基于AHP 法和TOPSIS 法的导盲杖优选设计研究
2023-10-26金翎子郭怡然艾萍
金翎子 郭怡然 艾萍
(青岛理工大学艺术与设计学院,青岛 266000)
失明和视力障碍是经常出现的人类残疾,影响着世界各地的人们。根据世界卫生组织的数据,全球范围内有超过22 亿人存在视觉障碍的问题。中国盲人协会的统计数据显示,中国约有1 700 万盲人[1]。视障人士的衣食住行存在着诸多不便,且存在一定的安全隐患。目前我国对于导盲杖的研究较少,再加上视障人群有一定的特殊性,因此文章基于AHP法与专家问卷评分[2],并在对部分视障人士问卷调查的基础上,优先考虑产品的功能需求,将它作为产品设计与优化的依据,从而为视障人士的出行提供新的设计思路。
1 相关概念解析
1.1 AHP 法
美国运筹学家匹茨堡大学教授Saaty 所提出的AHP 法(层次分析法)能够将研究元素划分为多个层次,包括目标、准则和方案等,并对它们进行定量和定性分析,以实现对研究对象的全面评估[3]。至今,该技术在众多领域中得到了广泛地应用[4-7]。AHP 法可以客观科学的将复杂的要素进行分层解析,计算出各个层级、要素之间的权重数值[3],帮助设计者对产品设计要素进行优先级排序[8]。从而构建模糊判断矩阵,以权重结果为参考依据,便于设计者决策[9]。
1.2 TOPSIS 法
TOPSIS 法(逼近理想解排序法)是一种综合的评估方法,通过计算评价方案与正理想解、负理想解的距离进行排序,若评价方案离正理想解最近,离负理想解最远则为最优解,这种方法经常被用于建立评估模型,从而解决复杂的多元指数分析问题[10]。同时,通过TOPSIS 法构建初始化矩阵,对原始数据进行标准化处理,对现有的设计方案进行比较,找出方案中的最优解,计算出它与正理想解的相对贴近度,并对各个方案进行排序和评估,从而得出合理、有效的解决方案[11]。
