一种使用跟踪雷达观测水柱的声呐校准方法
2023-10-25李元
李 元
(中国船舶集团有限公司江苏自动化研究所,江苏 连云港 222006)
0 引言
为了勘探水底/海底地形、防御/打击水下目标,需要使用声呐作为传感器感知水底/海底地形,或潜艇、鱼雷、蛙人等水下目标。常见的声呐有舰壳/艇壳声呐、拖曳阵声呐、航空声呐、便携式声呐、海岸声呐等等。与舰炮武器系统配备的雷达或光电相比,声呐的探测精度严重不足。正常的,声呐探测精度的度量单位为度(°)[1-2],雷达或光电探测精度的度量单位为毫弧(mrad)[3],二者之间精度相差1~2个数量级。与使用雷达或光电的舰炮武器系统相比,受限于声呐探测精度较低,水下目标运动要素解算的精度一直难以提升,同时算法收敛时间较长,进而导致各型反潜武器系统和鱼雷防御武器系统的反应时间超长,且拦截/命中效果较差[4-5],作战能力偏弱。在某些特定情形下,甚至不得不采用面杀伤的方式来部分缓解声呐无法精确定位来袭目标的问题。可以说,声呐探测精度低已成为反潜武器和鱼雷防御武器性能提升的瓶颈,严重制约反潜武器和鱼雷防御武器的发展。
本文方法可以有效降低声呐的系统偏差,特别是指定海域水文因素带来的偏差,将声呐的系统误差精度由度级降低至毫弧量级,同时还可以获取当前海域的水中声速信息。
1 声呐探测误差
声呐探测精度低有多方面原因,如:有效感知水中声音需要较大尺寸的水听器阵列,声呐设备尺寸太大导致难以为其配置伺服;拖曳阵声呐是一个柔性而非刚性设备;不同时期不同水域/海域的不同盐度、温度、空泡分布带来水中声音传播速度变化及声道弯曲现象;安装声呐的舰船平台可能存在微小形变等等。其中,水文因素同时影响声呐探测的系统误差和随机误差,以系统误差还是随机误差出现,依赖于水文观测信息的准确程度和水文对声呐探测影响模型的准确性。但在确定时间确定海域,同一距离方位,两点间的水文特征对声呐探测的影响基本恒定,可以纳入系统偏差的范畴。
一般通过校准方式消除主要系统偏差。但传统的声呐校准方法,或专注于换能器灵敏度,或适用于试验室环境或水池环境[6-11],适用于装舰后真实海洋环境的系统偏差校准方法研究较少。刘千里[12]给出了一种利用本艇和目标GPS 数据进行真实海洋环境下的声呐校准方法。但该方法受目标装备成本和校准原理限制,耗时较长不适用于战前快速校准,且距离较近时受GPS 定位误差影响,校准精度较差。
2 利用炮弹入水声音/水柱的声呐标校方法
