stability.Some definitions of these nouns have been defined in [9].Based on the above analysis,a nonlinear system with disturbances is obtained,which shows in Fig.4.In detail,the actual plant has the modeling error and the disturbance,which are regarded as the uncertainties.Then,the RRCF of the actual plantis described asF+∆F=(N+∆N)D-1,where ∆Nis regarded as the uncertain operator that is unknown,but it is limited.

Fig.4 The uncertain feedback nonlinear system
Definition 2Suppose a nonlinear operatorF:De →Ye(De ⊂Ue)is the generalized Lipschitz operator onDe,if there exists a constant numberε
where∀x,∈De,especially,Lip(De):De →De.εis regarded as Lipschitz norm ofFand can be obtained by the following formula:
Lemma 1LetDe ⊂Ue,if the following conditions are all true:
3 Micro-hand system design
In this part,the RRCF method is used to ensure the robust stability of the micro-hand system.Meanwhile,the passivity of the system with uncertain is ensured by designing robust controllers;further,the robust tracking control based on dual Bezout identity is applied to deal with the precise tracking for micro-hand with uncertainties.
3.1 System design of micro-hand model
The nonlinear plantF+∆Fis defined as
whereζis the parameter of the uncertain plant applying the nonlinear feedback system,F+∆Fcan be factorized into the following two parts:
The compensatorH-1shown in Fig.5 is designed as
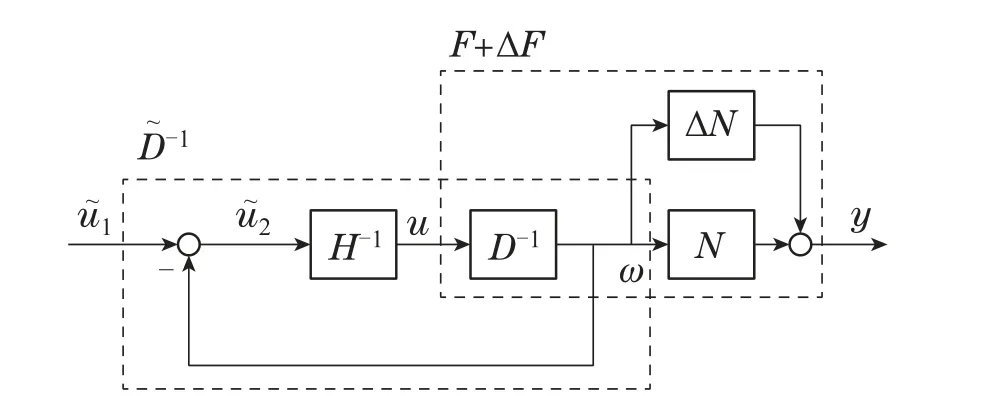
Fig.5 The nonlinear system with the compensator H-1
According to Fig.6,the controllersAandBcan be designed as
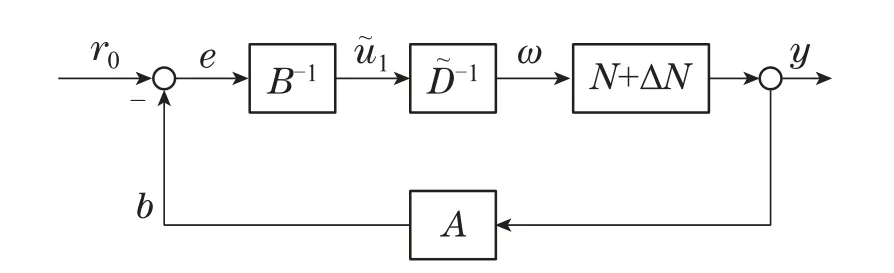
Fig.6 The passive feedback system
whereKis the parameter which is designed to satisfy(12).Then,is obtained as
3.2 Passivity-based nonlinear system
In this part,the passivity of the micro-hand system is guaranteed by designing the robust passive controllers using the passivity-based control.
The nonlinear plantF+∆Fcan be factorized into(N+∆N)andD-1.To design the passive system,the passivity-based robust control with compensatorH-1is designed by using isomorphism idea as shown in Fig.5,and the compensator can be described as
among them,Iis regarded as the identity operator.The isomorphic passive nonlinear system design with uncertainty(N+∆N)is shown in Fig.6,while it can also be equivalent to Fig.7,where=A(N+∆N)+B.

Fig.7 The equivalent system of Fig.6
The storage functionV(ω)is designed as that
According to (25),the micro-hand system is passive.It is of great physical significance to study the system from the perspective of energy,the nonlinear control feedback system is controlled to be stable and passive with the designed controllers by using RRCF.
3.3 Tracking control based on dual Bezout
After designing robust stability and passivity,tracking performance is considered.However,in the real applications,the uncertainties will damage the stability and various performances of micro-hand system.Hence,in order to improve the tracking performance,a robust tracking control scheme based on dual Bezout is proposed.In detail,by designing the controllersSandQwhich can satisfy Bezout identity again,the tracking performance of the system can be realized.
In Fig.6,assume that the system is stabilized,where robust controllersAandBare designed to ensure the robust stability of the system.Based onA(N+∆N)+B=,the equivalent system in Fig.8 can be obtained,whereS-1and-1are reversible,in order to satisfy

Fig.8 Tracking control based on dual Bezout
whereα,βandηare the design parameters,according to(9)
Then,Fig.9 is obtained,which is equivalent to Fig.8.