2 导盲杖设计存在的问题
2.1 手杖类导盲杖存在的问题
目前,市场上涌现出众多专为盲人出行设计的辅助产品,其中广泛使用的为手杖类产品。手杖作为一种辅助装置,在视障人士出行时起到了重要的作用。视障人士可将手杖视为自身触觉的延伸,通过抓握手杖不断地敲击前方地面,以判断路面的高低起伏及是否存在障碍物阻挡,并及时调整行进状态,以达到导盲的目的。另外,一些带有警示功能的手杖还能起到一定的提示作用。尽管手杖的品类和式样千差万别,但它们的基本构造却高度相似,由杖体、杖柄和杖底三个部分构成。拐杖分为木制、不锈钢结构、塑料结构等几种类型。杖体的延展长度通常约为1 米,它的选择或定制主要基于盲人自身的身高。为了探究前方道路的畅通情况,一些手杖产品采用特殊材料制成的杖底进行敲打,这种杖底通常呈上细下厚的形状,方便盲人行走时使用敲打地面来探索。此类导盲杖应用较早,以敲打的方式判断前方路面是否畅通,但是在某种程度上会加大产品的磨损度[12]。
2.2 电子类导盲杖存在的问题
电子导盲杖的款式和普通盲杖基本相同,只是增加了电子信息技术等相关技术以帮助盲杖实现其他功能。在电子导盲杖设计方面,国外的设计师Rms A 通过超声波传感器、蜂鸣器和振动器的新连接来实现[13]。当导盲杖感应到障碍物时,蜂鸣器和振动马达被激活,用户会收到警报。警报分别以蜂鸣器和振动器的声音和振动的形式发出。俞国华等人在结构安全的同时,增加了环境探测功能[14]。宋玉娥等人针对视障人士出行,设计引导避障功能,提醒行人及车辆避让视障人士[15]。电子类导盲杖的外观设计别出心裁,具备出色的便携性,但功能相对单一,目前主要集中于障碍物探测方面,因此在实际出行中的应用场景相对较少。