一般舰船都装备舰炮武器系统,该系统的跟踪雷达精度指标一般在毫弧量级,远高于声呐的精度指标。本文的方法利用舰炮武器系统向预定方向和距离发射炮弹,通过跟踪雷达观测炮弹入水时的水柱获取高精度的炮弹入水位置,同时声呐从水下获取炮弹入水声的方位信息,利用高精度跟踪雷达对声呐进行校准。方法流程为:根据作战需要确定需要校准的大致方向和距离,舰炮武器系统向该方位发射炮弹;雷达跟踪炮弹飞行直至入水,观测到水柱反射信号;记录观测到水柱信号时的舰艏方向、舰船姿态、位置等信息,同时获取舰船航行速度、方向等信息直至声呐听到炮弹入水声音;记录声呐听到炮弹入水声间时刻的舰艏方向、舰船姿态、位置等信息;根据记录数据计算得到本次声呐测量的角度偏差和水声平均速度;将角度偏差用于声呐探测校准,必要时多次测量取角度偏差平均值进一步提升校准精度。
2.1 不同时刻我舰位置变化
舰船在水面/海面上很难实现绝对静止。但无论舰船是相对静止还是自由航行,均不影响本文方法的实施。在炮弹发射、跟踪雷达探测到水柱、声呐探测到炮弹入水声音3 个时刻,舰船位置如图1 所示。本文方法需要获取跟踪雷达探测到水柱时与声呐探测到炮弹入水声音时,舰船位置的相对位置。具体可通过航程累积或卫导定位获取。特别地,炮弹入水至水柱溅起被跟踪雷达探测到之间有一个小的时间间隔,约0.23 s。本文中所述的跟踪雷达探测到水柱时刻实际上指的炮弹入水时刻。本文所指的跟踪雷达探测到的水柱距离、方位,也是修正该时间间隔期间我舰运动累积影响及舰体姿态差异后的入水点距离、方位。

图1 不同时刻舰船位置示意图Fig.1 Schematic diagram of ship position at different times
2.2 坐标转换
舰船在水中时刻处于摇摆状态,雷达和声呐探测目标时,均需要将探测信息进行坐标转换,才能得到地理坐标系下的绝对坐标。甲板坐标系与舰船地理坐标系之间的变换关系如图2 所示,变换矩阵为
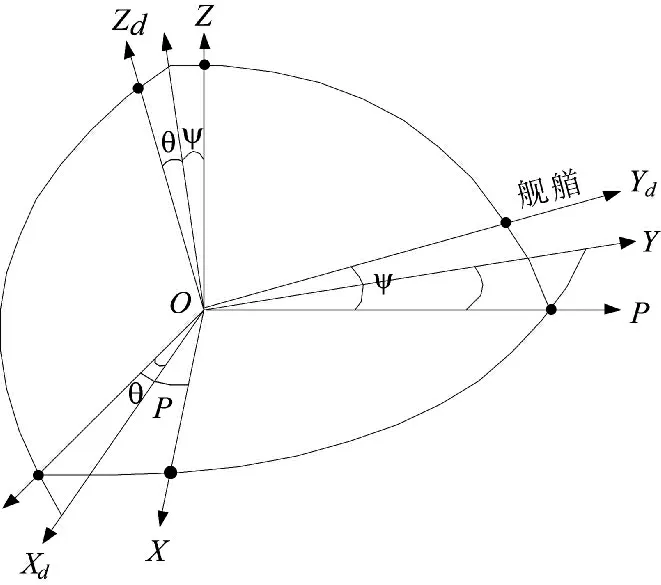
图2 舰艇地理坐标系OXYZ 变换至甲板坐标系OdXdYdZdFig.2 The coordination system OXYZ of ship is converted into deck coordinate system OdXdYdZd
传感器坐标系与甲板坐标系之间的坐标转换比较简单,坐标转换为传感器基线的坐标平移。
2.3 声呐校准角度偏差计算
使用本文方法,需要发射炮弹以产生水柱和入水声音。可以在勘探作战水域/海域时,将目标可能来袭方向或需实测水文环境对声音影响的方向作为发射炮弹方向,将目标发现距离或需要摸底海域水文区域大小作为入水点距离。该距离不能超过舰船上的舰炮射程,一般设定在1 km~25 km。
记跟踪雷达观测到水柱的时刻为t0,该时刻舰船的舰艏方向P0、纵摇角ψ0、模摇角θ0、水柱方位Q0、水柱距离D0。从t0时刻开始,记录舰船的运动轨迹,即,船体行进方向Cship(t)和行进速度Vship(t),直至声呐探测到炮弹入水声音时刻t1。记录t1时刻舰船的舰艏方向P1、纵摇角ψ1、模摇角θ1,以及声呐探测到的炮弹入水点方位角为Q1。其中,Q0、D0为跟踪雷达坐标系数据,Q1为声呐坐标系数据。