Fig.9 The equivalent system of Fig.8
Through the above relationship,it is concluded that under the premise of robust stability of nonlinear feedback system,error signals are guaranteed that it get as close as possible to zero using the designed robust tracking controllersQandS.
4 Simulation
In this section,a simulation for micro-hand with uncertainties and external disturbances will be given to verify the effectiveness of the proposed scheme.
However,there is a problem with the validation process: the shape of the bellows will change when the input pressure increases.In more detail,since the rubber radiusrais changing during rubber inflation and expansion,it is very difficult to design the compensatorH-1.Hence,the identification ofrabased on RLS method is carried out[20].
It is clear from Table 2 and Fig.10 that the data has convergence.In detail,as the amount of data increases,the accuracy of parameter estimation will be higher.Finally,ra=1.0701×10-3(m)withσ2=0.052are chosen as the estimated radius when designing some controllers that includera.
According to (29)–(30),the related parameters are chosen to beζ=0.6,K=0.67 and the reference inputThe structural and adjustment parameters are shown in Table 3 and the simulation results are as follows.
Fig.11 shows the angular position tracking of flexible actuator.For the convenience of observation,the simulation running time is set to 100 s,and the error result is shown in Fig.12.According to Fig.12,it can be clearly seen that the tracking error is within acceptable limits,and it is close to zero within the range of±0.5.In order to verify the superiority of the tracking method based on dual Bezout,the angular position tracking by RRCF is shown in Fig.13.By contrast,the RRCF tracking method has a big error between the reference input and the output while the tracking method based on dual Bezout realizes perfect tracking performance.These simulation results illustrate that the robust tracking control scheme based on dual Bezout method realizes the accurate tracking of plant output.Further,the tracking error of micro-hand using this method can maintain high accuracy and also ensure the robustness of the micro-hand system.The passivity performance for micro-hand system shown in Fig.14.

Fig.13 The position tracking by RRCF
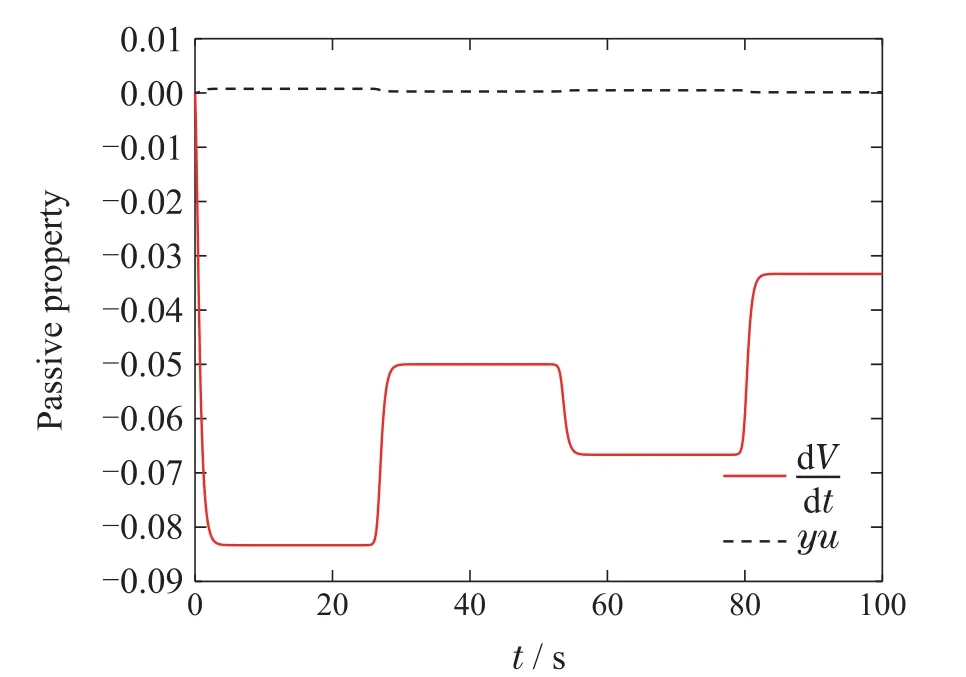
Fig.14 Passivity performance
5 Conclusion and future work
In this paper,using operator-based RRCF,the robustness and passivity of the micro-hand system are guaranteed by designing the improved robust controllers.Then,the tracking controller is designed in combination with the dual Bezout identity,which make the influence of the disturbance of the system as small as possible under the premise of ensuring the stability of the system,and makes the system have perfect tracking performance.
Due to the nature of rubber tube,there will be timedelay and hysteresis in the process of inflating,which will not be ignored in our future research work.