3 基于AHP 法和TOPSIS 法的导盲杖优选设计思路
3.1 建立导盲杖产品设计层次分析模型
1)目标层。目标层只有一个要素,通过对视障人士导盲杖产品设计要素分析得到一个最优的解决方案。
2)准则层。对于导盲杖产品设计来说,安全性、延展性、舒适性、经济性、易用性5 个要素能够产生深刻的影响。其中安全性是重要的影响因素,视障人士的日常活动中本来就存在许多未知因素,长时间使用产品就需要加强安全性能。视障人士的就业总是存在一定的困难,在确保导盲杖安全性的同时也要降低产品的经济成本。
3)子准则层。根据层级构造方法,将经济性、舒适性、安全性、延展性、易用性5 个准则层分别细分为多个子准则层[16]。具体将可替换、可延展归为延展性方面;将造型选择、人机设置、材料选择归为舒适性方面;将结构耐磨不易折断、信息反馈准确、造型圆润、紧急情况处置归为安全性方面;将局部可更换、材料造价低、技术常态化归为经济性方面;将高度的容错性、简洁的操作方式,以及清晰的界面布局视为易用性方面。由此,基于层次分析法的原理构建出导盲杖设计的层次结构模型,如图1 所示。
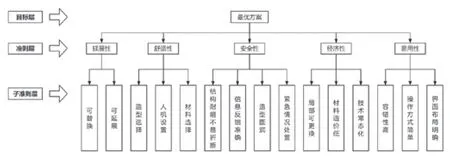
图1 导盲杖设计的层次结构模型
3.1.1 构建判断矩阵及确定各指标权重
通过比较准则层与子准则层的全部要素之间的相对重要性,合理构建出判断矩阵[7]。在此步骤中,通过确定相对比例尺度来提高精准度。导盲杖的设计判断矩阵构造方法,如表1 所示。
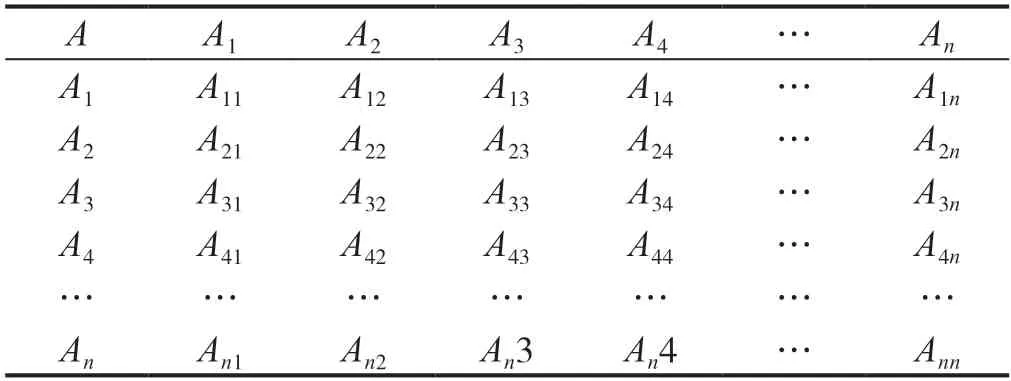
表1 判断矩阵构造方式

表2 判断矩阵标度含义