记在跟踪雷达和声呐在舰船上的基线分别为(xradar,yradar,hradar)、(xsadar,ysadar,hsadar)。
则到t1时刻炮弹入水点在声呐坐标系中的位置为
式中的航程累积部分也可由t0时刻、t1时刻卫导定位的舰船地理系位置(xship,0,yship,0,hship,0)、(xship,1,yship,1,hship,1)来代替。即
进而得到此次测量的角度偏差(校准角度):
3 传感器误差等对校准方法的影响
本文的校准方法,校准精度受跟踪雷达的距离、角度测量精度,惯导的航向、摇摆测量精度,卫星导航的定位精度,以及跟踪雷达、待校声呐的基线测量/安装精度的影响。记t0时刻,跟踪雷达的距离测量误差为ΔD0、跟踪角度误差为ΔQ0,惯导的航向误差为ΔP0、纵摇误差为Δψ0、横摇误差为Δθ0,卫星导航的定位误差(地理系)为(Δxship,0,Δyship,0,Δhship,0);t1时刻,惯导的航向误差为ΔP1、纵摇误差为Δψ1、横摇误差为Δθ1,卫星导航的定位误差(地理系)为(Δxship,1,Δyship,1,Δhship,1);以及跟踪雷达基线误差(甲板系)为(Δxradar,Δyradar,Δhradar)、待校声呐基线误差(甲板系)为(Δxsadar,Δysadar,Δhsadar)。则实际得到的声呐测量角度为
其中,
4 仿真分析
假设跟踪雷达距离精度指标(1σ,下同)为2 m,角度精度为1 mrad;卫导的定位精度为0.3 mrad;惯导的艏向精度为1 mrad,摇摆测姿精度为0.5mrad。计算t0时刻、t1时刻时间差时,海水声速取值1 500 m/s。舰船的纵横摇角在[-10°,10°]中随机选取。
4.1 一次测量与多次测量平均的校准效果比较
分别模拟舰船向约5 km、10 km 远发射炮弹,在此期间舰船以[0 kn,30 kn]的速度随机向四周以匀速直线方式行驶。对5 km、10 km 各模拟10 000 次。统计一次测量校准偏差,以及多次测量取平均后的校准偏差情况,结果包括图3、图4 所示。
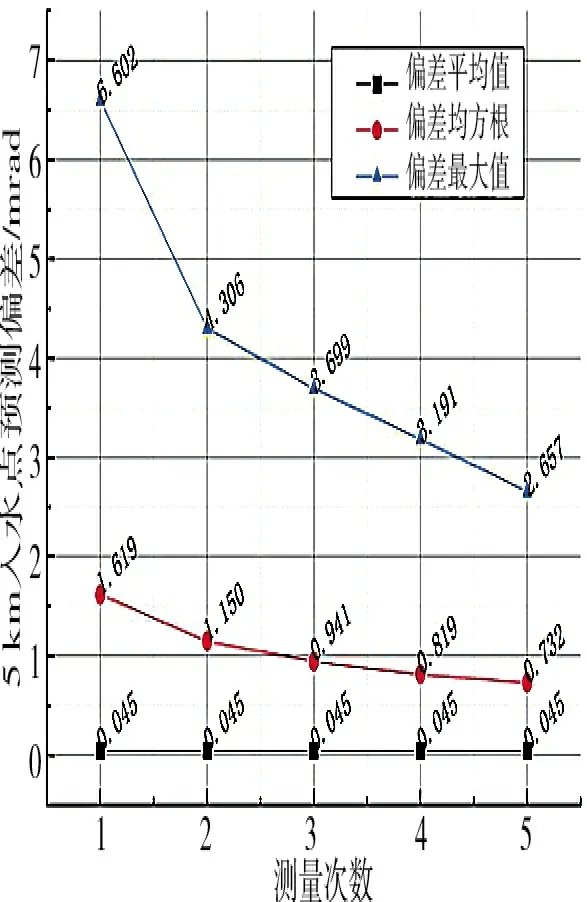
图3 入水点的校准偏差结果统计(5 km)Fig.3 Calibration deviation result statistics with entry point of(5 km)
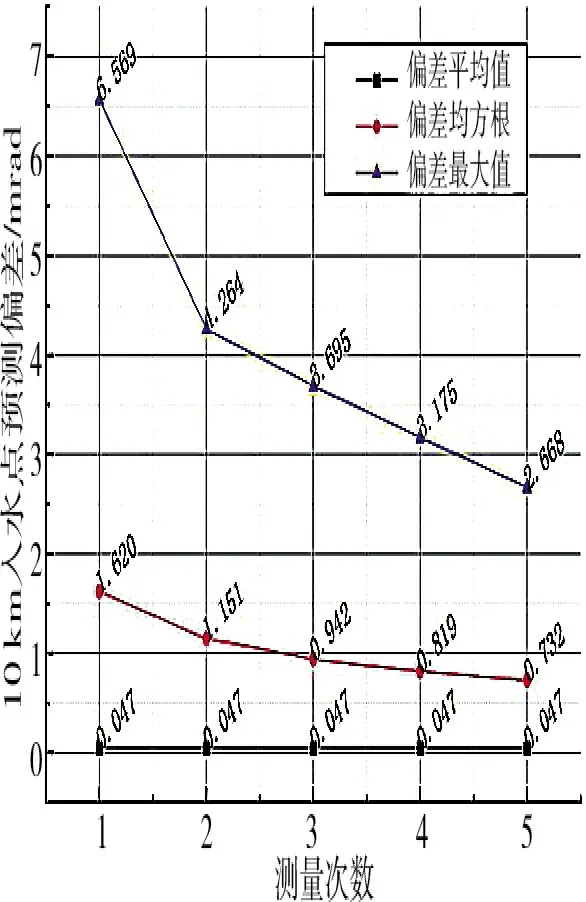