Aij所代表的准则层A1,A2,…,An对目标层A的重要性,以及Ai对Aj各个要素的相对重要性均以Aij表示,反之则以1/Aij表示。Aij元素的判断矩阵采用 1——9 的标度方法,标度如表 2 所示。
导盲杖设计的优化方案目标判断矩阵及权重,如表3 所示,A 代表了目标层,而A1、A2、A3、A4、A5五项指标分别代表了安全性、延展性、舒适性、经济性、易用性这5 个要素。在子准则层中,可替换为A11,可延展为A12,造型选择为A21,人机设置为A22,材料选择为A23,结构耐磨不易折断为A31,信息反馈准确为A32,造型圆润为A33,紧急情况处置为A34,局部可更换为A41,材料造价降低为A42,技术常态化为A43,容错性高为A51、操作方式简单为A52、界面布局明确为A53。选择20 名目标用户,其中5 名是产品设计师,5 名是研究产品设计相关领域的教师,5 名是视障人士,设计学方向硕士研究生5 名,使用评分方法来评估所有因素,延展性、舒适性、安全性、经济性和易用性准则的判断矩阵和权重,如表4~8 所示。

表3 最优方案目标判断矩阵及权重

表4 延展性准则判断矩阵及权重
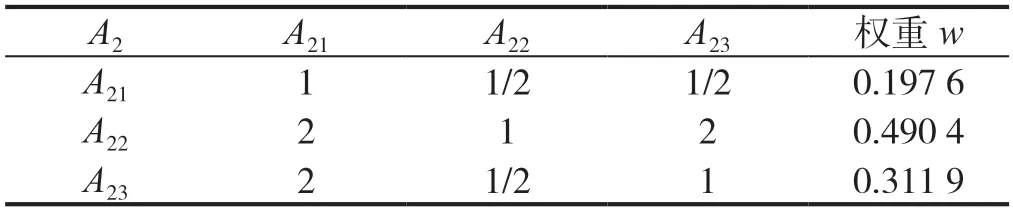
表5 舒适性准则判断矩阵及权重
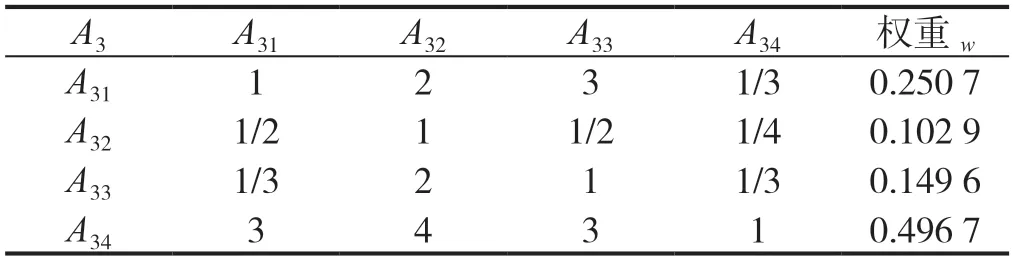
表6 安全性准则判断矩阵及权重
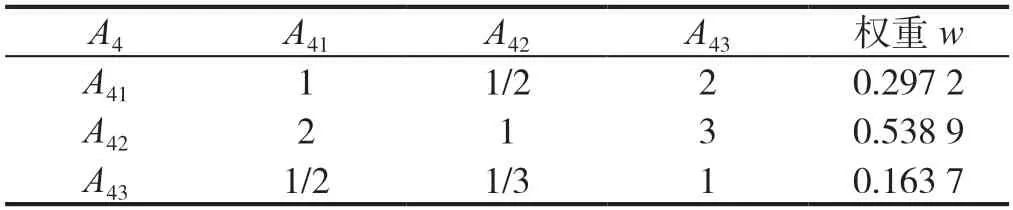
表7 经济性准则判断矩阵及权重
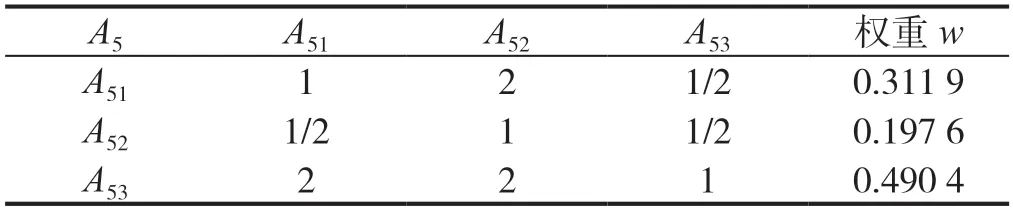
表8 易用性准则判断矩阵及权重
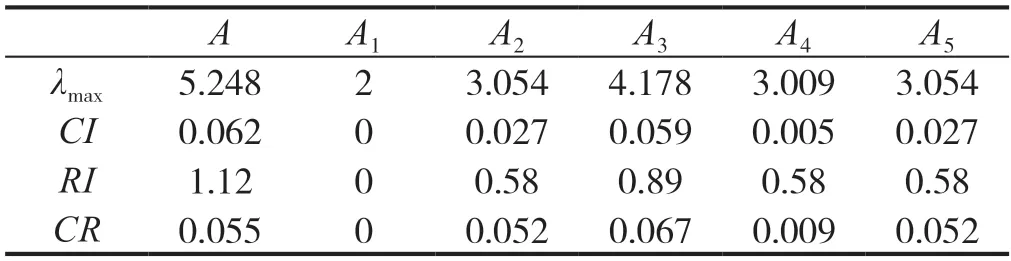
表9 一致性检验结果
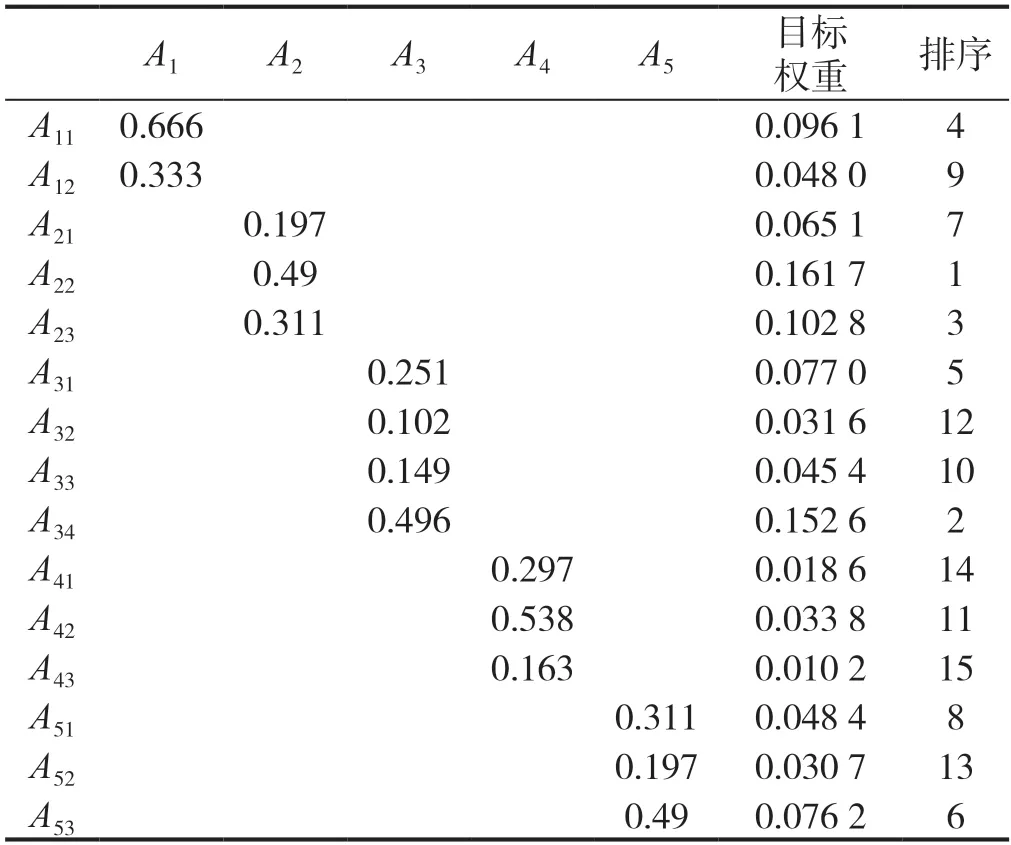
表10 目标权重排序
3.1.2 一致性检验
通过分析判断,数据通过一致性检验。在具体的计算过程中,使用CI表示判断矩阵的一致性指标,CR表示一致性比率,两者需要满足如下要求:
文章运用层次分析法分析了导盲杖设计各指标的权重值,得出对导盲杖设计影响较大的要素是人机设置。除此之外,紧急情况处置、材料选择、可替换、结构耐磨不易折断所占的权重值相对较高,是评价导盲杖好坏较为重要的因素。
3.2 基于TOPSIS 法的设计方案评价
研究通过AHP 法所得出各个元素的权重分析结果进行导盲杖设计,以此提高设计评估的科学性和效率。基于计算出的各个要素权重值的排序结果,运用TOPISIS 法对导盲杖的设计案例优先级进行了排序,并初步提出了3 个合理可行的导盲杖设计方案。
方案1,如图2 所示。对于视障人士来说,在行走过程中,可以通过敲击、触觉来对盲道与障碍物进行判断,但对一定高度的店铺招牌、栏杆等未知事物的认知能力及识别能力不足,不能够准确地理解并识别清楚,导致视障人士经常会撞到。设计一款具有红外线识别功能的导盲杖,红外线分布在产品上、中、下三个方向。通过手柄内设置的振动模式提醒视障人士。三个红外线形成的红外线网,在前行的方向上避免了视障人士的盲区,降低摔倒、撞击产生的可能性。

图2 导盲设计方案
方案2,如图2 所示。在需要转弯或前进后退的动作时,盲人无法以灵敏的动作告知路人自己前行的方向,使用传统导盲杖需要左右挥动导盲杖,并敲击地面以用于告诉路人自身的动作意图。在盲人前进、左转、右转的行动中,通过三个转向按钮发出的声音,告知其他盲人的行动路径及行动目的。