图4 入水点的校准偏差结果统计(10 km)Fig.4 Calibration deviation result statistics with entry point of(10 km)
从图可以看出,一次校准(发射一次炮弹)的精度已达到毫弧量级(均方根1.619,最大偏离6.602),且外在因素带来偏差均值0.045 可忽略不计。与当前的声呐指标相比,精度提升1~2 个数量级。如多次校准(发射多发炮弹)取平均,可进一步提升校准的精度。校准次数越多,精度越高。其中,两次校准取平均带来的精度提升最明显,效益最大。
4.2 入水点距离对校准效果的影响分析
仿真模拟对[0.1 km,20 km]不同距离方法的校准偏差情况,各个距离分别模拟10 000 次,分别统计一次测量和两次测量取平均的校准偏差情况,结果见下页图5、图6。从图中可以看出,200 m 时校准偏差已低至2 mrad(1 σ)左右,方法已有很好的校准精度。水柱在1 km 之外,距离带来的精度提升已经微乎其微。具体向多远距离发射炮弹校准声呐,可结合校准时间限制(远距离时炮弹飞行时间略长)和水域范围综合确定。
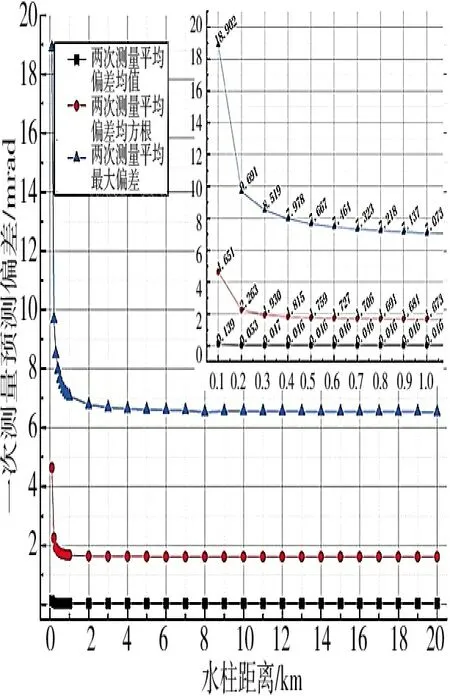
图5 不同距离一次测量的校准偏差结果统计Fig.5 Once measured calibration deviation result statistics at different ranges
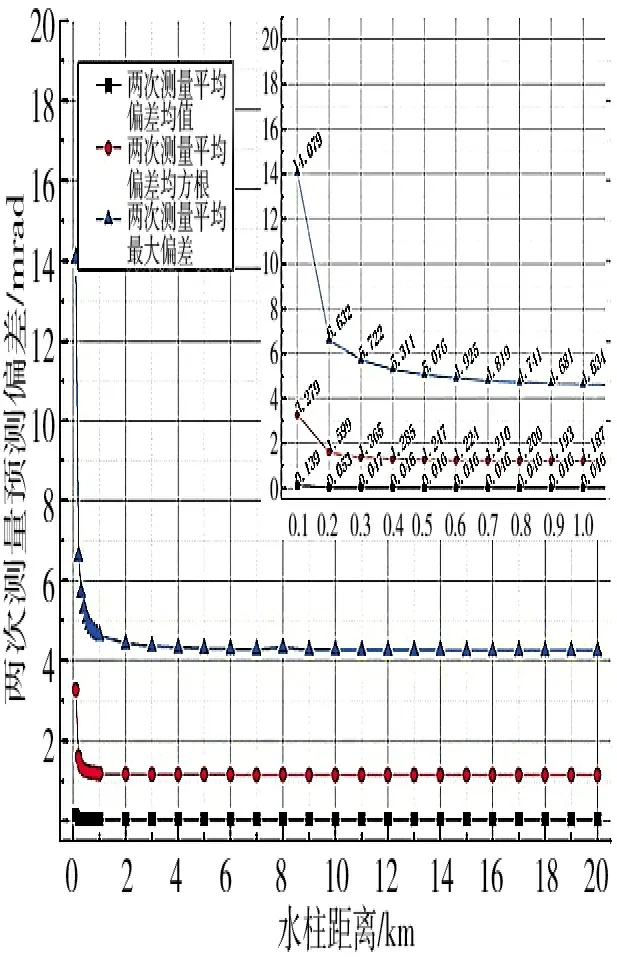
图6 不同距离两次测量取平均的校准偏差结果统计Fig.6 Averaged calibration deviation result statistics measured twice at calibration deviation result statistics
4.3 航速、航向对校准效果的影响分析
从校准方法精度(校准偏差)计算公式可以看出,方法不受舰船静止或运动,以及不同运动模式的影响。仿真试验进一步验证了该结果,在此不赘述。
5 结论
本文提供一种使用跟踪雷达观测水柱辅助声呐校准方法,利用了舰炮武器系统,通过向拟校准区域发射炮弹,跟踪雷达跟踪炮弹飞行至入水雷达观测到水柱信号,声呐从水下探测炮弹入水声音,根据不同时刻舰船的位置姿态等信息,跟踪雷达测量信息转换为其他时刻声呐位置的理论探测角度等流程,得到声呐的校准偏差。仿真结果表明,通过本文提供的校准方法,声呐系统偏差由度级降低至毫弧级,大幅降低了声呐安装、船体形变、水文环境等因素对声呐探测基准的影响。
同时,该方法充分利用了舰船自身装备,无需其他场地或设备辅助,对标校的时间、地点,以及舰船运动状态等无特殊要求,具有方便、快捷、成本低等特点,有较高的实际应用价值。