方案3,如图2 所示。视障人士并不能像正常人那样公平地获取信息资源,空间认知主要依赖于非视觉感知的综合感受。在日常生活中,视障人士往往通过触觉、听觉等感官获取各种环境信息,如声音大小、形状位置和方向,以及其他相关因素。通过激光感应技术,识别前方障碍并通过把手凸起盲文的变化来实时提示,对于前方突然出现的物体,利用把手的振动及时反馈信息。
3.3 基于TOPSIS 法的设计方案优选
1)以图 1 中的评价要素为参考确定评价指标,分别为正向的可替换、可延展、造型选择、人机设置、材料选择、结构耐磨不易折断、信息反馈准确、造型圆润、紧急情况处置、局部可更换、材料造价低、技术常态化、容错性高、操作方式简单、界面布局明确等 15 项正指标。
2)为保证评价结果的有效性,邀请5 位按摩店的视障人士、3 位产品设计方向教授与2 位产品设计师,对3 款设计方案Di(i=1,2,3)中的15 项指标Fj(j=1,2,…,15)打分,以 10 分为满分(0~3分表示极其不认可,3~5 分表示相对不认可,5~6分表示良好,6~8 分表示相对认可,8~10 分表示极其认可),建立初始评价矩阵,用A 表示,如表11所示。

表11 初始评价矩阵
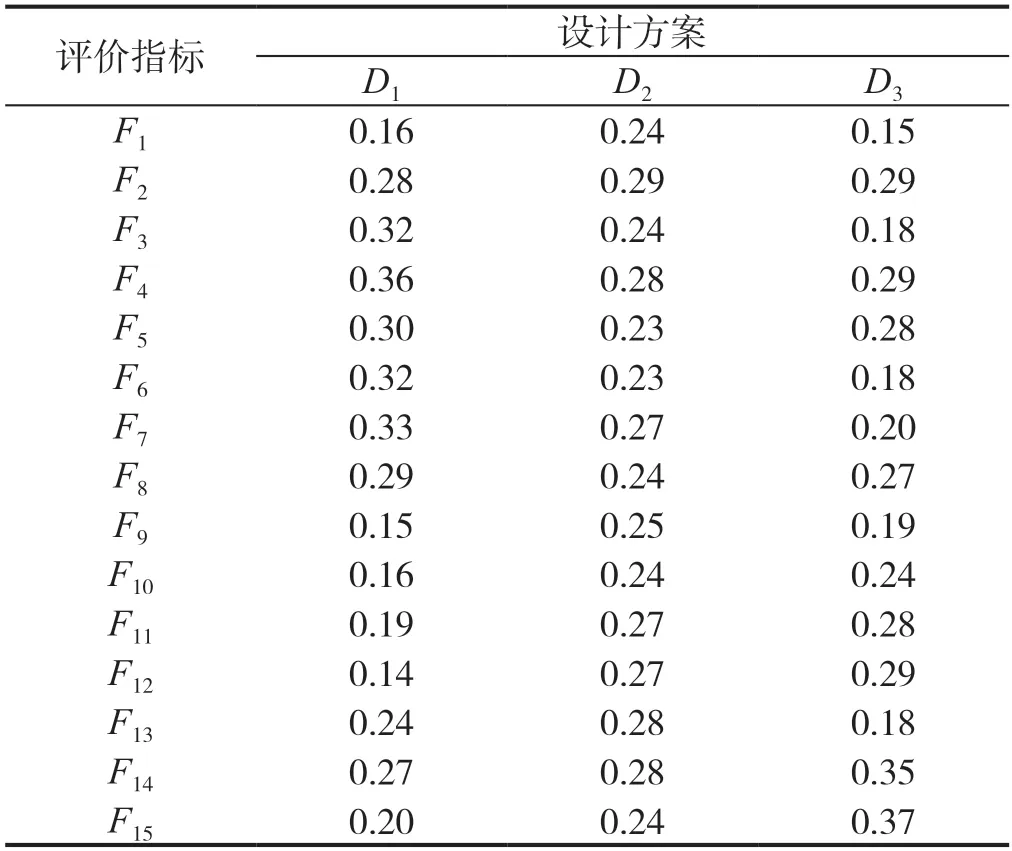
表12 标准化评价矩阵
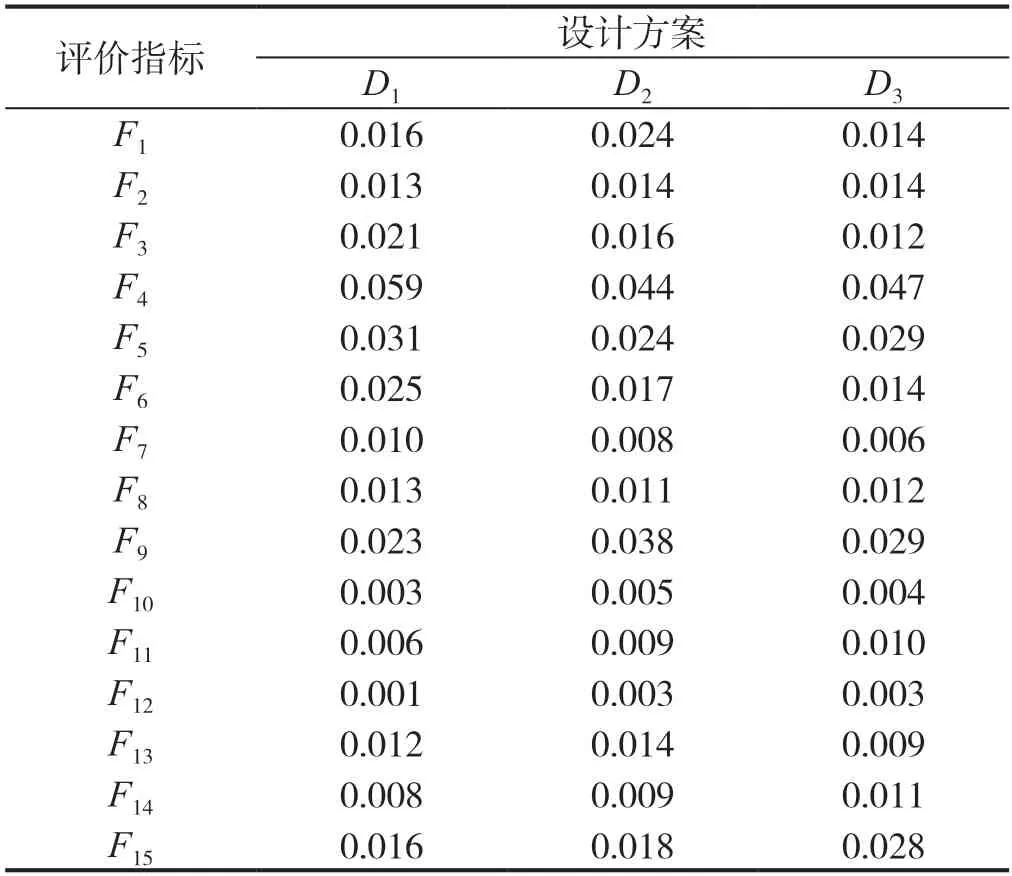
表13 加权标准化评价矩阵
在获得初始评价矩阵后,利用公式(3)将上述数据进行了标准化处理,以获得标准化矩阵Bij,如表 12 所示。
根据表 10 计算出的权重,通过公式(4)得到加权标准化评价矩阵Zij,如表 13 所示。
3)求正负理想解,令:
则正理想解如下:
负理想解如下:
由公式(5)-(8)可得出评价对象的正理想解为X+=(0.741,0.634,0.791,0.666,0.621,0.78,0.77,0.64,0.667,0.703,0.696,0.802,0.765,0.607,0.683),负理想解为X-=(0.37,0.53,0.379,0.455,0.492,0.363,0.406,0.502,0.398,0.452,0472,0.401,0.412,0.545,0.442)。
4)计算每个方案与理想解之间的距离,以及相对贴近度,各方案得到正理想解X+和负理想解X-的距离分别是:
每个方案到理想解的相对贴近度为:
根据所得到的Ci值进行排序,当Ci值较大,说明该方案更占优;Ci值越小,表明该方案更劣势,如表14 所示。
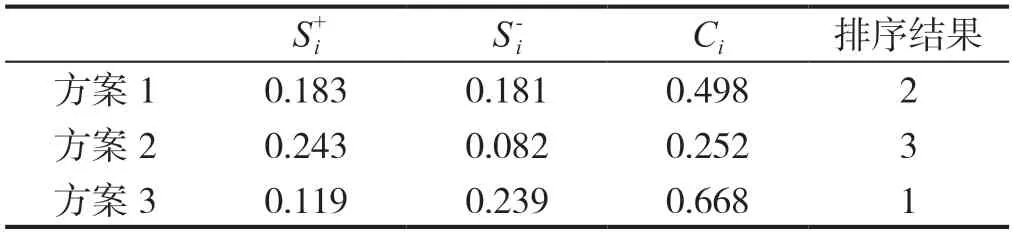
表14 欧氏距离及相对贴进度
由表 14 可知,方案 3 明显优于其他两款方案。
4 结语
文章提出了 AHP 法与 TOPSIS 法相结合的导盲杖设计方法,能够有效解决导盲杖设计中前端主观意向评估与后端设计方案不匹配的问题。研究首先以文献研究、专家问卷为调研基础,结合实地调研筛查,通过AHP 法建立了较为全面、科学客观的导盲杖设计评价指标体系,得出15 个子准则层的权重值并进行排序,以及对于视障人士来说4 个较为重要的功能需求。其次,基于层次分析法得出权重值,并对3 个方案进行了设计。最后,采用TOPSIS 法对3 个方案的权重进行排序。研究的创新之处主要体现在AHP 法和TOPSIS 法的融合,在一定程度减少了决策者对于设计方案的片面性与主观性。方案优选评价方法相对其他产品开发设计阶段具有一定的普适性。但是,在设计方案调研问卷中,会受到视障人士、产品设计研究生们等主观因素的影响,为了提高产品设计方案的优化度,后续可以采用如对导盲杖进行产品匹配度检验等方法,以便获得更加准确的结论。
